本文是一篇工程硕士论文,本文设计了课题整体方案,详细介绍了全向轮移动机器人、深度传感器D435等设备的特点。利用压力传感器量化使用者下坐位置的合适程度。使用UWB弥补深度传感器,因为机器人移动距离过短导致无法获取距离信息问题。
第1章 绪论
1.1课题研究背景及意义
1.1.1医疗机器人应用广泛
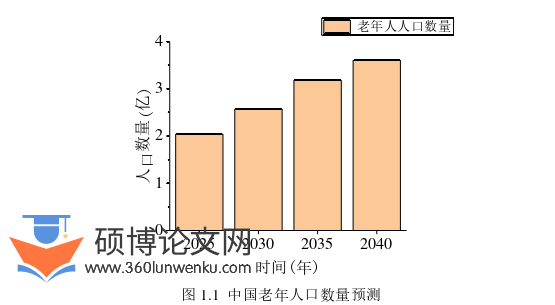
自20世纪50年代以来,我国人口数量迎来了持续增长趋势,社会人口数量明显上升。随着物质环境的极大改善,开始出现少子化的趋势,导致社会劳动人口开始呈现下降趋势,老年人口基数在社会人口的比例在不断增长[1]。从全球的老龄化人口标准定义,当一个地区或者国家中超过60岁的人口占全社会人口基数的12%时,即可认为该地方已经步入老龄化社会[2]。我国国家统计局曾预测我国的老年人口变化趋势。有学者指出,我国老龄化呈现出较为平缓的深化趋势。老年人口占社会人口总数的态势一直保持上升趋势。许多学者通过模型预测,如图1.1所示,在2035年后,老龄人口在我国的数量至少超过3亿人[3],深度老龄化社会开始显现。而且老龄人口的增加,导致各类社会问题也随显现出来。不少老年人缺乏生活自理能力,使家庭成员背负沉重的经济负担。对政府而言,生活无法自理的老人需要组织更多的护理人员投入到养老保障事业中,加剧了社会运行的人力成本和财政负担。
工程硕士论文怎么写
......................................
1.2国内外研究现状
1.2.1如厕辅助机器人发展现状
在老年的康复辅助机器人的研究过程中,需要面临许多挑战和难题。需要针对各种应用场景和老年人失能的情况,设计出不同类型的如厕机器人。关于设计如厕机器人和如厕交互系统类型中,现如今,大体设计出四类大类型的如厕机器人:固定伸缩式辅助如厕机器人、固定床式辅助如厕设备以及移动式辅助如厕机器人、搬用辅助式如厕机器人。
(1)新型被动如厕辅助机器人
关于被动站坐的辅助助行器的构成,它由一个四轮移动底座、带有旋转和刚性的双杆以及一个安全带组成[11]。如图1.3所示,每根杆之间相互连接,并且其旋转运动可以推动双杆进行同步运动。
支撑刚性部件连接到杆上,并带有滑块和气体弹簧。旋转部件具有气体弹簧,可驱动双杆的旋转运动。而安全带的两端被固定约束到膝盖和刚性杆前面的一个点,其形状避免覆盖髋关节,影响老人在如厕使用。并且考虑到坐着时向后摔倒的风险,在双膝前放置搁脚板。
该机器人的安全带与大腿后部和下背部有接触点,通过拉起支撑点,用户可以从安全带获得帮助并改变姿势。施加在安全带上的力大小和方向将根据用户的姿势而变化。如图1.4所示,当使用者上半身向后倾斜时,下半身安全带的反作用力会增加,从而防止使用者向后摔倒,这种设计结构使使用者在姿势转变过程中变得稳定性。由于该机器人的安全带是镂空,避免髋关节被安全带覆盖,用户可以直接坐在马桶上。安全带连接到膝盖前面的一个固定点,以及刚体部分中滑块的每一侧。无论是站立或者下坐姿势,安全带的设计可以为身体后部留有一些空间。
................................
第2章 如厕辅助机器人的系统
2.1总体框架
本文主要讨论人机交互系统中主要的硬件组成部分以及系统的流程设计。通过安装在辅助机器人前方的D435深度摄像头可以检测出人体的轮廓,然后利用YOLOv4-Tiny与DeepL abC ut判断使用者所在区域以及下体关节点的位置信息,基于得到的使用者关节位置数据,通过预测算法预测出使用者下坐的位置,最后控制机器人移动到预期的下坐位置。来避免护理人员花费大量体力调节使用者的下坐姿态适应机器人移动位置,以及需要分散注意力配合机器人运动可能对老人带来的二次伤害。
本论文为保证深度视觉传感器可以获取使用者髋关节以及膝关节的位置信息,设置机器人与使用者的的初始距离为2米至4米,如图2.1所示,首先深度摄像头检测出使用者和护理人员交互过程中的轮廓信息特征,收集护理人员和使用者各类混合站姿深度图像,使用YOLOv4-Tiny对深度图像进行训练,用以检测分类出使用者和护理人员的站姿分布。
每一种站姿位置图片需要估计出使用者关节点的位置,使用DeepL abC ut框架进行训练学习,得到每一站姿分布的训练模型。通过训练模型估计出使用者的关节点像素位置分布,接下来根据每一时刻深度图像的关节点像素位置,应用D435软件开发工具的像素坐标系与世界坐标系的转换算法,得到使用者髋、膝关节的实际下坐轨迹数据。下一步通过神经网络构建出使用者的下坐姿态,并基于扩展卡尔曼滤波建立下坐运动模型。根据建立的下坐运动模型和D435采集的关节数据使用多模型交互算法算法预测使用者的下坐位置。最后根据获得的下坐位置,设计滑模控制器控制机器人移动到预测的下坐位置,满足使用者的如厕需求。
....................
2.2硬件介绍
2.2.1全向轮如厕辅助机器人
康复医疗机器人主要应用在家庭、养老院以及康复中心,因此大多具有小型化以及灵活性强等特点[19]。一般的移动机器人大多都是双轮或者四轮结构的机器人,因为其机器人结构以及车轮的特点,无法完成横向移动以及零半径转弯运动,进而无法实现全向运动。而本文使用的三轮全向轮移动可以实现横向移动以及零半径转弯运动。如图2.2所示,该机器人的构造形状呈现正三角型结构。底盘支架的每一个角装设一个全向轮,每个轮之间的夹角呈现120°均匀分布,每个全向轮都是主动轮和从动轮组成,主动轮可以实现直线移动,而从动轮可以实现原地旋转以及转弯运动。机器人拥有手动操作系统,可以手动调节机器人的性能,增加全向轮机器人适应性。
2.2.2D435深度摄像头
本论文选择的传感器是D435深度视觉传感器。如图2.3所示,英特尔的Real Sense D435是一款解决立体追踪问题的摄像头[20]。使用英特尔实感(Software Development Kit SDK)2.0软件可以获得深度视觉和彩色视觉。与Kinect深度视觉相比,D435传感器具有摄像精度高、价格低廉、抗干扰性强、获得深度视觉距离远等优点。D435拍摄的最远距离可以达到10米。在图像分割以及目标视觉追踪、移动导航中得到了广泛应用,因此非常适合作移动式机器人的传感器。D435的开发拓展性良好,可以将英特尔模块和视觉处理器集成到一起跨平台使用,既可以使用因特尔公司的SDK软件进行开发,也可以使用python、C++、C语言开发。D435相机参数如表2.1所示。并且因特尔公司开发D435 SDK的软件开发工具(SDK)拥有D435从像素坐标系信息转化世界坐标系信息的作用,可以帮助研究人员实现二次开发。
.................................
第3章 深度图像分类检测与人体关节估计 .............................. 19
3.1YOLOV4-TINY框架检测 ............................. 19
3.1.1YOLOv4-Tiny介绍 .................................... 19
3.1.2YOLOv4-Tiny训练过程 ........................ 22
第4章 人机交互预测及追踪 ..................................... 30
4.1深度图像距离数据的处理 ............................... 30
4.1.1基于D435深度视觉传感器测量数据 ......................... 30
4.1.2以使用者膝关节为原点获得使用者髋关节距离信息 .................. 33
第5章 结论 ............................. 54
第4章 人机交互预测及追踪
4.1深度图像距离数据的处理
4.1.1基于D435深度视觉传感器测量数据
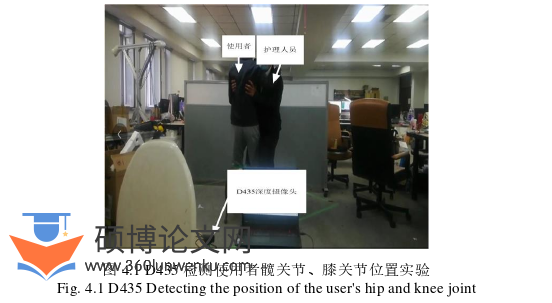
D435的有效距离是0.1米至6米,为了保证机器人能到达使用者的下坐位置,获取使用者的髋关节以及膝关节的距离信息。本论文设计的实验环境中,如厕辅助机器人与使用者的起始距离最大距离是4米,最小的距离是2米。如图4.1所示,如厕辅助机器人与使用者的交互过程,将D435深度摄像头安装在如厕辅助机器人的前方,护理人员帮助使用者下坐在与机器人同等高度的椅子上,获得不同的下坐轨迹。
工程硕士论文参考
....................................
第5章 结论
本文主要解决深度图像的双人站姿分布的识别以及使用者的像素关节点提取和获得人体下坐轨迹数据预测使用者的落座点以及驱动机器人追踪使用者下坐位置问题。针对以上问题,本文做了如下工作:
(1)查询大量文献分析了当下老龄化的趋势以及失能老人失能等级的人数分布和因为老龄化程度的加剧导致的智能康复设备需求增加问题。尤其对老人如厕失能问题展开了研究。介绍了可以帮助如厕失能老人完成如厕的智能机器人设备以及使用方法。迄今为止,大部分的智能如厕机器人不是轻量化和小型化,不利于在狭小空间完成老年人的如厕需求,而如厕机器人为了保护人体隐私,在检测人体方面无法使用高维度特征的传感器,导致无法正确获得使用者的髋关节以及膝关节的距离信息。因此提出使用深度摄像传感以及下坐位置预测方法,解决如厕辅助的追踪使用者落座点问题。
(2)设计了课题整体方案,详细介绍了全向轮移动机器人、深度传感器D435等设备的特点。利用压力传感器量化使用者下坐位置的合适程度。使用UWB弥补深度传感器,因为机器人移动距离过短导致无法获取距离信息问题。细化在护理人员帮助下老年人双腿站姿分布情况,总结出深度图像的双人站姿分布不确定问题。
(3)针对双人站姿分布不确定问题,提出设计方案。首先介绍YOLOv4-Tiny的特点,并且使用YOLOv4-Tiny训练深度图像下双人站姿的分类检测,得到较高的分类精度。并介绍DeepL abC ut姿态估计算法的原理,应用DeepL abC ut对四种站姿分布进行关节点模型训练。利用相似像素坐标验证每种关节训练模型的有效性。在得到每种深度图像的站姿分布的使用者像素坐标情况下,使用D435的SDK像素坐标转世界坐标算法,得到使用者的下坐轨迹数据。通过下坐实验实验证实数据的有效性。
参考文献(略)