本文是一篇工程硕士论文,本文以巡检机器人上的七自由度冗余机械臂为研究对象,为充分利用冗余机械臂在运动时带来的优势,提高工作效率,对其进行正逆运动学分析、轨迹规划和避障路径规划。
第一章 绪论
1.1 课题来源与研究背景
1.1.1 课题来源
本课题来源于巡检机器人的研究领域,具体项目为:山西省基础研究计划的“新型混联轮式巡检机器人的拓扑研究与整机建模”(项目编号:202103021224264)。
1.1.2 课题研究背景和意义
机器人制造技术广泛应用可以追溯到上个世纪50年代,最初主要用于工业自动化生产线中的物料搬运和装配等工作,随着科技的发展,机器人制造技术逐渐应用在更多的领域,包括但不限于:工业领域、农业领域、清洁领域、军事领域、娱乐领域、医疗健康领域和食品检验领域。随着各个国家大力推动机器人制造技术的发展,互联网时代信息处理和未来电子智能化自动控制技术相结合,机器人逐渐向更高的灵活性和准确度方向发展。
传统机械臂制造的目的是应用在危险环境和减轻工人的劳动强度,机械臂的出现也使得产品的生产质量和效率有很大的提高,但是传统的机械臂还有很大的改进空间,保证工人在生产过程中安全的前提下,缩小机械臂的体积和噪音。随着科技迅速的发展,机械臂的各项缺点已经得到了改善并向着高精度行业快速渗透。机械臂为了满足实际生活的需要,变得更加的安全、轻便和更容易操作[1],在未来发展中将要求机械臂能够自行感知环境中的障碍物,并规划合适的路径来躲避障碍物,同时实现人类和机械臂协同工作,提高工作效率。
........................
1.2 冗余机械臂研究现状
冗余机械臂的研究在国外最早起源于20世纪80年代。1987年,日本的工业技术综合研究所(MITI)研究出了一款七自由度的自动缝补服装的机械臂,大大提高生产效率和质量。同年,美国的Robotics Research公司研究出十七自由度的超冗余机械臂。国内针对冗余机械臂的研究比较晚,1993年在张启先院士的带领下完成了国内第一台七自由度的冗余机械臂。1994年北京航天航空大学研究团队生产出了BUAA-RR7冗余机械臂。
德国库卡机器人首先在工业机械博览会上展示了第一款七自由度的轻量化机械手臂LBB iiwa,如图1.1所示,该机械臂由SRS结构组成,七个自由度实现灵活操作。ABB在市场上推出YuMi双臂轻型协作机械臂如图1.2所示,被广泛应用在各种小件包装和人机协作等领域。安川电机研制出多种类型的七自由度重型焊接机械臂,例如生产的D和SIA系列的七自由度重型焊接机械臂和轻型焊接机械臂。FAUNC公司自主研发专门针对狭小弧形空间内部的自动焊接机械臂。

工程硕士论文怎么写
.............................
第二章 冗余机械臂运动学分析
2.1 引言
机械臂是由几个连杆和对应的关节组成,可以在笛卡尔空间中进行高度复杂的工作。运动学是控制的基础,是为了研究关节空间参数与笛卡尔空间机械臂末端参数之间的关系。运动学分析需要掌握冗余机械臂各个关节变量和工作空间,控制好冗余机械臂末端到达的位置在工作空间内,同时需要保证在关节角度在运动变化中必须满足约束条件。运动学分析是机械臂是否能完成工作的前提,也是轨迹规划的必备基础。
本章围绕七自由度冗余机械臂的建模问题展开研究,首先描述冗余机械臂运动空间的位姿与各种坐标系之间的转换关系;描述了D-H求解方法,推导出各关节的齐次变换矩阵,建立七自由度冗余机械臂运动学模型,推导出正运动学公式;最后利用Matlab软件仿真验证。
......................
2.2 机构说明
本文以北京一维弦的Heptarm七自由度冗余机械臂为例,如图2.1所示。Heptarm机械臂是开放式的结构,在需要的时候方便更换和添加其他模块,可以与外部系统进行广泛通信,适合进行机器人相关领域的学习与研究。以下是对机械臂建模的数理基础。

工程硕士论文怎么写
2.2.1 位姿的描述
在空间中刚体之间位姿描述有很多方式,比如四元数法、齐次变换方法和矩阵指数法[63]。齐次变换方法是将刚体之间的关系通过变换矩阵相关联,在与其他方法的比较中,它具有能直接观察到几何特征。
...............................
第三章 基于改进麻雀搜索算法的冗余机械臂逆向运动学分析 ........ 23
3.1 引言 ................................ 23
3.2 改进麻雀搜索算法 ........................... 23
第四章 冗余机械臂的时间最优轨迹规划 .......................... 33
4.1 引言 .............................. 33
4.2 笛卡尔空间轨迹规划 ....................... 33
第五章 冗余机械臂避障路径规划 ............................ 49
5.1 引言 ...................................... 49
5.2 包围球碰撞检测和距离计算 ............................... 49
第五章 冗余机械臂避障路径规划
5.1 引言
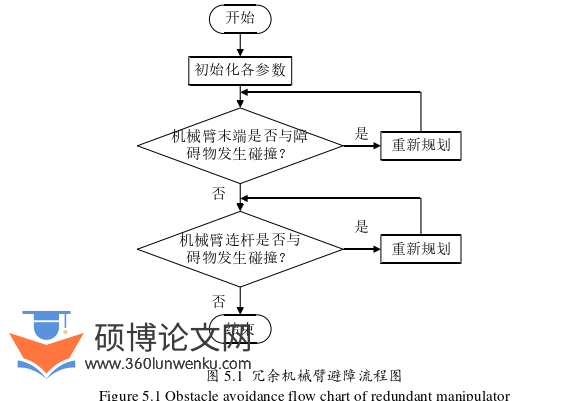
机械臂的避障路径规划是在完成任务的前提下,快速灵活的避开空间中的障碍物。机械臂的避障路径规划在障碍物空间的约束下进行碰撞检测,主要是包括笛卡尔空间中机械臂末端和障碍物的碰撞检测,关节空间中机械臂连杆和障碍物的碰撞检测,以实现在机械臂快要碰到障碍物之前规划好路径避开障碍物。冗余机械臂能在狭小空间内灵活避障,快速到达目标位置。
本章首先描述了包围球的碰撞检测方法;将冗余机械臂连杆通过圆柱包络,障碍物进行球包络,计算连杆和障碍物之间的距离,防止机械臂与障碍物之间发生碰撞;针对冗余机械臂避障问题,分别采用RRT算法与RRT-Connect算法,对冗余机械臂进行避障路径规划,在避障的同时保证机械臂运动的速度,得到没有碰撞的路径点。冗余机械臂避障的具体流程如图5.1所示。
工程硕士论文参考
........................
第六章 总结与展望
6.1 全文总结
本文以巡检机器人上的七自由度冗余机械臂为研究对象,为充分利用冗余机械臂在运动时带来的优势,提高工作效率,对其进行正逆运动学分析、轨迹规划和避障路径规划,主要内容如下:
(1)阐述了七自由度冗余机械臂建模的运动学数理基础,根据数学关系推导出冗余机械臂正运动学公式,利用D-H法对七自由度冗余机械臂进行建模,并验证推导公式的正确性;最后使用蒙特卡洛法对冗余机械臂的工作空间进行分析。
(2)针对七自由度冗余机械臂逆运动学求解问题,提出了一种改进麻雀搜索算法(ISSA),该算法利用Halton序列初始化种群,避免算法在迭代过程中出现局部最优的情况;结合蝴蝶优化算法(BOA)提高发现者全局搜索能力;最后高斯变异避免局部最优解。将ISSA算法用到冗余机械臂逆运动学求解中,以位姿误差作为适应度函数,仿真结果显示ISSA算法在精度和稳定性上都优于SSA算法;以位置误差和运动中关节变化最小的加权和作为适应度函数,更进一步验证了ISSA算法适用于冗余机械臂逆运动学求解。
(3)对七自由度冗余机械臂的轨迹规划进行研究,分别在关节空间和笛卡尔空间中进行轨迹规划。在笛卡尔空间中,分别对直线插补和圆弧插补进行轨迹规划并建立仿真实验;在关节空间中,分别对三次多项式和五次多项式进行轨迹规划并建立仿真实验;构建3-5-3的混合多项式对多点路径进行轨迹规划,为了缩短混合多项式的轨迹规划的时间,提出了以时间最优轨迹规划为约束的自适应粒子群算法(APSO),仿真结果显示优化后的时间缩短了27.56%,且冗余机械臂各关节连续平稳没有出现突变情况。
(4)在工作空间的避障路径规划中,阐述了包围球法的碰撞的数理基础,并选用包围球进行碰撞检测;对RRT算法和RRT-Connect算法避障原理进行了阐述,分别在二维平面和三维空间中对两种算法进行仿真验证,结果显示RRT-Connect算法在运行时间和路径长度方面都优于RRT算法;在实际环境中搭建试验台,验证了RRT-Connect算法避障性能,冗余机械臂可以有效的避开障碍物并完成路径规划。
参考文献(略)