本文是一篇工程硕士论文,本文针对带有未知非线性动态、输入输出约束等问题的网络化机械臂系统,研究了收敛时间与系统初始状态无关的事件触发式有限时间控制方法。
第一章 绪论
1.1 研究背景和意义
随着计算机技术、通信技术、控制技术等的快速发展,机器人技术取得了跨越式的进步。机械臂是制造业中一种常见的工业机器人,在工业领域发挥着重要的作用,可以替代人类完成多种生产任务,例如焊接(图1-1)、打磨(图1-2)、喷漆(图1-3)、码垛(图1-4)等。我国是一个制造业大国,随着人口老龄化的到来,劳动力将大量缩减,工业机器人替代人类进行工业生产制造是未来的一个大趋势。
工程硕士论文参考
在对机械臂的研究中,学者们提出了许多控制方法,但大部分方法只能保证非有限时间稳定,需要无限长的时间实现系统的最终稳定,达不到实际工程应用中对于快速稳定的特殊要求。近些年来,出现了一些有限时间控制方法,这种方法具有较强的鲁棒性和抗干扰能力,并且可以实现误差的有限时间收敛[1]。然而,其收敛时间与系统的初始状态有关,当系统初始状态离平衡点较远时,收敛时间会变得很长[2]。
.........................
1.2 研究现状
本节简单介绍与课题相关的智能控制方法,包括事件触发控制和有限时间控制。此外,对当前机械臂控制的主流方法进行了介绍。
1.2.1 事件触发控制
在实际的应用中,机械臂控制的实现是基于计算机平台,控制系统的各个组件通过网络连接来实现闭环控制,即所谓的网络化控制系统[5]。网络化控制系统具有控制效率高、配置方便、维护成本低等优点,因此越来越受到人们的重视。网络化控制系统的一般结构如图1-5所示,所有信号通过网络传输。一个通信网络通常由不同的系统节点共享,而系统资源,包括通信信道带宽和计算能力,是有限的。在保证控制性能的前提下,减少通信资源的占用对于实际的控制问题至关重要。传统的网络化控制系统采用的是时间触发机制,会产生大量的冗余信号传输,这不可避免地造成了通信资源的浪费。

工程硕士论文怎么写
..........................
第二章 相关理论与方法
2.1 引言
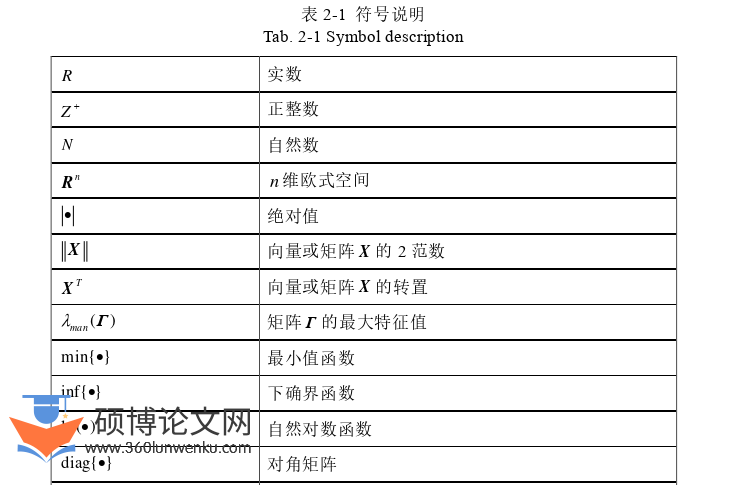
本文以网络化机械臂系统为研宄对象,考虑系统存在通信资源约束、不确定性、输出约束、输入死区等问题,研究如何使系统在一个与系统初始状态无关的固定时间内稳定。为方便后续章节内容的展开,本章对需要用到的相关概念、理论和方法进行了详细的介绍。后文需要用到的符号和简写如表2-1所示。
工程硕士论文参考
.........................
3.1 引言
在实际的工程应用中,由于机械臂自身复杂的结构、外界干扰等因素等,机械臂系统的模型往往是不确定的。针对系统的不确定性,利用FLSs或RBFNNs对未知系统动态进行拟合逼近是一种常用的方法。文献[25]和[26]分别利用RBFNNs和FLSs逼近处理系统中的未知动态,提出了具有给定动态性能的智能控制方法。此外,考虑到安全问题,机械臂通常需要限制在一定的关节空间作业。因此,状态约束控制方法得到了广泛的研究[58-62]。其原理是通过构建障碍李雅普诺夫函数使跟踪误差限制在一定的域内,从而使系统的状态满足约束要求。比如,在文献[58]中,Liu等人在反步控制的框架中引入了“log”型障碍李雅普诺夫函数,提出了具有全状态约束的智能控制方法。在文献[61]中,He等人利用正切型障碍李雅普诺夫函数研究了带有输出约束柔性关节机械臂系统的预设性能控制算法。这些约束控制方法可以很好的应对系统可能面临的状态约束问题,但是这些方案的工程实施采用的是时间触发机制,系统的稳定需要系统内部进行高频的信号传输,而系统的通信和计算资源是有限的,这可能会导致丢包、时延、拥塞等问题,从而影响系统性能,甚至导致系统不稳定。另一方面,这些方法均是非有限时间控制方法,理论上,系统最终的稳定需要无限长的时间。
受上述文献的启发,本章基于Backstepping技术,研究了具有输出约束机械臂系统的事件触发式有限时间控制。首先,构建了障碍李亚普诺夫函数对系统输出进行约束,并利用RBFNNs逼近未知非线性特性;其次,设计了事件触发机制来减小控制信号的更新频率,进而缓解系统通信压力;在此基础上,基于实际固定时间稳定理论,构建了事件触发式自适应神经网络控制器。从理论上证明了,跟踪误差可以在一个与系统初始状态无关的时间内收敛至原点附近,且系统输出满足约束要求。最后,两个仿真实验验证了所提出方法的可行性。
.......................
第三章 具有输出约束机械臂系统的触发式有限时间控制 ................ 17
3.1 引言 .................................. 17
3.2 系统描述 ............................ 18
3.3 事件触发式自适应神经网络控制设计及稳定性分析 ................ 18
第四章 带输入死区机械臂系统的触发式有限时间补偿控制 ............ 38
4.1 引言 ................................... 38
4.2 系统描述 .......................... 39
4.3 事件触发式自适应补偿控制设计及稳定性分析 ........................ 40
第五章 基于有向图的多机械臂系统分布式有限时间一致跟踪控制..........61
5.1 引言 ................................. 61
5.2 系统描述 ............................ 62
5.3 分布式事件触发一致跟踪控制设计及稳定性分析 .................... 63
第五章 基于有向图的多机械臂系统分布式有限时间一致跟踪控制
5.1 引言
前面两个章节研究的是针对单机械臂的智能控制方法,这些方法不适用于多机械臂的协同控制。随着机械臂在工业领域的发展,作业任务变得越来越复杂,单一的机械臂不能很好地完成,多机械臂的协同是未来的趋势。在多机械臂系统中,所有的子系统通过通信拓扑网络连接,各子系统通过感知邻居或领导者的状态信息完成协同任务。多机械臂系统完成协同任务需要协同控制算法的支撑,因此研究多机械臂的协同控制算法具有重要意义。在文献[68]和[69]中,作者利用图论相关知识描述了多机械臂系统内部的信息传递,提出了两种不同的一致跟踪控制设计。在文献[70]中,作者将命令滤波的方法引入了反步过程中,提出了多机械臂系统的自适应命令滤波反步控制方法。这些方法虽然可以实现多机械臂的协同控制,但是这些方法均是非有限时间控制方法,实现系统的最终稳定状态理论上需要无限长的时间。另一方面,多机械臂系统协同控制的实现需要内部之间进行高频的持续通信,然而系统的通信资源是有限的,这些方法均没有考虑实际应用中可能面临的通信资源约束问题。
受上述研究成果的启发,基于Backstepping技术,本章研究了网络化多机械臂系统的分布式事件触发有限时间一致跟踪控制。首先,利用有向图描述子系统之间的通信,并利用RBFNNs逼近未知的非线性特性;其次,考虑到实际应用中可能存在的网络拥塞问题,设计了事件触发机制来减小控制信号的更新频率,进而缓解系统通信压力;在此基础上,基于固定时间稳定理论,构建了分布式事件触发一致跟踪控制器。从理论上证明了,系统同步误差可以在一个与系统初始状态无关的时间内收敛至原点附近。最后,将所设计的算法应用到了通过通信拓扑图连接的多二连杆机械臂系统,仿真结果验证了方法的可行性。
............................
第六章 总结与展望
随着智能控制技术、计算机技术、通信技术等的快速发展,基于网络传输信号的机械臂得到了广泛的应用。然而,针对网络化机械臂控制系统的研究还不够完善。一方面,虽然已有的有限时间控制方法可以实现系统的有限时间稳定,但是其收敛时间与系统的初始状态有关,当系统初始状态离平衡点较远时,收敛时间会变得很长。另一方面,有限的通信资源使得系统难以承担大量的通信任务,高频的信号传输可能会导致网络拥塞,从而影响系统性能。此外,存在于机械臂系统中的各类非线性约束如:输入死区、输出约束、执行器失效等,不仅会影响跟踪性能,还可能导致系统不稳定。兼顾这几个方面的问题,研究如何设计控制器使系统在一个与初始状态无关的时间内稳定,这是极具挑战性和现实意义的课题。本文在考虑上述问题的基础上,针对具有不同约束的机械臂系统提出了三个智能控制方法。具体概括如下:
(1)针对具有输出约束的机械臂系统,提出了一种事件触发式有限时间控制方法。首先,为了使系统输出满足输出约束要求,构建了障碍李亚普诺夫函数对系统输出进行约束,并利用RBFNNs逼近未知非线性特性;此外,设计了事件触发机制来减小控制信号的更新频率,进而节约通信资源;在此基础上,构建了事件触发式自适应神经网络控制器。通过理论和实验证明了,使用所设计的控制器,系统可以在一个与系统初始状态无关的时间内稳定,且系统输出满足约束要求。
(2)针对具有输入死区约束的机械臂系统,提出了一种事件触发式有限时间补偿控制方法。首先,利用RBFNNs逼近未知非线性特性,利用自适应控制技术设计了输入死区的自适应补偿机制;此外,设计了事件触发机制来减小控制信号的更新频率,进而节约通信资源;在此基础上,构建了事件触发式自适应补偿控制器。通过理论和实验证明了,使用所设计的控制器,即使系统受到输入死区的影响下,跟踪误差仍可以在一个与系统初始状态无关的时间内收敛至原点附近。
(3)针对通过网络连接的多机械臂系统,提出了一种分布式事件触发有限时间一致跟踪控制方法。首先,利用有向图描述子系统之间的通信,并利用RBFNNs逼近系统中的未知非线性特性;此外,设计了事件触发机制来减小控制信号的更新频率,进而节约通信资源;在此基础上,构建了分布式事件触发一致跟踪控制器。通过理论和实验证明了,使用所设计的控制器,系统的同步误差可以在一个与系统初始状态无关的时间内收敛至原点附近。
参考文献(略)