第 1 章 绪论
1.1 课题背景及研究的目的和意义
本文的研究是来自于吉林省科技厅项目“吉林省电动汽车整车与底盘控制关键技术研发创新团队(20180519014JH)”。
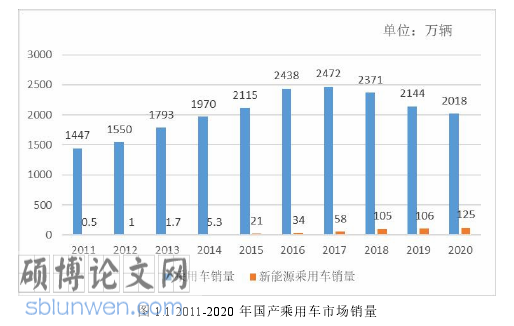
伴随着汽车行业日新月异的发展趋势的同时,针对全球范围内的能源枯竭问题以及由传统燃油汽车所引起的环境污染问题也逐渐引起人们的重视。中国汽车市场进入存量时代,新能源汽车市场逆势上行,逐步渗透燃油车市场。乘用车行业经过持续数年的快速发展,在 2018 年第一次产生负增长,并在后续三年出现销量降低,中国汽车市场步入新的存量竞争阶段。与此同时,国内的新能源汽车市场在政策扶持、市场引导、营销多元化、用户接受度提升等因素共同影响下,年度销量从 2011 年的 5,000辆快速增长至 2020 年的 125 万辆,渗透率也达到了 6.2%。特别是 2019 年的补贴大幅退坡和 2020 年的疫情冲击后,销量不降反升,标志着新能源汽车市场逐渐由政策驱动转向市场驱动,市场成熟度提升。
....................................
1.2 后轮独立驱动电动汽车底盘控制系统
电动汽车底盘的控制方案,参考其作用模式的区别,重点分为三类[3]:纵向、侧向与垂向控制。不同的系统包含了许多小的部分,接下来会对每个系统做简要的介绍。
制动防抱死系统(ABS):在车辆进行制动时,可以对制动器的制动力自动控制其大小,防止车轮抱死的情况发生,为了获得最佳的制动效果,应该使车轮的滑移率在 20%左右。ABS 的主要用途是,防止紧急刹车时车轮抱死导致车辆失控,车轮边滚动边制动,可以增大摩擦力,减少刹车消耗,刹车效率高达 90%。牵引力控制系统(TCS):汽车在低摩擦系数路面上起步、急加速或者制动时,车轮可能出现打滑的现象,更有可能使车辆方向失控。此时,TCS 系统通过传感器得知从动轮的速度小于驱动轮的速度时,就会减小气门开度等方式防止车轮出现打滑的情况。横摆稳定性控制(ESC):为确保车辆运行中的侧向稳定指标,ECU 依靠传感器探测专项场景中具体的横摆率、侧向加速度以及方向盘转角等指标,进一步调整车轮具体的驱动力与制动力[4]。主动驱动转矩分配(ATD):运用差动驱动的模式,从而获得附加的相应横摆力矩。汽车行驶的操纵稳定性以及安全性不会受到电动汽车纵向减速度的影响[5]。
四轮转向系统(4WS):是指前轮和后轮,都可以进行转向,不仅具有前轮相同方向转向的功能,也具有与前轮反方向转向的功能。前轮转向汽车当汽车方向盘的转角和车速都不变的时候,其行驶状态也是不变的,但此时具有四轮转向功能的汽车,其行驶状态则不会是单一的,因为车辆的后轮可以与前轮角度相同,也可以不同,因而可以满足汽车安全稳定的行驶需求。主动前、后轮转向(AFS 以及 ARS):为获得相应的横摆力矩,依靠传感器测定并获得关于姿态的数据,调整具体的前轮与后轮转向角的大小。当轮胎处于非线性饱和区域时,智能控制不能再提高轮胎侧向力,控制效果无法改善[6]。运用制动力进行干涉的车身电子稳定系统(ESP)完成基本研发工作之后,因为其在运用范围方面有显著的局限,因此当前也面临淘汰。
............................
第 2 章 电动汽车底盘系统模型建立
2.1 主动转向(AFS)子系统模型
车辆转向系统用以保持或者改变车辆前进或者倒退方向,在实现驾驶人员转向目的的同时也接收到了车辆的状态信息反馈。作为底盘的重要组成部分之一,承担了人与车信息交互的重要作用,在车辆机动性以及操纵稳定性方面均有极大的影响作用及意义。主动转向系统是一种通过改变前轮的力和力矩的分布来调节汽车前轮角度的方法,对车辆的稳定行驶至关重要,改变整车性能的同时还可以提高汽车的主动安全性和操作性。
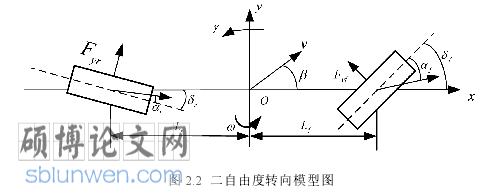
本文建立的是 2 自由度的车辆转向模型,假设行驶路面坡度为零,仅仅考虑车辆在 x 轴方向上的运动,空气阻力不被考虑在内,电动汽车主动转向系统模型如图 2.2所示。
2.2 1/4 主动悬架(ASS)子系统模型
悬架系统是车辆的车架与车轮之间的传动连接装置的总成系统,作为驱动系统的重要组成部分。除此之外,它还可以传递扭矩,缓冲吸收来自行驶路面的不平度对车辆造成冲击力,衰减振动以提高乘坐人员的舒适性,同时提高车辆的平顺性并确保车辆的安全性。传统的被动悬架因为无法对悬架的相关参数进行修改和操作,致使在悬架刚度和阻尼方面性能有所变差。这样的现象会导致车辆不能很好的适应路面的变化,舒适性和稳定性无法得到很好的保证和提升。因此,为了能够彻底解决掉该问题,半主动悬架、主动悬架应运而生,它们可以根据汽车的行驶条件自动修改参数,并具有出色的阻尼特性和减振特性。相对于被动悬架,半主动悬架可以检测到振动的位移和车辆的加速度,同时又是一种数据控制器,能够处理数据并发出控制命令。主动悬架还具有半主动悬架的附加力产生器,可以更快地调整悬架参数,使得车辆的行驶稳定性和行驶舒适性得到了进一步优化[49]。汽车主动悬架系统通过自动调节悬架的刚度和阻尼系数,产生相应的力与汽车和地面的冲击作用相平衡,保证电动汽车在不同工况不同路面下都具有一定的操控稳定性和行驶平顺性。
按照悬架模型的复杂性分类,将悬架类型分为 1/4 车辆模型、4 自由度悬架模型、7 自由度悬架模型等[39]。
为实现模型的简化和建立,对其设定下述的假设:(1)仅仅考虑线性因素。(2)考虑垂向运动和纵向运动。(3)默认轮胎不离开地面。
..........................
第 3 章 基于 Nash 博弈的电动汽车底盘 AFS 与 DYC 协调控制................................... 21
.3.1 博弈论概述......................................21
3.1.1 博弈论分类..............................................22
3.1.2 非合作 Nash 博弈.......................................22
第 4 章 基于多智能体的电动汽车底盘 AFS、ASS 与 ASR 协调控制........................... 30
4.1 图论基础..............................................30
4.2 基于多智能体的电动汽车底盘理想值观测器设计........................31
4.3 电动汽车底盘的 AFS、ASS 与 ASR 协调控制................................34
第 5 章 电动汽车底盘协调控制仿真实验分析..................................36
5.1 软件介绍...............................................36
5.2 仿真参数设置....................................................38
5.3 仿真实验结果分析................................40
第 5 章 电动汽车底盘协调控制仿真实验分析
5.1 软件介绍
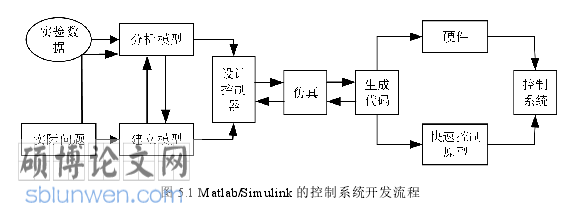
MATLAB 是高级编程软件,专注于数学计算,并提供了各种功能强大的数组运算来处理各种数据集。数组为其核心,全部的数据都运用数组表示与存储。但它也具有类似于其他计算机编程语言的编程功能,在处理数据时,MATLAB 还提供了各种图形用户界面(GUI)工具,为各种应用程序的用户开发提供了促进作用。
Simulink 包含了可以实现各种各样的系统模型所需要的仿真计算模块,可以满足系统的建模仿真的实时性要求,并且连续或者离散的采样方式可以给使用者提供更灵活的选择。同时 Simulink 具有模块化的特点,使用者可以根据实验需求,基于 Simulink模型编写各种算法,线性系统以及非线性系统的需求都可以被满足,由此可以看出Simulink 具有更好的广泛性和适用性。不仅如此,第三方的车辆相关仿真软件如CarSim、ADAMS 等,都可以通过 Simulink 进行联合仿真。在汽车、航空、工业自动化、物理逻辑,信号处理等应用领域广泛应用。
第 6 章 全文总结与展望
6.1 全文总结
伴随着电动汽车行业的蓬勃发展,底盘作为整车的部件之一,其囊括了多个影响车辆动力性、稳定性、平顺性以及安全性的控制子系统,但是各个子系统之间又存在相互耦合的关系,所以不能仅仅考虑单个系统的控制目标。由于车辆实际行驶工况中,往往面临着外界不确定的扰动以及底盘子系统之间由于耦合而造成的影响,所以不稳定工况时常存在。本文基于 Nash 博弈理论决策出了电动汽车在转向过程中需要的附加前轮转角和附加横摆力矩,解决了电动汽车在过弯时的横摆角速度和质心侧偏角无发跟踪上理想值的不足;基于多智能体理论设计电动汽车底盘理想值观测器和基于观测器补偿的底盘多智能体协调控制策略,可以使 AFS、ASS 和 ASR 三个子系统能够跟踪上其理想值,解决了传统集中控制过程中数学模型阶数高的问题,弥补了集中控制下的系统缺乏柔韧性和灵活性的不足,使控制器的设计更加方便,实现了分布式协调控制的目的。
第一章介绍本文的目的、背景与意义。检索详细资料的基础上,整理电动汽车底盘协调控制的演变进程与研究现状,以及总结了电动汽车底盘协调控制思想;并且对多智能体系统发展以及多智能体系统的协调控制进行了简要介绍,为后文所提出的控制方法做铺垫。
第二章在结合汽车系统动力学的基础上,针对本文的研究以及所提出的方法,对电动汽车底盘中的悬架子系统、转向子系统和驱动子系统分别进行建模,并做出相应的合理假设方便后续研究,为下面所提的控制策略以及在电动汽车底盘中的应用提前打好基础。
第三章主要针对底盘关键子系统之间的强耦合以及控制目标冲突关系,对电动汽车底盘的关键子系统进行了研究。利用相平面的方法划分 AFS 系统和 DYC 系统的协调工作区间,将车辆的质心侧偏角、横摆角速度偏差作为博弈参与者,利用 Nash 理论对子系统的协调控制进行了相关研究。决策出车辆在运动过程中期望的附加控制量,即附加转向角和横摆力矩,进而提高了整车的侧向稳定性能。
第四章简要介绍了多智能体理论并建立了电动汽车底盘的多智能体模型,针对电动汽车在行驶工况中所面临的子系统无法获取外部理想值信息的情况,设计了观测器,接着基于观测器的补偿,又设计了电动汽车底盘协调控制策略,明显改善了电动汽车的平顺性和操作性。
第五章首先简要介绍了 Simulink 以及 CarSim 软件,然后进行了 CarSim-Simulink联合仿真。在双移线工况和鱼钩工况下,分别进行了采用博弈控制和无控制的仿真和采用传统集中控制以及多智能体系统的底盘协调控制策略的仿真,结合仿真图进行了详尽的分析,验证了本文所提出的协调控制方法的有效性。
参考文献(略)