第 1 章 绪论
1.1 课题背景及研究意义
1.1.1 课题来源
本文依托重点研发项目“高机动应急救援车辆(含消防车)专用底盘及悬挂关键技术研发(编号:2016YFC0802902)”,以提高车辆的操纵稳定性为研究目标,对三轴重型车辆的操纵模型、主动悬挂控制器、转向状态控制器以及整车系统的仿真和试验进行分析研究。
1.1.2 课题研究背景
国民经济快速发展带动了国内公路运输事业的繁荣,再加上国家对机械产品研发的重视,这些都为重型特种车辆的发展带来活力。技术的进步让交通运输、建筑工程以及军事运载等各个方面都对汽车的大型化、轻量化以及灵活化提出了更高的要求。与中小汽车相比较,重型汽车的强度更高,功率更大,且工作效率更高,所以重型专用汽车这几年在国内得到了迅速的发展。根据中国中商情报网的统计[1] (图1-1),到 2020 年底为止,我国重型卡车的销量达到 162 万辆,累计同比增长大约 38%。2021 年虽因疫情等因素影响市场,销售预计不及 2020 年,但市场需求仍或维持在125 万辆,所以重型卡车在国内外的市场还是有一定的提高空间。
应急救援车辆由于工作性质,所以需要适应各种复杂的行驶路况,而传统通用的底盘是无法确保车辆在进行任务过程中的安全性、稳定性与舒适性。为了提高重型车辆对路况的适应能力,课题项目组提出了一种新型应急救援车辆专用悬挂技术,并以此为核心设计出应急救援车辆高机动性专用底盘,从而提高车辆乘坐的平顺性和操纵的稳定性,使得应急救援车辆能适应多种救援任务。应急救援车辆的底盘直接影响车辆是否具有良好的性能,但是国内多轴重型车辆多采用进口的底盘系统,所以,自主研发重型车辆专用底盘是十分有必要的,这样不仅能扩大国内关于车辆主动悬挂底盘研究的知识领域,而且研发出的产品能提高国民经济的收入。
...........................
1.2 主动悬挂国内外发展现状
主动悬挂系统是底盘的重要系统之一,其与被动悬挂相比多了外部能源输入(图1-3),这也是主动悬挂能自适应调节车辆行驶状态的原因。主动悬挂按照作动器工作原理的不同可以分为液压主动悬挂、电磁主动悬挂和空气主动悬挂,本次课题试验样车上装载的是液压主动悬挂(图 1-4)。
1.2.1 主动悬挂国外发展现状
国外学者早在二十世纪中期就开展了对主动悬挂的研究,德国的 Federspiel 教授最早提出了悬挂系统主动控制的想法,并将设计出的电液式主动悬挂安装在实车上进行试验。1968 年 Bender 教授讨论了预瞄控制的概念,并设计了一种主动悬挂的线性预瞄控制器,该控制器能根据提前获取的路面信息对车辆的姿态做出调整,但是路面信息的准确性和信息处理的快速性会直接影响控制器的效果。在 1976 年的时候,Thompson 教授发现最优控制算法能够很好的将悬挂系统的性能指标实现最优化,就第一次将这种理论应用在主动悬挂领域的设计中,后最优控制策略也成了主动悬挂控制常用的控制策略之一[6]。在 1989 的时候,丰田公司设计了一种液压气动式主动悬挂,并将其应用到了 CELLCA 型车上,同时还配备了多种传感器检测车身的状态,从而配合主动悬挂更好的调整车身姿态,改善车辆整体的动力学性能。
自 90 年代开始,由于考虑到主动悬挂的非线性因素,模糊控制和神经控制被相关学者应用到主动悬挂系统的研究中。在 1992 年的时候 H.K. Khail 等人看重神经网络控制算法超强的学习能力,将其应用与主动悬挂的研发之中,有效的提高了悬挂对外部环境变化的适应性[7]。Rao M.V.C 等人在 1997 年的时候将基于模糊理论设计出的主动悬挂模糊控制器,不同于传统控制器,模糊控制器处理问题更加人性化,对路面信息的不确定性有了进一步的适应度,提高了乘坐的舒适性[8]。Wang H.G.等人在研究主动悬挂的 PID 控制器时,发现所设计的控制器比较依赖系统参数的准确性,所以利用神经网络控制进行优化,有效减少了由于系统参数不确定性造成的影响,提高了控制器的控制精度[9]。
...........................
第 2 章 建立车辆操纵模型及仿真分析
2.1 建立理想操纵模型
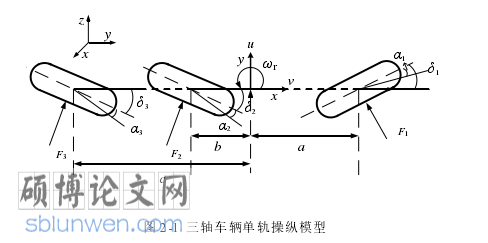
2.1.1 三轴二自由度理想操纵数学模型
为了研究操纵稳定性的本质,需要对一些外部条件进行理想化处理,使所建立的数学模型对研究的内容具有针对性。在研究三轴车辆的操纵稳定性时,对车辆操纵模型提出以下的假设条件:1、车辆整体(即底盘、悬挂和车身)是刚性连接的,忽略悬挂的实际作用;2、不考虑车辆在行驶过程中的空气阻力;3、转向动作直接作用与车轮,忽略转向系统的影响;4、假设车辆只作纵向和横向的运动,且纵向运动是匀速运动,不考虑实际运动过程中存在的垂向运动;5 轮胎侧向力是线性变化的,且车辆运动方程是线性的。
工程硕士论文怎么写
2.2 建立纯转弯工况操纵模型
2.2.1 非线性九自由度车辆操纵数学模型
上节操纵模型对车身和底盘做了理想化处理,但实际二者是弹性连接,在车辆运动时是可以进行相对的运动的,而且,车身相对于底盘会发生转动,使车体载荷的分布发生变化,从而引起轮胎力的变化,轮胎存在的非线性因素对车辆的操纵稳定性具有较大的影响。本小节建立包含魔术轮胎模型和主动悬挂模型的三轴九自由度操纵模型,考虑由车身侧倾引起的载荷重新分布对车辆运动状态的影响。
在建立数学模型之前,增加以下假设条件:1、全轮转向时车轮左右对称,且同一车轴上的车轮转角相同;2、主动悬挂(本课题为液压缸)等效为垂直方向上的弹簧、阻尼器和作动器;3、三个车轴的侧倾中心高度相同。
轮胎的侧向力是影响操纵稳定性的一个关键性因素,在上小节的理想模型中,假设了轮胎力是随着侧偏角成线性关系。但是,在实际的车辆行驶过程中,侧向力由于轮胎的材质和载荷重新分布等影响,其与侧偏角呈非线性的关系,本课题采用魔术轮胎模拟实际车辆轮胎侧向力的变化。魔术轮胎模型对轮胎的相关性参数的拟合精度能够满足试验仿真要求,所以该公式也是目前在车辆操纵稳定性领域应用较多的轮胎模型之一。魔术公式根据输入变量不同,可以得到不同的输出的变量,需要注意的是,Pacejka89 轮胎模型采用的单位与国际单位不同,如图 2-6 所示。本课题采用的是纯侧偏工况下的魔术轮胎模型,所以输入变量为侧偏角和垂直载荷,输出量为侧向力。
.............................
第 3 章 主动悬挂控制设计及优化 ........................................... 27
3.1 主/被悬挂系统数学模型 ............................................... 27
3.2 LQR 作动器设计 .................................... 30
第 4 章 转向控制器设计及仿真 ................................... 41
4.1 路面激励建模及仿真......................................................... 41
4.1.1 单轮随机路面时域模型 ............................................. 41
4.1.2 左右及前后相关车轮输入 .................................. 43
第 5 章 车辆转向稳定性仿真及试验 ......................... 54
5.1 引言 ................................... 54
5.2 试验车的悬挂系统及整车控制系统 ............................. 54
第 5 章 车辆转向稳定性仿真及试验
5.2 试验车的悬挂系统及整车控制系统
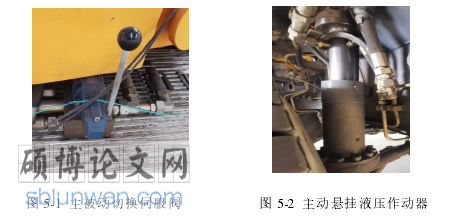
5.2.1 悬挂系统
试验样车的悬挂系统有两套,分别为油气被动悬挂和液压主动悬挂,二者的切换可以通过伺服阀(图 5-1)进行切换,通过手动或者电控可以控制伺服阀进行动作。试验过程中,通过伺服阀切换主被动动悬挂系统,即可观察在同样的外部输入条件下悬挂系统对车辆操纵稳定性的影响。
工程硕士论文参考
.............................
结论
本文依托国家重点研发计划项目“高机动应急救援车辆(含消防车辆)专用底盘及悬挂关键技术研究”(项目编号:2016YFC0802902),以提高车辆的操纵稳定性为研究目标,对三轴重型车辆的操纵模型、主动悬挂控制器、转向状态控制器以及整车系统的仿真和试验进行分析研究。整文主要的研究成果如下:
(1) 建立了三轴车辆操纵模型并进行仿真。首先建立了理想操纵模型,然后根据不同工况分别建立了九自由度和十五自由度的非线性操纵模型,最后利用魔术轮胎模型分析了轮胎非线性和纵向力对侧向力的影响。
(2) 建立了主动悬挂系统模型并进行优化。首先建立了整车悬挂耦合数学模型,并设计了 LQR 悬挂控制器,之后利用改进遗传算法对控制器进行了优化。通过仿真的数据可知,与被动悬挂相比,主动悬挂相对应的指标分别下降了 49.05%、69.49%和 55.82%,轮胎动位移也下降了 12.3%~49.38%,有效维持车身姿态的平稳。
(3) 设计了转向状态控制器并进行优化。首先以理想转向状态为控制目标,分别设计了基于质心侧偏角、横摆角速度和二者联合反馈的模糊控制器。然后在联合反馈控制的基础上,设计了具有动态模糊因子的自适应模糊控制器。通过仿真可知,与联合模糊控制相比,自适应模糊控制器使操纵稳定性相对应指标分别下降了 36%和 62%。
(4) 进行了主/被动悬挂车辆的对照试验。试验结果表明:与被动悬挂相比,在联合工况下,具有主动悬挂车辆的侧倾角和俯仰角的均方根值以及侧向加速度方差分别下降 4.47%、5.66%和 71.76%,在纯工况下,同样指标的均方根值分别下降49.08%、22.78%和 87.19%,表明了主动悬挂车辆转向状态更加稳定。在匀速转弯时侧向加速度均值的绝对值比联合工况大 8.6 倍左右,说明了匀速转向能够提供较大的侧向力进行转向。
参考文献(略)