1 绪论
1.1 研究背景及意义
管道作为运输手段,在石油、化工、国防、天然气、排污等多个领域应用广泛,通常运输水、天然气以及石油等常用气体和液体。这些运输管道极大的方便了人类社区,同时也带来了巨大的经济效益,但是这些管道常常需要大量的管道检测工定期的进行管道检测清洗和日常维护。管道在使用过程中因为年限较为久远、老化,容易发生堵塞、腐蚀、坍塌以及出现裂痕等各种缺陷,从而引发类似泄露、塌方的安全事故,对环境、社会经济以及人身安全造成损害。因此,对地下管道进行定期维护、检测工作是非常有必要的[1]。但是大部分管道主要埋于地下,少量管道悬空架设,因而管道缺陷检测受环境限制,传统的人工检测难度系数高,检测效率低。我国城市地下管道受历史和地理原因影响设备普遍分布不均、密度过大,极易受自然灾害的侵袭,尤其易受夏季暴雨的因袭,影响市民的正常生活威胁城市的正常运转。我国的降水分布不均,东南沿海地区降水量比较大,越往内陆,降水量越少,且降水主要集中在夏秋季节。2020 年 5 月广州地区持续降雨一周左右,由于排水系统的堵塞,以及预警的不及时,致使某小区地下车库被淹,近 400 辆车受损,至少造成 5000 万元以上的损失。业主们将物业告上法庭,引起一系列的纠纷。地下管道排水不及时,造成市民财产损失的同时也严重影响市民的正常生活,市民以及各政府机构也需要大量的精力处理后续问题。2016 年西安 7.24 特大暴雨,其最高水位超过一米,多处积水造成地铁站关闭;2012 年北京广渠门遭遇内涝,致使车主在二环路上生生在车里淹死了,而北京郊区山洪爆发,一泻千里,死伤众多。据统计造成79 人死亡,160 万人受灾,经济损失达 116.4 亿元。暴雨虽是天灾,然而如果有高标准的排水基础设施建设,管道堵塞路段的以及排查清理,地下排水的超负荷预警,可以减少部分财产损失,甚至生命危害。而造成积水原因是管线不配套、地面收水不及时以及管道淤泥未能及时清理。智能管道检测检测大量的推广建设,可以做到定期的管道检测和维护工作,清理障碍和沉积以免堵塞管道。
......................
1.2 国内外研究现状
1.2.1 管道缺陷检测技术的研究
用于管道检测的方法有很多,如声纳检测、超声波检、涡流法等,随着科技的提高和计算机的发展,智能检测也逐渐得到应用。管道缺陷智能检测大多利用管道机器人装载的摄像头或者智能传感器采集管道内的状况信息,然后通过有线或无线传输手段传送到智能检测平台系统中进行视频查看和智能缺陷检测。
1999 年加拿大的 O.Moselhi[9]等人针对管道机器人智能化程度不高,首次提出运用数字图像处理和模式识别技术,通过神经网络手段自动处理数字视频图像,从而实现基于图像的自动管道检测。2001 年国内的姜生元[10]等人提出了内置动力源X射线探伤机器人进行管道探伤,它以CCD视觉传感器进行管内定位,定位精度可达 5mm 左右,并且成功应用于“陕京”天然气管线的对接焊缝无损探伤。2005 年上海交通大学张云伟[11]等人提出了一种基于平行四边形轮腿机构、采用丝杠螺母调节方式的煤气管道检测机器人管径适应调整机构,设计了采用霍尔传感器检测管道和采用视觉传感器进行定位的管道机器人。2007 年英国的O.Duran[12]等人开发了基于激光的城市污水管道检测,运用神经网络实现管道图像进行自动缺陷分类和检测,但是这种方法有个很大的缺点,即不能获得完整的管道图像,对于管道缺陷的定位比较困难,不能对管道内表面进行三维重建。
2012年Motamedi[13]等人提出了一种新的采用数字图像处理技术用于城市管道腐蚀缺陷检测的新方法。2017 年曹建树[14]等设计了基于 LabVIEW 的激光超声燃气管道检测系统,解决从激光超声信号的激励到数据采集、信号分析处理和缺陷识别等技术问题,实现油气管道各类缺陷的快速检测的目的。2018 年董韶华[15]等开发了一个自动识别管道焊缝图像缺陷的软件,主要通过典型的图像边缘轮廓检测与阈值分割方法,构造了一个管道焊缝缺陷特征图库,然后运用 SVM方法实现图像缺陷的自动检测与识别。2019 年王庆[16]等在 Faster R-CNN 算法基础上,利用聚类分析方法改进候选区域设置,提出一种优化的排水管道缺陷检测模型。同年,吕兵[17]等提出了一种基于卷积神经网络的排水管道缺陷的检测方法,目的是提高 CCTV 视频中的管道缺陷检测的自动化和智能化,该方法在缺陷识别的准确率和召回率及识别速度上均满足了排水管道缺陷智能检测的需要,并且该方法在深圳市的排水管道检测中得到广泛的应用。
......................
2 管道缺陷类型与图像预处理
2.1 管道缺陷类型与难点分析
2.1.1 管道缺陷检测类型分析
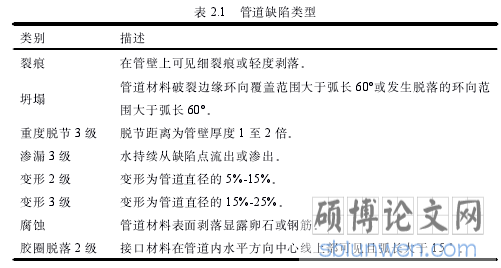
管道的缺陷类型有很多,如裂痕、坍塌、变形、脱节、渗漏、腐蚀、胶圈脱落、异物入侵、沉积物、障碍物、漂浮物、树根等。管道缺陷的自动识别,意指对管道的各种缺陷实时进行判别,即管道机器人在行走过程中遇到类似缺陷时,在视频图像上作出标记或者记录,并对严重程度进行评级。目前定义管道的缺陷种类如表 2.1 所示。
........................
2.2 图像噪声分析
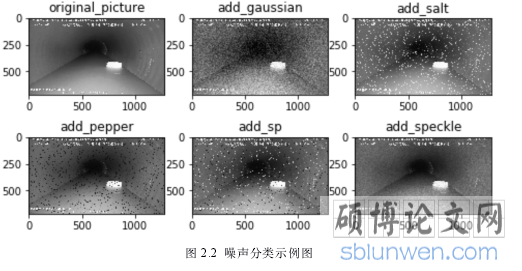
图像噪声一般是指存在于图像数据中的不必要或者是多余的干扰图像的信息,噪声的存在严重影响遥感图像的质量,如果在图像分类识别前进行预处理,或将提高图像的分类效果。管道视频的处理归根到底还是对每一帧图像的处理,其在录制过程中难免受到光线、信号等因素影响成像。下面将对视频图像的噪声进行分析,以便对图像进行针对性的去噪处理。
2.2.1 图像噪声模型
管道机器人实际采集的图像信息,受不同因素影响图像的质量,可称为噪声。噪声有不同的分类,噪声的密度不同,表现出的噪声模式就不同。常见的噪声有高斯噪声、椒盐噪声、瑞利噪声以及均匀噪声等[35]。下面根据其密度不同,给出其概率密度函数。
1、高斯噪声
概率密度函数服从高斯正太分布的这一类噪声称为高斯噪声(GaussianDistribution)。高斯噪声也称为正太噪声,它在空间和频域中基于数学上具有易处理性[35],且非常方便,因而这种噪声模型在实践中被经常用到。对于噪声的削弱和消除,一般可以用低通滤波器进行去噪处理。因而高斯噪声的削弱,可以用低通滤波中的高斯模糊去实现,例如利用 openCv 图像处理包中的cv.GaussianBlur 方法去实现高斯模糊。
.........................
3 管道图像检测与自动识别建模..........................20
3.1 深度神经网络原理................................... 20
3.1.1 神经网络分析...................... 20
3.1.2 深度神经网络结构分析..................... 21
4 管道缺陷目标识别与标注....................34
4.1 图像分割方法................................. 34
4.1.1 阈值分割标记法.................. 34
4.1.2 阈值差分标记法................................. 35
5 管道视频智能检测系统设计..................39
5.1 管道视频预处理建模............................
5.1.1 视频帧间差分法.................................... 39
5.1.2 行进速率自适应法............................. 40
5 管道视频智能检测系统设计
5.1 管道视频预处理建模
视频处理离不开视频解析,将其解析成一张张的图片输入模型进行识别分类,然而视频数据量一般很大,一小段管道的录制视频就达到百兆级别,对于服务器的负载压力是比较大的,因而对视频进行分段处理、视频调帧解析、视频差分处理是非常有必要的。另一方面,管道机器人在行走过程中,其行进速率是不一样的,因而将管道机器人的行进速率考虑进视频的解析因素中是必要的。
在对视频进行识别时,大多数是将每帧画面作为独立的一张图片进行处理,然后分别进行独立的识别操作。这种处理方式的特点是,当识别算法完成对一帧画面识别并输出结果之后,算法并不会保存这次识别结果,也不会尝试重复利用这次识别所获取的信息。并且当下一帧画面传入时,算法会对整幅画面重新扫描,重新识别。这一特点使每识别一帧画面之前已经计算过的结果都没有利用,因此在识别视频过程中做了大量的重复工作。 对于一段视频信息而言,相邻两帧之间甚至相近的很多帧之间都存在很强的关联性和相似性,如果能够利用这种前后帧之间的关联,可帮助识别算法在处理视频时少做很多重复性工作,并且节省计算资源提高处理效率。
.......................
6 总结及展望
6.1 总结
管道作为水、天然气、石油等常用气体和液体的运输手段,给工农业和人类社区带来方便和经济收益的同时,也需要大量的人工成本去进行管道检测和维护工作。管道在使用过程中容易发生堵塞、腐蚀、坍塌以及出现裂痕等各种缺陷,从而引发类似泄露、塌方的安全事故。采用管道机器人进行图像采集进行缺陷检测与识别将节省大量的人工成本。本文通过文献研究、构建深度神经网络,确定了研究问题,即基于 RGBD 视频图像的管道缺陷的自动检测和识别研究。通过文献分析总结了管道缺陷的检测技术发展状况和深度神经网络的发展状况,以及对卷积神经网络模型的性能做了分析。在通过研究,本文主要得出以下结论:
(1)通过文献分析法,明确了基于 RGBD 的视频管道缺陷自动识别的重要意义。通过归纳总结现阶段的管道检测技术、深度网络技术、图像处理技术以及机器学习领域的研究,对本研究的理论合理性、有效操作性和实用性进行了分析。其次明确了影响图片质量的噪声分类和噪声模型,并重点分析的去噪的方法,通过实验手段,明确了高斯滤波是高斯噪声的有效处理手段,中值滤波是椒盐噪声的有效处理手段。
(2)通过构建神经网络,对比了卷积神经网络的主流模型,通过损失率的对比分析,得出 AlexNet 模型或对管道缺陷图片的分类效果较好。并且提出扩充样本集后,模型训练的准确率提高了近 5%,模型的验证准确率提高了近 7%。
(3)本文分析了图像分割的两种方法,明确了自适应阈值分割对于图像处理有较好的优势。本文通过轮廓检测技术可以有效的对目标进行识别与标注,同时根据不同缺陷类型进行不同颜色的分类标注。
(4)本文提出了视频差分与行进速率自适应相结合的方法进行视频解析,对与缺陷识别的速率有辅助作用。本文设计了智能检测系统,实现视频缺陷的自动识别与检测,为管道缺陷的自动识别提供应对方案。
参考文献(略)