本文是一篇工程硕士论文,本文主要研究了螺栓点云分割算法,并尝试用多种算法实现点云分割目标。包括点云数据预处理技术,有坐标轴点云密度分析和点云滤波技术;传统点云分割方法,主要是基于RANSAC的平面拟合算法、基于投影点密度的立面提取算法。
第1章 绪论
1.1研究背景和意义
近年来,三维视觉领域有了很快的发展,各种三维模型及与之相对应的处理算法不断迭代更新,引起了许多研究者的关注[1]。三维几何模型的描述方法主要包括线框模型、曲面模型、实体模型等[2]。线框模型在早期计算机几何系统应用中较多,现代主要是辅助功能,该模型用点、线段、圆、圆弧、B样条曲线等简单曲线来描述几何目标,无法完全描述目标信息以至于很难实现图形自动隐匿,同时容易出现不定性问题;曲面模型主要采集目标的表面信息,可以描述形状复杂的几何形体,常用的表示方法包括:参数曲面、点云模型、网格模型、隐式曲面等;实体模型以曲面模型为基础,增加了实体表面某一侧的定义信息,可以较为完整的描述三维实体,但是在数据处理中维护这些复杂的信息会增加算法和算力的额外负担。
曲面模型分为显式曲面和隐式曲面两种模型,前者可以直接描述曲面形状,绘制容易,分割、提取等几何处理较为容易,但是模型拓扑变化的数据处理操作比较困难,后者则相反[3-5]。点云模型属于典型的曲面显式模型,该模型利用一系列离散点来描述目标的表面信息。点云模型的获取非常方便,很多现有设备都可以获得该模型,数据处理过程不需要考虑点的拓扑信息,处理过程简洁,很适合表示大规模数据。二维图像处理技术已经越来越成熟,在传统算法领域和深度学习领域都有很多表现较为优异的成熟算法。在计算机中, 二维图像由一个个像素点组成的,每一个像素点包含了被测物体的图像特征信息如RGB信息、灰度信息以及深度信息和坐标等。点云里的每一个点包含了包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等非常丰富的信息,在某个坐标系下的点的数据集又被称为点云,五彩缤纷的三维现实世界可以通过高精度的点云数据还原[6]。
............................
1.2点云分割技术研究现状
点云模型的区域分割就是指对点云中每一个点进行标记分类,即同一个分割区域类型上的点赋予同一标记,不同分割区域的点赋予不同标记,最终得到若干个互不相交的点子集,每一个子集中的数据同属于一个具有某些相同特征的分割区域曲面[7]。上述的“某些相同特征”一般指法矢量、曲率等微分几何特征。大多数散乱点云数据的分割相对于规则点云数据要困难得多,因为前者点与点之间的拓扑关系更为复杂,要设计有效的分割算法是一大难点。点云数据的分割包括以下关键点:确定与人类视觉感知相一致的几何形状特征;快速、准确地提取点云的拓扑结构和几何特征;确定点集边界;分割算法对旋转和平移等操作的鲁棒性[7-10]。
目前散乱点云数据的分割方法主要有基于边的方法、基于面的方法、基于聚类的方法、基于深度神经网络的方法和混合方法[11-15]。
基于边的区域分割方法是指通过分析点云的局部几何特征确定边界点,然后通过边界点将点云分割成若干个不同的区域,该方法认为法线、曲率等几何特征突变的点即为边界点,至今出现的各种分割算法都是围绕这些特征进行设计的[16]。有研究者提出将点云数据在三维空间中进行栅格划分,然后利用八叉树数据结构对栅格内数据进行细分,计算栅格内点的法线标准差值至小于预先设定的阈值,这时将边长较小的栅格合并即可得到棱边,进而实现区域分割[17]。该方法的优势在于运用了八叉树细分点云数据,算法效率有了极大提高,然而只使用了法线这单一的几何特征,算法还有极大的提高空间。也有研究者提出基于曲率的区域分割方法[18],即通过计算点的曲率,将曲率突变的点作为边界点对点云数据进行区域分割,该方法的优劣性与上一种方法相似。一种基于空间栅格的区域分割方法[19]用二次抛物面模型计算点的曲率,将点云数据用栅格划分后,根据栅格中的点与栅格中心点的相对位置来计算栅格的曲率以及栅格间的曲率变化,由曲率变化提取特征栅格为边界来分割区域。有研究者在研究分析曲面特征与曲面微分几何特性关系的基础上,用二次曲面拟合的方法来估计三角网格模型各顶点的主曲率和主方向,提取三角网格模型的特征线,该方法认为如果顶点在某一个主方向上的主曲率为极值则该顶点为特征点[20]。
...........................
第2章 点云螺栓获取系统和数据预处理
2.1 无人机点云获取系统介绍
2.1.1 项目背景介绍

工程硕士论文参考
本论文研究内容为实验室与中国铁建电气化局集团有限公司合作进行的基于无人机的高铁线路高大桥墩支柱基础接口检测智能化装备设计项目,该项目已于2022年8月完成样机实地测验交付和项目结题。
如图2.1所示,高铁线路高大桥墩分布在水域或者山坳等特殊环境下,现场实施人员为检测支柱基础接口的高度、直径以及其相关的中心距,需要搭设攀爬工具,然后人员攀登到高大桥墩顶端进行作业,之后作业完成再撤掉攀登工具。 其中高大桥墩支柱基础接口的检测亟需提升作业方式的主要原因:
(1) 作业难度大,危险系数高作业人员在攀登高大桥墩和从高大桥墩下行过程中,容易发生危险,存在严重的安全隐患
(2) 测量周期长,整个准备工作复杂且难度大,需要占用大量的人力和时间,影响项目施工进度。
.....................
2.2 数据介绍和噪声模拟
2.2.1 数据介绍
工程硕士论文怎么写
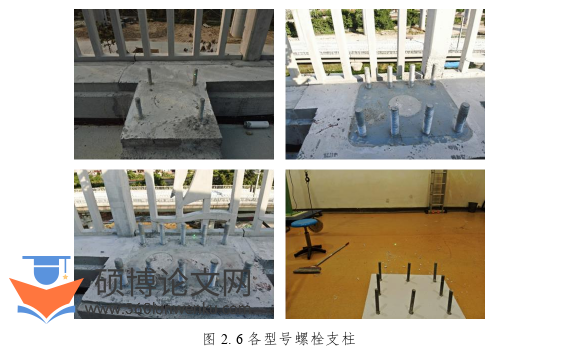
如图2.6所示,主要型号的铁路螺栓支柱有四种,本文将研究针对多种螺栓支柱的点云螺栓提取分割。其中左上角是在阴天拍摄的16号螺栓支柱,右上为晴天中午拍摄的4号螺栓支柱,左下为晴天傍晚拍摄的14号螺栓支柱,右下为室内条件拍摄的8号螺栓支柱实验室模型,不同光照条件下的螺栓点云图噪声不同。本文做测试的螺栓点云数据集为图2.6所示四种型号螺栓支柱分别在上午和下午拍摄的点云图,以及分别通过加权高斯模型添加噪声后的点云图,总计24张点云图。
..........................
第3章 基于波峰波谷分析法的点云螺栓分割......................... - 29
3.1 前言...................................... - 29
3.2 基于RANSAC平面拟合算法定位支柱平台 ...................... - 29
第4章 基于DBSCAN聚类的混合点云螺栓分割算法 ..................... - 36
4.1 前言.............................. - 36
4.2 基于DBSCAN聚类的单一螺栓点云分割方法 ...................... - 36
第5章 总结和展望............................... - 65
5.1总结................................ - 65
5.2展望........................................ - 66
第4章 基于DBSCAN聚类的混合点云螺栓分割算法
4.1 前言
第3章对点云基础分割方法主要有基于边的方法、基于面的方法进行点云螺栓分割实验研究,主要是波峰波谷分析法去除背景干扰、基于RANSAC平面拟合算法拟合螺栓支柱平台、基于投影点密度的立面提取算法。本章研究基于聚类的点云分割方法,主要是基于DBSCAN聚类的单一分割方法和混合分割方法。由第3章第3节知将点云数据中所有点投影在y=0的平面上,螺栓位置处点密度明显高于其余位置,因此可以尝试用密度聚类算法DBSCAN进行聚类实现点云分割。仅用DBSCAN聚类算法进行螺栓点云分割是在波峰波谷分析去除背景以及滤波之后进行的,本章尝试了基于DBSCAN聚类的混合分割方法以适应有背景的点云图,同时由于铁路现场环境复杂,无人机携带深度相机对螺栓支柱进行拍摄时需要旋转角度进行拍摄,针对多角度拍摄的点云图本章提出了自适应多角度分割算法。
..........................
第5章 总结和展望
5.1总结
本文主要研究了螺栓点云分割算法,并尝试用多种算法实现点云分割目标。包括点云数据预处理技术,有坐标轴点云密度分析和点云滤波技术;传统点云分割方法,主要是基于RANSAC的平面拟合算法、基于投影点密度的立面提取算法。并提出了基于DBSCAN密度聚类的单一分割算法和混合分割算法,能够较好实现螺栓点云分割和提取,支持多角度拍摄点云螺栓,能适应多光照条件下的点云图,通过预先保存关键参数实现铁路多型号螺栓支柱的螺栓分割。
本文提出了波峰波谷分析法去除干扰和背景点以及综合运用半径滤波、统计滤波、导向滤波、均值滤波和中值滤波、曲率下采样等点云滤波算法去除因光照产生的点云噪声。现场采集的原始点云图存在干扰点,这些干扰点的分布有一定的规律性,在Y轴方向点云数统计存在单高峰,Z轴方向点云数统计存在双高峰,利用这种分布规律经过波峰波谷法分析可以去除干扰和不必要的背景点。去除背景和干扰点云团后,点云仍然存在一些噪声。首先使用导向滤波,导向滤波在维护边缘特征的同时对点云图中的游离噪声团和螺栓后的噪声尾翼效果不好,之后为了将离散点云噪声聚集成簇,也为了增加边界处的点云密度,采用中值/均值替代法,之后考虑半径滤波去除点云噪声,但是仍然有离散点云噪声簇存在,此时综合考虑全局密度特征,采用统计滤波,最后通过曲率下采样方法以曲率为基准区分特征区域和非特征区域,并对特征区域全部保留,对非特征区域稀疏采样。
参考文献(略)