本文是一篇工程硕士论文,本文以运动乒乓球为研究对象,开展动态目标定位及运动轨迹预测研究,搭建了系统测试平台,进行了算法研究和实验验证。
1绪论
1.1研究背景和意义
随着深度学习和机器视觉等技术的快速发展,军事、交通、体育、工业等领域对于移动目标定位与轨迹预测方面提出了更高的要求。在军事领域中,飞行器的识别和预测其飞行的轨迹、预测炮弹的落点位置和空中导弹拦截有着重大的价值,而且对提高国家安全和军事发展有着更重要的意义。在交通领域中,识别与定位障碍物、移动障碍物的轨迹预测和辅助驾驶的轨迹规划都是自动驾驶应用和研究的热点。在体育领域中,球类运动目标的实时轨迹采集与预测,能够对运动员战后复盘,学习战术有极大的帮助。在工业领域中,利用工业机器人对移动物体进行实时识别抓取作业,提高工业生产的技术水平,减轻人工的负担。如图1.1所示。

工程硕士论文怎么写
........................
1.2国内外研究现状
1.2.1动态目标识别技术现状
动态目标识别是将运动的前景目标从背景中抽离出来,融合了图像处理、模式识别和人工智能等众多领域的先进技术,是计算机视觉技术的一个研究热点[1]。动态目标的背景分为动态背景和静态背景,室内外环境较为复杂,不同角度太阳光的照射,颜色大小不一运动的云层,地上快速行驶的车辆,频率较低的日光灯,与目标物颜色接近的静态背景等等复杂因素都会给动态目标识别带来巨大的影响,导致识别率下降,无法检测出动态目标。除此之外,研究过程中还会遇到目标速度快、物体形状发生变化、图像信噪比极低等情况,针对这些问题,复杂背景下运动目标识别极具挑战并且非常有意义。
动态目标识别主要分为传统视觉识别和深度学习识别两种方式。传统视觉算法侧重于特征提取,识别颜色、面积、圆度、长宽比、角度和长度[2-7]等容易数值化的特征,为动态目标识别算法研究做了良好的铺垫。1981年,Berthold[8]提出光流法,利用视频流中相邻图像序列的像素在时间域上的变化和在相邻帧之间的相关性,找出前帧之间的对应关系,根据像素的位移获得目标物的位移。2004年,Piccardi[9]提出帧差法,将相邻两帧或三帧图像进行差分运算,将不同帧的像素差分结果与设定的阈值进行比较,超过阈值的设为运动目标像素。2011年,Brutzer[10]提出减背景法,将当前帧图像与一个不断更新的背景模型相减,在差分图像中提取运动目标。2022年,丁文龙[11]采用三帧差分法获得两幅差分图像,再利用阈值分割得到二值图像,经形态学的膨胀、腐蚀处理得到新的二值图像,得到最终的运动目标图像,解决动态目标的“空洞”问题;宫金良[12]提出一种基于多区域信息融合约束的改进帧间差分法,优化改进的目标检测与跟踪算法,构建两次区域限定与Kalman滤波算法融合的检测方法,克服帧差法识别目标细节粗糙的缺点。但传统识别方法较大程度会受到环境因素的影响,需要根据实际场景制定出方案,面对特殊缺陷检测或多目标检测适应性较差。
...........................
2运动乒乓球识别定位与轨迹预测系统的整体设计
2.1系统需求分析
乒乓球比赛中球的弹跳前轨迹、落点位置、弹跳后轨迹都是运动员判断最佳击球位置的重要信息,同理乒乓球机器人也需要采集乒乓球的运动轨迹进行最佳击打位置预测。乒乓球机器人依靠视觉系统进行运动轨迹提取,视觉系统容易受复杂光照、遮挡等因素的影响。
当使用黑白相机构成视觉系统的乒乓球机器人放置在白色背景较多的场馆中,白色的乒乓球或者高光下的黄色乒乓球便会因场馆中光线问题,在相机采集到的图片中与背景墙融于一体,难以识别,使目标识别算法准确率下降,造成漏检的问题。如图2.1所示为在复杂场景中的白色乒乓球。
采用双目定位的方法对乒乓球进行定位的视觉系统会因目标物小、背景相融、遮挡等问题易造成相机未检测到目标。乒乓球运动过程中,当其中一个相机采集到的图像未被识别,双目定位方法便失效,定位信息产生较大的误差;当两个相机都未检测到目标,同一时间序列的轨迹信息便会漏帧。当采集的轨迹信息误差较大时,预测轨迹信息的误差也将会变大,影响最佳击打位置的判定。
选取合适的算法融入系统具有重要的意义。相对于传统的视觉识别方法和运动轨迹预测方法,传统的视觉检测方法难以检测复杂背景下的小目标物体,传统的轨迹预测算法只能解决前后帧短时间的轨迹信息预测。随着深度学习的快速发展,提出更多准确率高、效果好的深度学习算法,但很多算法时间复杂度和计算复杂度较高,难以达到系统的实时性问题,因此需要对选取的算法进行改进提高算法准确率和计算速度。
...........................
2.2系统总体设计
2.2.1系统软件结构设计
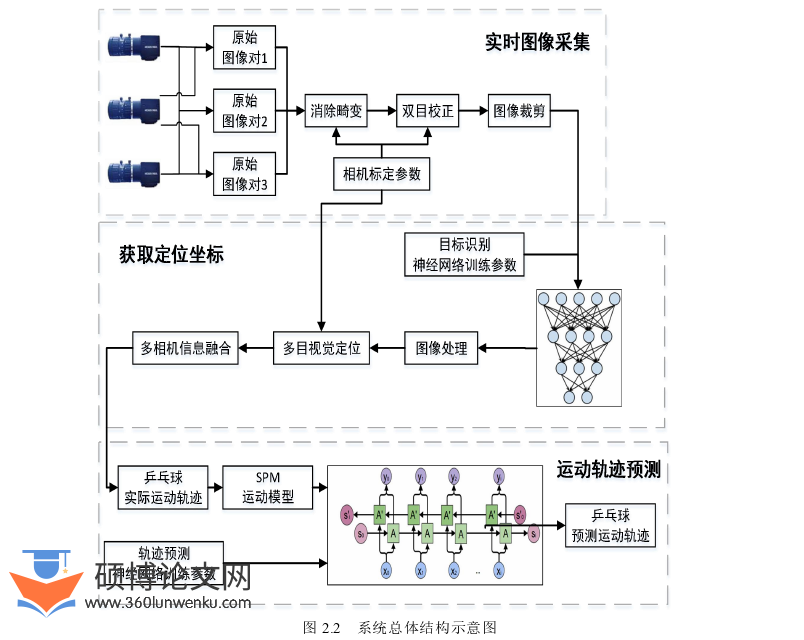
运动乒乓球定位和轨迹预测系统主要由实时图像采集模块、坐标定位模块和轨迹预测模块构成。
1)实时图像采集模块。将三目相机进行两两配对,获得三对双目相机。然后分别对每个双目相机进行标定,得到每个双目相机的内外参数、单应矩阵,根据标定结果对原始图像进行校正,校正后的两张图像位于同一平面且互相平行。由此每获取一帧图像可采集到三对立体图像对。
2)坐标定位模块。利用训练后的Yolov4-tiny神经网络结合.NET开发动态乒乓球识别平台,以提取乒乓球图像中心点像素坐标,将获得图像像素坐标映射到世界三维坐标,每帧获取三个坐标。运用一种多相机信息融合策略,将每帧获取到的三个世界坐标进行融合,克服因单个相机故障出现缺检漏检的问题。
3)轨迹预测模块。利用训练后的SPM-GRU神经网络结合.NET开发动态乒乓球轨迹预测平台,将同一时间序列一定数量清洗后的轨迹数据作为输入,输出量为未来的轨迹数据。系统总体结构示意图如图2.2所示。
工程硕士论文怎么写
......................
3运动乒乓球识别定位算法研究 ............................. 16
3.1 目标识别算法 .................................... 16
3.1.1 YOLOv4-Tiny 模型结构 ............................. 16
3.1.2 改进 YOLOv4-Tiny 模型结构 ................... 17
4 运动乒乓球轨迹预测算法研究 ......................... 38
4.1 乒乓球运动模型 ................................... 38
4.2 GRU神经网络 .................................... 42
4.3 结合物理模型的神经网络 .................................... 42
5 运动乒乓球识别定位与轨迹预测系统开发与测试 .......................... 51
5.1 系统逻辑结构设计 ....................... 51
5.2 系统开发环境 .................................... 52
5.3 系统模块设计 .................................... 53
5运动乒乓球识别定位与轨迹预测系统开发与测试
5.1系统逻辑结构设计
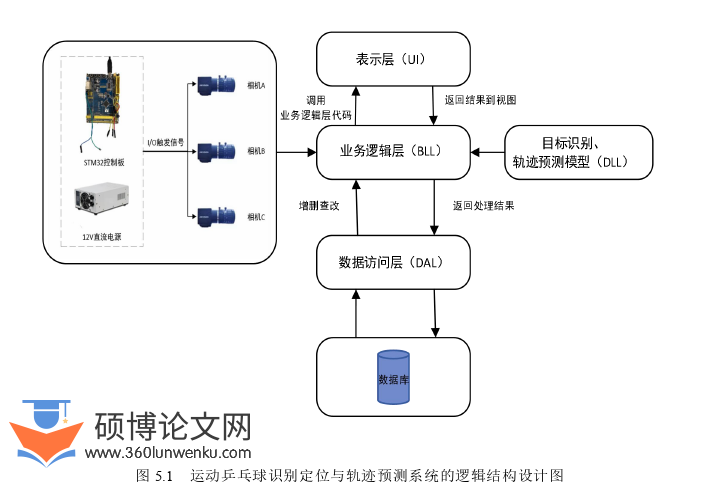
课题针对运动中的乒乓球的空间坐标定位和轨迹预测的需求进行充分的分析,希望能设计一套运行流畅、实时反馈目标信息的系统,并且能够储存实验中需要的超参数和实验数据。运动乒乓球识别定位与轨迹预测系统的逻辑结构设计图如图所示。
工程硕士论文参考
1)表示层
表示层是系统的视图层,能够实现数据实时展示功能。用户通过Winform界面中各个控件的响应事件调用业务逻辑层中对应的函数,将表示层中输入的数据传入函数,实现相应的功能。通过函数的返回值获得处理完的数据再传递给表示层作展示。
2)业务逻辑层
业务逻辑层封装了各功能模块所需的函数,能够通过控件的响应事件获取表示层中的信息数据,根据函数的调用先后顺序依次调用对应的函数,实现信息或数据的处理,处理完后通过返回值传递至表示层。硬件设备中采集的图片信息直接传入业务逻辑层,通过事件响应依此对图片信息进行处理。
.......................
6总结与展望
6.1总结
运动目标空间轨迹研究具有重大研究意义,以乒乓球为研究对象,基于运动乒乓球识别定位与轨迹预测系统进行运动乒乓球三维轨迹预测研究,最终稳定、实时、精确的预测出乒乓球的运动轨迹。
主要工作如下:
(1)针对传统算法难以处理移动目标背景复杂、光照变化、目标小、速度快等问题,开展了移动目标识别与定位算法研究。首先进行图像采集并制作数据集,构建了一种改进型的YOLOv4-Tiny模型用于目标识别,改进了多尺度特征融合,增加至三路特征值,使用了路径聚合模块对输出特征反复增强,提高了模型在复杂背景下小目标的适应能力;然后使用图像处理和三维重建技术获取乒乓球空间中心三维坐标,为提高目标定位精度,提出一种基于动态权重的多相机信息融合算法,将三组坐标值进行融合求解当前帧空间坐标,将同一时间序列的坐标信息依据时间顺序输出为轨迹序列;最后搭建了移动目标测试平台,进行了算法的测试验证。实验结果表明:改进后YOLOv4-Tiny模型检测精确度和召回率分别达到98.40%和99.36%,实时检测速度为82fps左右,满足了运动乒乓球移动目标识别模型精确度、召回率满足识别精度和实时性的要求,并保证了平均误差为10mm的乒乓球定位精度,提高了轨迹预测的速度和准确度,达到了轨迹定位精度的要求。
(2)针对运动乒乓球轨迹预测问题研究,为解决解决传统物理模型中长时间记忆信息缺失的问题,提出了一种传统物理模型和GRU神经网络相结合的轨迹预测模型。首先对乒乓球进行受力分析,搭建了一个乒乓球轨迹预测的物理模型,将采集的乒乓球轨迹数据传入物理模型进行数据扩充并制作自己的数据集。然后对GRU神经网络进行改进,使网络不仅能解决长期依赖问题和梯度爆炸的问题,还可以增强上下文信息的融合。随后提出了一种新的轨迹预测模型SPM-GRU,将提取的轨迹数据传入受力分析的物理模型进行数据扩充,扩充后的数据传入改进后的GRU神经网络,最后获取预测的乒乓球轨迹。实验结果表明:结合后的轨迹预测模型SPM-GRU具有良好的预测精度和稳定性。
参考文献(略)