本文是一篇工程硕士论文,笔者认为深度学习对基于视觉的车道线检测技术的发展产生了深远的影响,而车道线检测算法在深度学习方面需要大量的数据集作为支撑,且神经网络模型具有不可解释性,使得车道线检测技术在稳定性上仍有待加强,本论文的深度学习方面算法同样存在此问题。
第 1 章 绪论
1.1 研究背景与研究意义
自 19 世纪汽车问世以来,汽车产业快速发展,而我国自改革开放开始,汽车产量迅速增长。由公开数据可知,截止到 2021 年初,我国汽车保有量已近 3亿辆。由此汽车得以广泛应用,使生活便利许多,然而,交通事故数量也逐渐增多,对人们的生命安全造成了重大威胁。2019 年公安部公布的相关数据显示:该年1到10月期间,因不守交规而造成的交通事故中,共计58675人受伤,9656人死亡。为了尽可能降低人为因素对交通的影响,可从提高汽车的安全系数等方面入手。具体而言,即对于汽车安全系统,通过先研究,再完善,最后推而广之的方式,可以提升汽车的安全系数,以渐进式地达到无人驾驶车辆的程度,最终彻底屏蔽人为方面因素的影响。依据大量实车试验数据验证,当行车时,ADAS 等系统能够一直协助驾驶员,以尽可能减少交通事故。近期,类似于ADAS 的先进辅助驾驶系统不断涌现,此类系统逐渐成为研究者的研发重点,用作智能车载。当驾驶员驾驶车辆时,此种系统可以做出及时提醒。采集数据时,需要依赖车载传感器,如激光雷达、相机等,数据经处理后,系统将对交通现状进行识别,在紧急情况下,能够协助驾驶员做出决策。综上可知,该类系统不仅可以使驾驶员驾驶汽车时更舒适,还能够避免发生交通事故,减少事故伤害[1]。
智能技术的飞速发展,催生出智能车辆。自 19世纪 70年代以来,有少数国家将对智能车辆的研究提上日程。1989 年 5 月期间,NavLab 系列智能车辆由美国卡内基·梅隆大学研成,其具有智能车辆开山之作的意义,该系列智能车辆首先依赖多个车载相机采集路况数据信息,然后使用计算机分析收集到的信息,得到分析结果后,发布指令控制智能车辆的速度及方向。2015 年,英国同样研制了智能车辆。该智能车辆名为 Lutz Pathfinder。对于 Lutz Pathfinder,该智能车辆可以进行如下任务:搭载两人及其行李;同时,时速能够达到 24 公里,行程最远能够达到 64 公里。中国是世界上智能车辆研究较早的国家之一,国内首辆智能车辆的研制,由国防科技大学于 1992 年完成[2]。2011 年,国防科技大学完成另一智能车辆研发,即 HQ3。测试时,该智能车辆从长沙杨梓冲收费站出发,沿京港澳高速公路行车,目标地点为武汉。
............................
1.2 国内外研究现状
车道线检测影响着智能车辆的诸多方面,例如基于车道的导航和高清地图建模等[4]。另外,相较于激光雷达检测,工业相机有如下优点:价低且鲁棒性较强;此外,对于环境感知的不同阶段,均可由计算机视觉实施处理[5]。而基于视觉的车道线检测算法主要分为两类:基于传统方法与基于深度学习。在车道线检测领域,对于传统方法,通常可由如下三个步骤组成:首先,对图像进行预处理,以消除噪声干扰,研究者一般选择对车道线图像进行逆透视变换,或者划分出感兴趣区域(ROI);然后,实施特征信息提取;最后,进行车道模型拟合,从而识别出车道线。
在车道线检测领域,对于新兴的深度学习方法,与传统方法比较,其准确率明显提升较大,该方法通过神经网络模型的方式,自主学习特征信息,此外,具备较高的泛化能力。近年来,在计算机视觉方向上,基于视觉的车道线检测在深度学习方法下一般分为检测与分割这两种方式。两者的共同之处是将预处理后的车道线图像进行标记,然后在构建好的神经网络模型中进行训练、测试以及验证,模型不断得以优化,进而获得较为精确的车道线检测模型;不同在于:检测是指确定位置的分类,只需框出检测目标;而分割的方法需要进一步判断,辨别出特定像素属于何种目标。
................................
第 2 章 深度学习与实例分割
2.1 深度学习
深度学习,即深度神经网络,一般用于处理海量的数据,能够对信息进行表征学习,可视为机器学习的分支[33]。深度学习可以获得图像信息的潜在分布规律和特征,这依赖于将图像的底层低纬度特征信息进行重组后,生成更高维度的特征。卷积神经网络是本论文主要使用的深度神经网络,用于实现基于实例分割的车道线检测算法。因此,下一小结将叙述卷积神经网络的构成与作用等内容。
2.1.1卷积神经网络
卷积神经网络(CNN)至少包含一层卷积层。卷积层通过卷积运算的方式进行运算,而不是利用矩阵乘法进行运算[34],最早由 Alexander Waibel提出,该网络通常拥有多层次结构。CNN 通过卷积运算提取特征,由权值共享、池化等方式减少参数,降低计算量[35],最后完成分类、检测、分割等图像处理任务。虽然卷积神经网络在算法如何学习,如何构建网络等方面起着巨大作用,但是,研究人员对于此类深度神经网络的运作方式的认识,仍不够全面。一直以来,因为研究人员难以深入地认识所有训练得到的深度神经网络,一些特定的神经网络也同样如此,无法知晓其如何利用大量非线性部分,并使之相互作用,所以,深度神经网络有个别称,即为“黑箱子”。
对于 CNN 的网络结构,可视其为层次模型,依次为输入层,隐含层,以及输出层。其中,隐含层一般含有卷积层、池化层、激活函数及全连接层等。CNN 的具体训练过程简述如下:首先,将所有权重初始化为随机值;然后,使输入的训练图像经过上述网络层结构,并获取所有输出类的概率;再而,对于输出层,获取总误差后,利用反向传播计算误差相对于权重的梯度;最后,通过梯度下降法更新所有权重,使输出层的误差趋于最小。
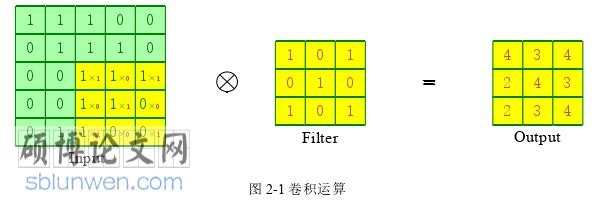
卷积层就卷积(Convolution)而言,在原始图像中,针对某邻域,对其做卷积运算,从而得到邻域特征[36]。卷积运算是指选择卷积核,使之与图像中对应的部分像素值,相乘再相加得到和,即为图像在此小区域的特征值。其中,可将卷积核看作权值矩阵。对于特征面,其中包含多个神经元,再由特征面构建卷积层。在 CNN 中,神经元与卷积核相互关联。
工程硕士论文怎么写
..........................
2.2 实例分割
深度学习中,图像分割一般分为两类,即语义分割和实例分割[41]。二者不同的地方在于:就语义分割而言,对于图像中的物体,均归纳出其对应的类别,则可完成像素级别的分类,因此该方式能够判断输入图像中的各像素点是否属于同一类物体;而实例分割则是在前者的基础上,再辨别出同类物体中的不同个体。
2.2.1实例分割发展与演变
针对目标检测领域,Ross Girshick 等人[42]在 2014 年提出 R-CNN,将 CNN引入其中,改善了检测效果。该算法主要利用两种重要方式达成目标检测:(1)训练数据不充分时,针对辅助任务,若实施有监督的预训练,并通过特定于域地微调,则能够明显地提高算法性能;(2)当定位、分割目标时,为方便起见,在自下而上的候选区,使用的是 CNN 结构。第一步,R-CNN 通过 Selective Search 这一方法,对于可能含有目标的候选区域,将其提取出来;其次,仅针对上述区域,选取 CNN,对目标提取特征,之后判别检测到的特征点是否属于同一类,对于物体的特征信息,应将其放入 SVM 分类器中,实施判别;最后,针对候选框位置,由回归器细微修正。
2015 年,Ross Girshick[43]基于 R-CNN 提出 Fast R-CNN,VGG16 网络是其主体网络。与 R-CNN 相比,其测试速度与训练速度均加快了,分别快了 213 倍和 9 倍,并解决了 R-CNN 存在的其他一部分问题,比如,训练时需分多步进行、耗时长、测试慢等,与此同时,也提高了目标检测的精度。Fast R-CNN 不是像R-CNN 那样单独训练模型的各个部分,而是使用端到端的训练方法,同时学习特定类的 Bbox(Bounding box)回归和 Softmax 分类器,以避免出现过度消耗存储空间的问题。Fast R-CNN 采用共享卷积和 ROI pooling 的方法来提取 region proposal 的区域特征,能够对训练进行加速。
Faster R-CNN由 Ren Shaoqing等人[44]提出,该网络可以近乎零成本地提取候选框,其采用的 RPN 网络能够和检测网络共享输入图像的特征信息。RPN 为全卷积神经网络(FCN),能够在图像中所有的位置上,同时推断出目标边界及目标分数,在该算法中,将其与 Fast R-CNN 相结合,实现目标检测。RPN 与 Fast R-CNN 在该网络模型中为单一网络,主要是通过两者共享卷积层,即 RPN 中的卷积特征信息,这一方式实现的。
.................................
第 3 章 基于 BiSeNet V2 网络模型的车道线检测........................21
3.1 数据集的相关介绍与制作 ............................21
3.1.1TuSimple 数据集...............................21
3.1.2KITTI 数据集.......................................21
第 4 章 基于改进概率霍夫变换的车道线检测..............................43
4.1 图像预处理 ..................................43
4.1.1 提取感兴趣区域 ..................................43
4.1.2 灰度化处理 ................................44
第 5 章 车道线检测评估方法及算法比较............................53
5.1 车道线检测评估方法 .............................53
5.2 算法比较 ....................................54
第 5 章 车道线检测评估方法及算法比较
5.1 车道线检测评估方法
尽管车道线检测研究对于智能车辆发展至关重要,然而,多数研究成果没有开源。因此,暂时评估数据库未统一,无法用来估测车道线检测算法的优劣,特别是基于深度学习的算法于基于传统算法之间的算法比较。在不同的算法之间,没有相同的评判依据,无偏差地评估算法优劣,实际上并不可能。多数车道线检测算法的准确性估测,仅由乘员给出,即成功检测出车道线的概率,或者通过目测,粗略断定检测的准确性,未将准确性量化。
针对车道线检测算法,在现有文献中,关于其优劣测算,没有标准化指标。因此,在参考了文献[74]后,在准确性方面,本论文统一了评估指标:横向偏移;此外,提出实时性标准。在实验过程中,检测结果所标出的位置相对于真实的车道线位置,可能具有一定差异。所以,上述差异值能够作为标准,对结果的准确性进行评估。横向偏移(Lateral Distance,LD)的相关公式则得以定义。
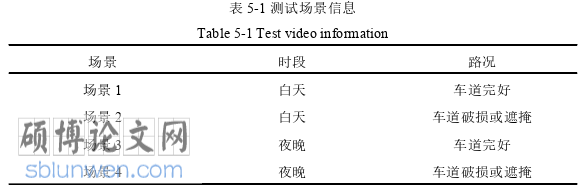
本节为利用上述评估指标,衡量算法的性能,选择四个具有代表性的场景,处于不同时段,包含了各路况以及各种路面干扰,如树木或建筑阴影,车道线破损,车辆遮掩等。具体情况如表 5-1 所示:
工程硕士论文参考
...............................
第 6 章 总结与展望
6.1 工作总结
如今,在人们的日常中,汽车已经普遍存在。对于车辆安全方面的需求,也就越来越高。在此方面的安全技术中,车道线检测技术拥有重要地位,而深度学习的迅速发展,为该技术提供了工程实践化的可能性。车道线检测算法要求极好的鲁棒性和实时性,使汽车能在各种行车环境中保持快速且精确的判断。当前基于视觉的车道线检测算法中,研究人员逐渐转向基于深度学习的方式,主要是通过引进卷积神经网络,以处理复杂多样的行车场景。本论文采用了基于深度学习的车道线检测方法,主要工作总结如下:
(1)大多车道线检测算法只是通过视频仿真测试来验证,并未工程实践化,与实际效果往往大相径庭,本论文提出了基于 BiS eNet V2 神经网络模型的车道线检测算法,将其在 6 个不同的数据集上进行测试,并与其他神经网络模型进行算法比较,最后通过 ROS 将车道线检测集成化,实验结果表明该算法具有较好的实际应用价值;
(2)改进了基于概率霍夫变换算法的车道线检测,将边缘类型分为断裂边缘和连贯边缘。对于断裂边缘,在局部霍夫空间能够反复使用的情况下,利用其中的累加器实施投票,该方式降低了计算量,减轻了内存消耗。对于连贯边缘,通过一维累加器,即可实现直线判断,然后,根据序号顺序向前向后搜寻,针对相邻采样点,确定直线端点的位置,加快了检测速度。最后,将其工程实践化;
(3)提出的车道线检测评估方法包括准确性与实时性两项标准,其中准确性标准包含准确率和横向偏移等指标,利用评估标准对本论文提出的基于深度学习的车道线检测算法与传统方法中的代表性算法进行比较,表明了基于深度学习(BiSeNet V2 神经网络模型)的车道线检测算法性能优于改进后的概率霍夫变换算法,前者的准确率约为改进后的概率霍夫变换算法的 3.9 倍,检测速度约为其 2.9 倍。
参考文献(略)