本文是一篇职称论文,本研究针对复杂城市环境下无人机集群飞行面临的多机耦合制约、冲突风险频发和运行效率低下等难题,提出了城市低空无人机飞行计划协同推演与最优调配方法。首先,面向无人机“个体”,考虑无人机与城市静态环境目标之间的冲突问题,构建了基于概率风险地图的无人机三维路径规划方法,实现了无人机飞行计划“初始生成”;
随着无人机自动化程度的不断提升,分布式操控运行体系日益完善,民用无人驾驶航空迅速迭代成为了先进生产力的重要载体。作为数字低空技术的主要承担者,无人机广泛应用于国防军事[1]、基础建设[2]、农林渔牧和体育娱乐等领域。2022年,民航局发布了《民用无人驾驶航空发展路线图V1.0》,奠定了无人机服务智慧民航建设、促进行业创新发展和加快应用有序落地的发展方向,指明了其数字化、智能化、多元化的未来趋势,依托于低空经济,无人机行业的核心竞争力与日俱增。无人机独特的高机动性、高灵活性和强自主性在某种程度上限制了行业发展,对低空空域的规划与管理往往受制于这些优势特性带来的安全问题。在无人驾驶航空逐渐融入国家空域系统的大背景下,无人机运行安全不仅仅局限于低空领域,还会影响以民用航空、军事航空为首的传统空域使用者。一体化编制和调配无人机群体在城市低空环境内的整体飞行计划,从根源层面确保无人机安全高效运行,已成为未来城市空中交通管理领域亟待重点攻关和优先解决的重要难题。
1 基于风险地图的城市低空无人机飞行计划初始生成
无人机初始飞行计划主要面向无人机“个体”。由于每架无人机均有各自独立的飞行任务,首先需要进行全局性的飞行路径规划。为了高效生成多条综合成本较低的飞行路径,此时不考虑无人机与无人机之间的飞行冲突问题,主要考虑无人机与城市静态环境目标(如障碍物、禁飞区、临时起降点等)之间的冲突问题对单架无人机飞行进行避障规划。在进行飞行路径的避障规划过程中,以最小化潜在风险和最短距离为目标,使用JPS(Jump Point Search)算法搜索路径最优解,为每一架无人机生成无冲突的参考路径。本节重点基于风险地图构建了城市低空无人机飞行计划初始生成方法,具体如下:
1.1 城市低空概率风险地图生成
首先,选取30米为最优栅格粒度对空域进行离散化处理,即(X ×Y ×Z ×l),l=30米,将空域离散化为30m×30m×30m的标准栅格,所选空域大小为3000m×3000m×150m。
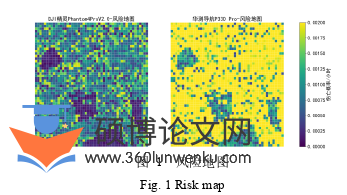
不同下降模式之间的碰撞事件是独立的,当κ=1时无人机下降模式为弹道下降,当κ=0时无人机下降模式为失控滑行。最后,以南京市江宁区相关区域为研究对象,人口分布来自LandScan全球人口密度空间分布数据,利用OpenStreetMap数据提取南京市江宁区城市三维模型,生成无人机飞行障碍数据,对多旋翼无人机(DJI精灵Phantom4ProV2.0)和固定翼无人机(华测导航P330 Pro)进行500次蒙特卡洛模拟试验,在不同下降模式下进行风险评估,取伤亡概率的平均值生成最终的风险地图,基于概率生成最终的风险地图如图1所示。
职称论文参考
1.2 基于风险地图生成无人机初始飞行计划
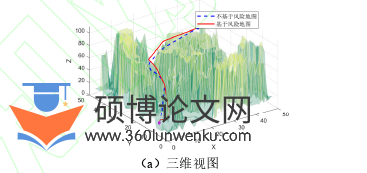
在考虑风险地图的前提下进行无人机三维路径规划,其中,任务1从出发点(4,11,8)到目的地(40,37,85),任务2从出发点(15,38,0)到目的地(43,7,106),并将其与不考虑风险的实验结果进行对比,结果如图2和图3所示。初始路径的具体评价指标如表1所示,其中“转弯数量”为无人机飞行路径发生明显改变的转折点数量。
分析两种条件下的实验结果,在基于风险地图的情况下,整体节点的伤亡概率明显降低,两次任务中伤亡概率大于平均值的节点数量均由8个减少到4个,相应的路径长度仅增加了3.74%和6.29%,整体路径节点的伤亡风险明显降低,有效保证了无人机运行安全。对比不采用风险地图的情况,基于风险地图的方法需额外考虑路径节点的潜在对地风险,算法时间约分别增加了3倍和7倍;路径包含的转弯数量得到了明显优化。
本节提出了基于风险地图的城市低空无人机飞行计划初始生成方法,并通过仿真案例说明该方法的有效性,为后续城市低空无人机飞行计划协同推演与优化调配奠定基础。
职称论文怎么写
2 城市低空无人机飞行计划多类型冲突协同推演
本节针对初始生成的城市低空无人机飞行计划,重点聚焦“飞行冲突”问题,提出了城市低空无人机飞行计划多类型冲突协同推演方法。本节构建了多无人机四维航路冲突探测模型,以冲突发生率、冲突风险等级和栅格占用比例等特征指标表征无人机航路网络的冲突情况,并通过仿真实验模拟100架无人机在固定时间窗内的执行初始飞行计划,通过冲突探测模型找出对应的冲突航路点,分析航路网络冲突特征。
2.1 无人机与无人机的冲突协同推演
2.1.1 无人机与无人机冲突协同推演模型
基于风险地图的四维航路是具有三维空间坐标和时间的有序数列集合。在栅格化空域下,四维航路考虑了无人机运行时的潜在风险,三维空间坐标包括(x,y,z),主要的时间信息有计划出发时间(Estimated time of departure, ETD)、计划到达时间(Estimated time of arrival, ETA)和当前时间(Current Time, CT)。ETD和ETA由初始飞行计划制定,作为战术阶段实际飞行计划的参考,ETD由计划出发时间决定,ETA由ETD和无人机飞行速度共同决定。例如在战术阶段,不改变飞行速度但更改战略阶段的ETD,ETA将随之改变;在不改变ETD的条件下调整飞行速度,TEA也将随之改变。
3 城市低空无人机飞行计划自适应优化调配
3.1 无人机飞行计划优化调配多元策略设计 根据2.1节的四维航路定义,从空间和时间两个维度分别来研究冲突解脱策略。从空间维度分析,唯一的解脱策略是调整冲突位置的飞行路径,不需要更改无人机的整个飞行计划。从时间维度分析有两种解脱策略,一是改变无人机的飞行速度,通过加速或减速来改变后续航路点的计划到达时间ETA;二是直接调整计划出发时间ETD,这将改变该条航路中每一个航路点的ETA以避免冲突。调整飞行路径、调整飞行速度和调整飞行时间策略如图11所示。
(1)调整飞行路径
在栅格化空域中调整飞行路径有两种方法,改变飞行高度iz或调整二维坐标(,)i ix y。调整二维坐标可以使无人机在平面中转向,不需要进行升降的垂直运动。如在同一高度运行的两架无人机在某个交叉航路点发生冲突,令其中一架无人机选择其他候选航路点是最迅速的解脱策略,调整二维坐标的原则是对无人机后续航路和整个航路网络的影响最小,且能完成飞行任务。如图11(a)所示,无人机1U和2U在交叉航路点1CWP发生冲突,将1U的原始路径1 1 2{w,CWP,w}修改为{w,w,w},2U路径不变,可以实现平面转向以避免冲突。若更改一个航路点的原始路径无法消除冲突,继续修正冲突航路点的路径,直至冲突消失,但这样会增加少量的距离成本。
另一种调整飞行路径的方法是改变飞行高度。在某些情况下,改变飞行高度能更加高效地解决冲突,尤其是在空域环境较为复杂的城市区域,如CBD(Central Business District,中央商务区)等,无人机飞行高度较低时由于周围障碍物过多难以进行平面转向,此时爬升或下降是更好的解脱策略。在改变飞行高度时需要考虑未经过的航路路段,当无人机目的地位于地面或目的地高度较低时,若冲突航路点位于航路末段选择下降作为解脱策略;若冲突航路点在航路前段或中段选择爬升作为解脱策略。如图11(a)所示,3U和4U发生对头冲突[4],有一个相向的共通航段,这种情况下调整飞行速度和调整飞行时间只能延迟冲突发生,不能消除冲突,由于4U即将到达目的地,此时让3U爬升是最好的解脱方案。
(2)调整飞行速度
调整飞行速度策略指通过加速或减速来消除飞行冲突,在时间维度上,加(减)速会使后续航路点的ETA提前(滞后),以此避免冲突发生。假设{},(,)n nijV =v i j∈为无人机nU的四维航线速度集合,在航路点i,j航段内速度为nijv。如图11(b)所示,5U和6U发生交叉冲突[4],速度分别为5ijv和6ijv,且5 6ij ijv =v,两无人机在同一高度接近某一交叉航路点,在这种情况下由于无人机6U将先占据该栅格(更加接近交叉航路点2CWP),选择策略为增加6ijv,减小5ijv,将2CWP处的25CWPt滞后,26CWPt提前,增加两无人机经过该航路点的时间差,使6U在5U进入该区域前通过交叉航路点并退出该区域,实现冲突解脱。
(3)调整飞行时间
如图11(c)所示,调整飞行时间策略是调整无人机的计划出发时间,记无人机nU的计划出发时间ETD为nETDt,所有无人机的ETD集合为{},nETD ETD uavT =t n ∈N。战略阶段生成的飞行计划没有考虑无人机之间的冲突问题,需要在预战术阶段进行调整,通过调整ETD可以改变每个航路点的ETA,从而解决部分冲突问题。
在多架无人机组成的四维航路网络中,需要组合以上策略来解决全局视角下的飞行冲突问题。三种策略各有其优点和局限性,空间解脱策略(调整飞行路径)可以即时地消除局部冲突,但会对整体航路网络产生后续影响,因为修改冲突位置的航路也许会与其他无人机的计划路线产生新的冲突;时间解脱策略(调整飞行速度和调整飞行时间)具有良好的全局性,但无法应对对头冲突等较为急迫的情况。因此需要选择合适的冲突解脱策略来应对不同的冲突场景,从而全局性地减少整个航路网络的冲突数量,为合理选择解脱策略,本文在下一节提出了优化调配框架来应对决策问题。
4 结论
(1)面向无人机“个体”,考虑无人机与城市静态环境目标之间的冲突问题,构建了弹道下降和失控滑行两种下降模式下的无人机对地风险评估模型,生成了精细化、组合化的城市低空概率风险地图,使用JPS算法构建了基于概率风险地图的低空无人机飞行计划初始生成方法,以可接受的少量额外路径作为代价,可有效降低执行长距离任务时的潜在对地风险。仿真实验表明,基于风险地图的城市低空无人机三维路径规划方法减少了50%的较高风险节点,相应的路径长度仅增加了3.74%和6.29%,整体路径节点的伤亡风险明显降低,有效保证了无人机运行安全。
(2)面向无人机“群体”,考虑无人机与无人机之间的动态冲突问题,构建了无人机飞行计划多类型冲突协同推演模型,设计并度量了冲突发生率、冲突风险等级和栅格占用比例等冲突特征指标。仿真实验表明,105个冲突点均为两两冲突,呈发散状分布,少量聚合于某段航路,多存在于空域中央;大部分无人机集中飞行在90米以下的空域,120米以上的最上层空域少有无人机涉足,所有冲突位置均在60米以下空域;第20s时空域的繁忙程度最高,有42架无人机同时运行,在300秒之后空域使用比例已低达万分之四,在第600秒后,大多数无人机已完成飞行任务,低空无人机运行数量维持在极低水平。
(3)设计了调整飞行路径、飞行速度、飞行时间等多元化调配策略,建立了基于多元策略自适应配置的无人机飞行计划优化调配模型,验证了所提方法的优化性能和参数敏感性,实现了不同交通密度场景下城市低空无人机飞行计划的有效优化调配。仿真实验表明,自适应策略在以冲突数量最少为前置条件时,能够将冲突减少到4个,且风险成本和时间成本仅增加了0.136%和63%;当无人机少于40架时,能得到完全无冲突的四维航路,当无人机少于100架时,冲突解脱百分比均在95%以上;对实验空域设置容量阈值为140架无人机,在阈值范围内,风险成本、时间成本和冲突数量与无人机数量呈正相关,且无人机群的平均冲突数量小于0.1,冲突解脱百分比为92.94%~100%,在不同交通密度下所提方法均可有效减少冲突数量和冲突解脱成本。
参考文献(略)