本文是一篇工程硕士论文,结合理论分析、步态轨迹生成与实验验证,本文提出的基于混合链的双足机器人模型为仿生机器人的设计提供了参考思路,基于全域能耗最优的构型优化方法及其结论也为双足机器人的构型提供了优化思路。
第一章:绪论
1.1 研究背景与意义
本课题来源:上海市自然科学基金项目“具有屈膝行为的双足机器人行走机制与稳定性控制”(项目编号:20ZR1440500)。
Bill Gates[1]曾说过,机器人将进行一场崛起革命,从而改变新时代的生活方式。随着计算机技术与人工智能产业的迅速发展,机器人已经成为21世纪高科技研究课题的代表,涵盖了机械工程、理论力学、电子信息、控制工程、自动化、仿生学、计算机科学、人工智能等多个学科,应用到了工业生产、交通物流、医疗康复、生活娱乐等多种场景错误!未找到引用源。。因此,机器人技术的研究在诸多行业都发挥着重要价值。
不同类型的机器人在社会分工中扮演了多种多样的角色。以运动方式划分,机器人可以分为固定式错误!未找到引用源。、轮式错误!未找到引用源。错误!未找到引用源。、履带式错误!未找到引用源。、足式错误!未找到引用源。、飞行式错误!未找到引用源。及各种组合式错误!未找到引用源。错误!未找到引用源。等。通过研发、应用特定场景下不同功能的机器人,大大降低了现代生产生活中的人力成本和时间成本,提高了社会运行效率。其中,足式又分为双足式错误!未找到引用源。、四足式错误!未找到引用源。和多足式错误!未找到引用源。等。相比之下,足式机器人在复杂地面适应能力和运动灵活性上面有更加出色的表现。同时由于高效、自然的运动形式,足式运动成为了众多科研机构与高等院校不断钻研的课题,其仿生运动机理受到了从事相关行业科研人员的特别关注。
由于双足机器人在上下楼梯、翻越障碍物错误!未找到引用源。错误!未找到引用源。等场景中不可替代的仿人特性,双足机器人成为了机器人技术研究领域中的重要方向之一。开展双足行走机器人的研究工作对于以下几个方面具有重要意义:(1)探索在军事、救援等恶劣不连续地面环境下的工作可能性错误!未找到引用源。错误!未找到引用源。;(2)验证控制理论与控制工程的最新成果,探究足式运动稳定性进化机理错误!未找到引用源。;(3)拓宽人机协同工作的应用领域;(4)推进康复医学、康复医疗辅助设备的研究进程错误!未找到引用源。错误!未找到引用源。;
............................
1.2双足机器人国内外发展现状
双足机器人可根据自由度与主动关节之间的数量关系分为全驱动(主动行走)与欠驱动(被动动态行走)模式。全驱动双足机器人是指机器人各个关节均有驱动装置,是目前双足机器人样机研发的主流架构。欠驱动(被动动态行走)双足机器人由于缺失下肢部分关节的驱动装置或实时力矩输入,以驱动输入+自身动力学特性相结合的方式完成周期性被动动态行走,具有步态自然、存在固有稳定性、行走速度快及行走能耗低的特点。通过长期进化,人类的行走具有高效、稳定、自然的特点,属于上述的欠驱动被动动态行走。本节将从以上两个方面分别介绍。
1.2.1全驱动双足机器人
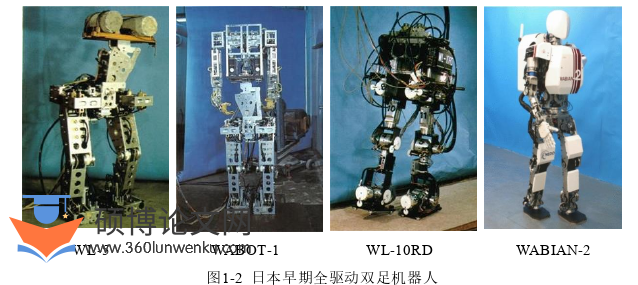
日本是最早进行双足机器人研究的国家,具有先进的机器人技术。其中具有代表性的有:
加藤一郎实验室于1967-1971年推出了双足行走机器人WL系列,WL-5错误!未找到引用源。共10个自由度,行走速度每步45s,可以调整行走方向;1973年,Kato推出世界第一台全身双足机器人WABOT-1错误!未找到引用源。,配置了机械臂和视觉的WABOT-1具有11个自由度,可以通过触觉传感器抓取物体;1985年,Takanishi提出的WL-10RD错误!未找到引用源。具有12个自由度,可以通过踝关节力矩反馈实现柔性控制;2005年,该实验室推出WABIAN-2错误!未找到引用源。,腿部共14个自由度,行走更加自然。
工程硕士论文怎么写
.........................
第二章:基于混合链的双足机器人运动学建模与分析
2.1机器人的运动学描述
在实际应用的过程中,需要将机器人在空间中的位置和状态(位姿)描述出来,以便后续运动学求解与步态规划。本节将对机器人运动过程中的基本概念进行介绍。
2.1.1 机器人的位姿
在双足机器人的描述过程中,首先需要定义好世界坐标系,并以此作为基坐标。它的原点一般是机器人初始状态下身体质心投射在地面上的投影,其中,Z轴方向竖直向上,X轴方向垂直屏幕,Y轴方向根据右手定则确定。
局部坐标系是指与所描述物体所固连的坐标系,相对于世界坐标系来说,它是一个“可动坐标系”。
.............................
.2.2 混合链机器人的模型建立
本文在双足机器人的设计过程中采用了以平面四连杆机构作为大腿、弹簧减震机构作为小腿的混合链式腿部结构。从仿生角度思考,在开链中加入闭链结构以增加机器人腿部的刚度,提升腿部重心以减少运动惯量。
2.2.1仿生学思考
双足机器人不仅要求在外形上与人类相似,而且行走步态方式也与人类相似,这就显得双足机器人的腿部结构设计尤为重要。近年来,学者们将仿生学应用于双足机器人进行了诸多研究,如Grzzle错误!未找到引用源。仿照人类骨骼和肌肉组织设计的MABLE,美国NASA错误!未找到引用源。错误!未找到引用源。基于人体测量与生物力学设计的Valkyrie。Zhao针对电机驱动的输出扭矩小以及液压驱动的能耗大问题,基于人类的行走机能提出双足机器人电液混合动力驱动系统错误!未找到引用源。;Che错误!未找到引用源。将双足机器人的腿部配置为一个有五个主动关节和六个被动关节的串并联混合机构,建立了仿生双足机器人的运动学模型模仿人类特征。
可以看出,基于仿生机制思路研究双足机器人的机构设计获得了较好进展,但多数机器人还存在腿部无法伸直、屈膝前进、运动缓慢等问题,其仿生学性能还有待改进。如何减少腿部惯量、增加腿部运动刚度以及保证腿部伸直的直膝站立与行走,实现可靠性强的高性能双足机器人本体机构仍是机器人机构设计所关注的重要问题。
通过借鉴人类腿部肌肉和骨骼模型,模仿人类大腿前肌群、后肌群和小腿肌群对腿部的驱动机理,提出基于混合链结构的双足机器人机构模型,设计平面四连杆闭链大腿机构实现大腿和小腿的俯仰摆动,同时将踝关节驱动进行上移。该混合链结构从机构构型上进行了奇异点规避设计,提高机器人运动刚度、降低腿部运动惯量,保证机器人在行走过程中的直膝站立与行走。
...............................
第三章:基于全域行走能效的机器人构型优化研究........................ 39
3.1三杆四质点动力学模型............................ 39
3.1.1机器人动力学描述.......................... 41
3.1.2动力学步态周期描述................................. 41
第四章:混合链双足机器人实验平台设计.............................. 59
4.1机器人总体结构方案设计.................................. 59
4.1.1 Motor版——M716 ............................... 60
4.1.2 Servo版——S716 .............................. 61
第五章:总结与展望............................... 73
5.1 论文的工作总结...................................... 73
5.2 下一步研究展望................................. 74
第四章:混合链双足机器人实验平台设计
4.1机器人总体结构方案设计
本文所设计的混合链机器人的机械与控制架构如图4-15所示:

工程硕士论文参考
如图4-15所示,本节将给出本研究所设计的混合链机器人腿部三维模型与控制方案。
结构方面,两款机器人的单腿均由三自由度髋关节、大腿、单自由度膝关节、小腿与双自由度踝关节组成,共6个自由度。然而在实际应用中,双足机器人结构所固有的奇异属性将会导致其无法直立行走,笨重的驱动器也会拖累机器人使关节运动变得缓慢。本文针对上述问题进行了如下研究:(i)采用改进四连杆机构、构建非零传动角的方式来规避直腿奇异点,同时在S716的膝关节装置了弹簧机构以辅助膝关节稳定越过站立奇异点;(ii)通过合理布置传动机构将膝关节驱动电机重心上移,不仅为机器人减少了前进过程中的运动惯量,也增加了机械本体的结构刚度,为机器人前进“减负”;(iii)对关键零部件进行静力学分析与优化,确保结构设计可靠。
.............................
第五章:总结与展望
5.1 论文的工作总结
双足机器人是近年来融合多学科多领域的热门研究方向,如何使机器人像人一样拥有灵活、高效且自然的行走步态是学者们不懈努力攻克的难题。本文围绕这一目标,从仿生学角度构建了双足机器人腿部结构模型,并基于全域行走能耗分析了机器人最优结构参数,最后设计出了机器人实物模型。主要做了以下工作:
(1)建立了混合链机器人模型并进行基于主从链法的正逆运动学求解。针对传统单链双足机器人运动惯性大、由于机构奇异位姿而无法直腿站立与行走等问题,从仿生与机械原理角度进行分析,提出了基于混合链的12自由度双足机器人腿部模型,通过基于主从链的矢量坐标法描述连杆位姿并求解正运动学,利用解析法与插值法相结合的方法获得机器人逆运动学解,最后在Matlab中进行正逆运动学轨迹仿真以验证运动学推导过程正确无误。
(2)建立基于全域行走能效的机器人构型优化模型。针对双足机器人构型没有统一设计参考的问题,基于三杆四质点简化动力学模型,采用全域能量效率作为评价指标,采用序列二次规划方法对机器人进行优化,得到了机器人各部分结构参数对于行走能耗的影响,并求得本文机器人最优构型与最优步态参数,为机器人实体结构的设计与加工提供指导。总体来看,在一定速度、步长范围内,腿部占全身质量的比重越低、髋部占全身质量的比重越高、 腿部质量越集中于髋部、身体质心与髋部质心距离越短,其行走平均效率越高。
参考文献(略)