本文是一篇计算机论文,本文结合注意力机制进行基于孪生神经网络的单目标跟踪,通过引入CBAM模块,使得网络能够聚焦在重要特征上,增强了算法在复杂场景下对跟踪目标的辨识能力。
第一章绪论
1.1研究背景及意义
目标跟踪算法的研究背景可以追溯到20世纪70年代。最早的跟踪算法主要基于运动模型、图像处理等传统方法,具有较低的精度和鲁棒性。伴随着深度学习等技术的不断发展,最近几年出现了一系列以深度学习为基础的跟踪算法,取得了更高的跟踪精度和鲁棒性。
当人们接受和处理信息时,视觉信息占据了很大一部分,尤其是在日常生活中,大约八成的信息都是通过视觉获取的。这种依赖于视觉的情况在计算机技术、互联网和人工智能的快速发展下变得更加普遍。计算机视觉技术就是人类视觉和感知的延伸,它可以通过分析大量复杂的图像信息来处理各种问题,从而减轻人眼的疲劳,提高处理效率。目标跟踪技术就是计算机视觉领域的一个重要分支,它是模式识别和图像处理等多学科的融合技术,其主要目的是利用图像或视频序列中的信息,实现对一个运动目标的实时跟踪。目标跟踪技术在人机交互、自动驾驶、安防监控、智能交通、军事制导等领域中的应用越来越重要。在人机交互的应用中,目标跟踪可以对兴趣目标的姿态和面部进行分析,实现对下一步行为的判断。在自动驾驶中,目标跟踪可以实时监测前方路况,以避免意外发生。在安防监控中,目标跟踪可以记录区域内移动目标的轨迹,满足不同应用需求。在军事制导领域,目标跟踪可以应用于武器制导、无人机侦察等方面。
目标跟踪技术已经成为计算机视觉技术中的重要组成部分,在众多应用领域中发挥着越来越重要的作用。但在实际应用中,目标跟踪任务面临着多种难点和挑战。其中包括:目标形变和尺度变化,遮挡,光照变化,背景干扰等,这些难点和挑战使得目标跟踪任务变得复杂和困难,需要跟踪算法能够克服这些困难,提高跟踪精度和鲁棒性,近年来,国内外许多学者对于此进行了不同的尝试,使得目标跟踪这一领域涌现出许多优秀的算法和思想,目标跟踪也得以迅速发展。
.........................
1.2国内外研究现状
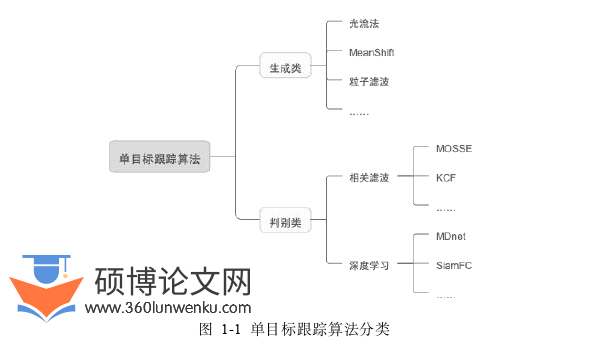
目标跟踪算法根据任务不同分为单目标跟踪(Single Object Tracking,SOT)以及多目标跟踪(Multi-Object Tracking,MOT)。
本文研究的主要内容是基于视频的单目标跟踪算法,也就是在一个视频画面中,只对一个固定对象进行追踪,而在背景中,如果有外表类似或类型相同的对象,则算法应保证不被其影响,并保留对其进行追踪的能力。单对象的追踪是指用一个短短的视频或者一系列的图像来获得有关对象以及背景的情境信息,然后,再以这个为基础,来对被追踪对象的外表状况和移动状况进行建模,进而以这个建模为基础,来对被追踪对象在接下来的帧中的位置状况进行预报,并识别出被追踪对象的所在的地点[1]。特别是,以视频为基础的单对象追踪算法,只对图像系列的第一帧所能带来的信息进行了充分的挖掘,比如,边缘框和背景信息等。此外,还可以构建出与追踪对象相关的特征模型,并通过此模型在视频的接下来帧中,对被追踪对象的位置进行预测。
在单目标跟踪算法研究中,更关注目标匹配问题,其研究成果对提高多目标跟踪算法的准确度也具有较好的借鉴意义。
在多目标跟踪任务中,算法需要在视频序列中同时追踪多个目标。多目标跟踪需要同时解决目标检测和跟踪问题,即在每一帧图像中检测出多个目标并进行目标的跟踪。多目标跟踪算法通常需要考虑目标之间的相互关系和运动模式,并将目标的轨迹和身份信息进行维护和更新。
单目标跟踪算法与多目标跟踪算法关键的区别是,与SOT相比,SOT无需再额外获得目标的表观信息,而MOT则要求利用物体探测等技术逐个识别出不同的物体,以防止由于物体相似而导致的物体漂移和标记错误。
计算机论文参考
.................................
第二章单目标跟踪相关理论基础
2.1卷积神经网络
2.1.1神经网络的发展
1998年,Yann Lecun等人在论文"Gradient-Based Learning Applied toDocument Recognition"中提出了使用全连接神经网络(Artificial Neural Network,ANN)[31]进行手写数字识别的方法,其中他们使用了一种名为LeNet的ANN模型,该模型在识别美国支票上的手写数字方面表现出色。这是第一个在大规模数据集上成功应用神经网络的研究之一,为深度学习的发展奠定了基础,标志着现代卷积神经网络的雏形基本形成。
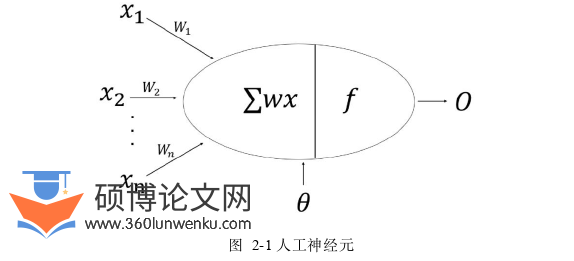
ANN的思想模仿了生物的神经元之间的连接方法,将人造神经元相互联系起来,并让人造神经元根据生物神经元的作用机制展开输入和输出,最后形成了一个复合的人造神经元如图2-1所示。
计算机论文怎么写
................................
2.2注意力机制
2.2.1注意力机制概述
注意是人脑特有的一种信息加工机理。人们对整个图像进行迅速的扫描,就能得到人们关注的范围,也就是注意力的集中点,再把注意力集中在该范围内,就能过滤掉那些不必要的信息,得到更多的物体细节。这是因为人类的能量有限,所以才能在不消耗能量的情况下,提取出最好的能量。
其实质上类似于人的选择注意,其目的是从海量的数据中找出最有价值的数据。将上述过程从数学上进行抽象,可以用以下的公式来表达:Attention =f(g(x),x)(2-4)
其中,g(x)表示对输入特征进行处理并产生注意力的过程,f(g(x,),x)表示结合注意力对输入特征进行处理的过程。
2014年GoogleMind团队的成果[35]让注意力机制名声大噪。他们在己有的RNN模型上加入注意力机制来完成对于图像的分类,
并取得了高性能的结果。随后,Bahdanau等人首次将注意力机制应用在NLP领域中[36]。他们提出在机器翻译任务上引入注意力机制使翻译和对齐能够同时进行。Xu等人[37]利用注意力机制完成了图像的标注工作,为深度学习的研究提供了新思路。从这以后,这个方法在基于RNN神经网络模型的各种深度学习任务中就被大量的使用。2017年,自注意力机制(self-attention)[38]又被提出并且被广泛使用,可以在机器翻译上来学习文本的表达。如何将注意力机理应用于CNN也是当前的一个热门课题。
..............................
第三章结合CBAM的孪生网络跟踪算法.........................20
3.1孪生神经网络...............................20
3.1.1 Siam FC跟踪算法....................................21
3.1.2 SiamR PN......................................22
第四章动态更新的孪生网络单目标跟踪方法..........................29
4.1KCF算法模块...............................29
4.1.1基于相关滤波的跟踪算法概述................................29
4.1.2 KCF算法........................30
第五章总结与展望.................................42
第四章动态更新的孪生网络单目标跟踪方法
4.1KCF算法模块
4.1.1基于相关滤波的跟踪算法概述
以相关滤波为基础的目标追踪算法是一种常见的目标追踪方式,它的基本思路是通过使用相关滤波器来对目标进行追踪。
相关滤波器是一种线性滤波器,它的基本原理是将目标模板与图像进行相关计算,以得到目标与图像在空间上的相似度。具体地,相关滤波器利用目标模板在图像中的位置来计算一个响应图像,然后在响应图像中找到最大值所对应的位置,即为目标的位置。
在基于相关滤波的目标跟踪算法中,首先需要对目标进行初始化,即选取一个包含目标的矩形框,并提取该矩形框中的图像块作为目标模板。然后,在后续的帧中,利用相关滤波器来对目标进行跟踪。具体地,对于每一帧,算法会选取一个候选区域,并提取该区域中的图像块作为候选模板,然后将候选模板与目标模板进行相关计算,得到一个响应图像,并在响应图像中找到最大值所对应的位置,即为目标的位置。最后,利用该位置来更新目标模板,并继续对下一帧进行跟踪。
基于相关滤波的目标跟踪算法具有简单易实现的特点,但是其准确性和鲁棒性较差,在复杂场景下容易出现漂移等问题。因此,近年来,研究人员提出了许多改进算法,如KCF算法、DSST算法、CSR-DCF算法和ECO算法等,这些算法在保持基于相关滤波的目标跟踪算法的简单性的同时,提高了算法的准确性和鲁棒性。
...............................
第五章总结与展望
近年来,目标跟踪任务成为计算机视觉中的热点,越来越多的学者投入到这一领域的研究,得幸于此,优秀的目标跟踪算法层出不穷。尤其是Siam系列的算法目标跟踪任务中发展壮大。本文的主要工作总结如下:
1.结合注意力机制进行基于孪生神经网络的单目标跟踪,通过引入CBAM模块,使得网络能够聚焦在重要特征上,增强了算法在复杂场景下对跟踪目标的辨识能力。
2.针对大部分基于孪生神经网络的目标跟踪算法不更新模版,而导致目标发生形变时容易预测失败,本文提出了一种动态模版更新的孪生神经网络跟踪算法。当跟踪器判定目标遮挡时切换使用关键点进行KCF算法预测,使未被遮挡的特征点的位置移动替代整体目标框的移动;当目标恢复时,更新跟踪模版,以适应目标的变化,从而提升算法的鲁棒性。
3.在公开数据集上对比了几种相关的单目标跟踪算法,实验证明本文提出的动态更新模版的mySiamRPN鲁棒性更强,性能更优,且在速度上也远超实时性的要求。
参考文献(略)