本文是一篇计算机论文,本文将时空序列作为输入,根据输入数据的维度特征进行模型设计。与传统的将每一帧距离多普勒特征投影成一维,逐帧拼接生成特征图的方式不同,本文不对时序距离多普勒信息进行压缩。
第一章 绪论
1.1研究背景及意义
生物识别技术因其安全性较高、验证流程便捷等特性得到了市场青睐。基于生物特征的识别方法优势在于可以基本确定访问者身份的唯一性,而大部分基于密码的验证方法事实上不能确定拥有访问服务权限者为其本人。
生物识别技术根据一个人的一些主要生理和行为特征对其进行识别[1]。常见的生理特征包括指纹、虹膜、面部特征等;行为特征包括步态以及打字风格等。指纹、面容等生理特征具有独特性及稳定性,基于此类生理特征的识别方式在手机等智能设备解锁、应用程序登录等方面得到了广泛应用,然而这些不可更改的生理特征被广泛收集,给个人信息安全带来了巨大隐患。3D打印技术的出现使得伪造人脸面部信息变得更加容易,甚至可以伪造能通过识别系统的人脸面具[2];指纹特征一方面易于伪造,另一方面“万能指纹”[3]的出现极大地威胁了指纹识别系统的安全。
步态作为一种复杂的动态时空生物行为特征[4],因具有可远距离获取、难以伪装和非接触式检测的特性正得到广泛的关注,在公安刑侦以及智慧家居等诸多领域得到了应用[5-6]。基于指纹等生物特征的识别方式往往需要被识别者配合接触传感器,而基于步态的识别方式可以实现非接触式的识别,避免了人与传感器的接触,这在新冠肺炎疫情常态化防控中显得尤为重要。在刑侦及安防领域,由于步态难以伪装,步态识别可以提供重点区域布控方案。
当前,基于毫米波、WiFi等微波的无线射频识别技术在人类活动识别 (Human Activity Recognition, HAR) 领域得到了广泛应用。无线射频信号除了被用于传输数据,还可以用来感知外部环境。信号发射器产生的无线电波经直射、反射、散射等多条路径进行传播,在信号接收器处形成多径叠加信号。多径叠加信号受到物理空间的影响,携带的信息能够反映出环境特征,可由此判断出待感知对象的相关信息。射频识别技术无需被测目标使用传感器,故可以大幅降低网络成本和能耗。
.........................
1.2国内外研究现状
本文的研究目标是利用毫米波雷达,进行步态识别。因此本文从步态识别、毫米波雷达的应用这两方面对国内外研究现状展开调研。
1.2.1 步态识别研究现状
步态指的是运动过程中肢体的运动模式。医学诊断和心理分析研究[8-9]指出,个人步态特征具有唯一性,因此可以作为生物特征用于目标识别。
(1)步态识别技术
从识别方式上来看,步态识别可分为接触式识别和非接触式识别两种。接触式识别通过加速度传感器、角速度传感器等可穿戴设备实现步态识别,如研究[10]利用微机电系统 (Micro Electro Mechanical Systems, MEMS) 惯性传感器获取并分析步态信息,计算步态参数,然而这种感知方式需要受试者时刻佩戴这些传感器来完成识别,无形中增加了成本,另外一方面降低了受试者参与的积极性。因此,如今研究更倾向使用非接触式无线感知方法。
常见的非接触式无线感知方法主要有基于摄像头的计算机视觉方法以及射频识别技术。在计算机视觉领域,研究人员开展了大量步态识别方面的研究,基于步态的识别系统在智能视觉监控中有重要意义。但是,基于视觉的方法会采集到用户的敏感信息,例如用户的体貌和面部,这可能会侵犯用户的隐私,引发人们对于隐私安全的担忧,尤其是在公共区域中部署的时候。
有研究聚焦使用红外传感器进行步态识别[11-13],市面上也有大量集成了红外传感器的产品。最著名的是Microsoft发行的一系列运动感应输入设备Kinect,这些设备集成了RGB 摄像头、红外投影仪等传感器,通过结构光或飞行时间 (Time of Flight, ToF) 计算映射深度,进而实现实时动作识别以及身体骨骼关节点检测等功能。Staranowicz等[14]结合了确定性学习理论和Kinect数据流,进行步态识别。Bari等[15]使用Kinect的红外传感器获取的骨架信息实现步态识别。
.............................
第二章 相关背景知识介绍
2.1FMCW毫米波雷达
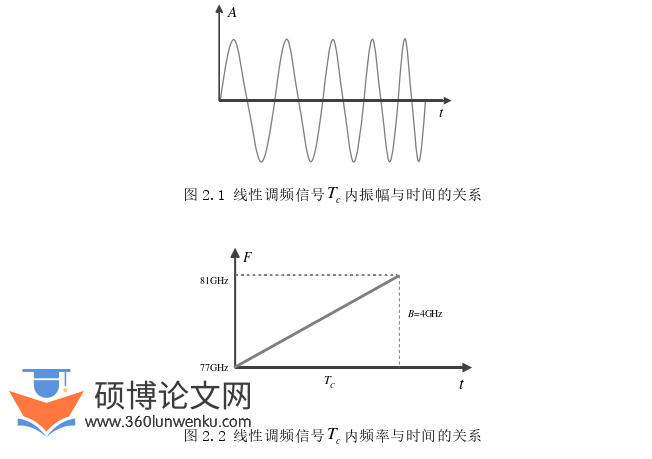
调频连续波雷达 (Frequency Modulated Continuous Wave,FMCW) 是一种特殊的雷达传感器,优势在于能够同时测量移动目标的距离以及速度。与简单的连续波雷达 (Continuous Wave, CW) 一样,工作时辐射连续发射功率。与CW雷达相比,FMCW雷达可以在测量工作期间改变其工作频率,即传输信号在频率上进行调制。使用频率调制雷达发送一个信号,该信号的频率周期性地增加或减少。当接收到回波信号时,频率的变化会像脉冲雷达技术一样获得延迟t。在脉冲雷达中,必须直接对时间进行测量,在FMCW雷达中,只需要计算实际发射信号和接收信号之间的频率或相位的差异,这种计量方式往往更加准确。
FMCW雷达的雷达发射的信号频率随着时间周期线性变化,在周期cT内,雷达发射信号的频率以S的速率在带宽B上线性变化,单个周期内的信号被叫做一个Chirp。一个周期cT内,发射信号的振幅与时间的关系如图2.1所示,频率与时间的关系如图2.2所示。
计算机论文怎么写
..........................
2.2时空序列分析
本文研究的问题是利用毫米波雷达获得的目标行走数据来预测目标的身份。每一条的行走数据含有T帧,对应T个观测。从机器学习的角度来说,这是一个时空序列预测问题。
一种常用的办法是逐帧拼接一维特征生成特征图,将时空序列问题转换为空间问题,如MU-ID[39]将获得的每一帧毫米波数据对应的距离多普勒图进行去噪,推导出每个距离处的主导速度,然后将各帧进行拼接,生成能表示时空维度的热图。然而,同一距离处有时会存在多个人体部位目标,提取单一主导速度的做法显然会忽略掉一些身体部位产生的速度,并且该方法不能反映回波信号的强度。丁晨旭等[41]将每一帧对应的距离多普勒图向速度维投影,逐帧拼接构建微多普勒特征图。经过对采集的距离多普勒图的观察,观察到即使在一帧的观测时长下,单个目标身体不同位置的响应可能出现在雷达可分辨的一段距离范围之内,而非某一距离处,投影变成一维数据的做法有可能破坏帧内数据的空间自相关性。
一种解决方法是将每一帧信号序列作为输入,将其视作一个时空序列分析问题,例如Yu等[42]利用距离角度图序列作为输入,实现动作识别。时空序列有时间、空间两个维度,下文将对常见的处理空间数据及时序数据的深度学习模型进行介绍。
.........................
第三章 基于毫米波时空序列的步态识别框架........................ 20
3.1信号处理 .............................................. 21
3.1.1 2D-FFT .......................................... 21
3.1.2 静物干扰去除及动态反射滤除.............................. 22
第四章 基于毫米波时空序列的步态识别模型....................................... 28
4.1基于AttResNet-LSTM的步态识别模型 ................................... 28
4.1.1 AttResNet-LSTM网络结构 ................................................. 28
4.1.2 融合注意力单元的残差网络设计................................................. 29
第五章 实验及结果分析 ...................................... 40
5.1实验环境 ...................................... 40
5.2数据集构建 ....................................... 41
第五章 实验及结果分析
5.1实验环境
本文使用的TI的FMCW毫米波雷达AWR1642BOOST,该毫米波雷达支持两发四收,具有77 GHz至81 GHz达4 GHz的可用带宽。将DCA1000 EVM数据采集板与毫米波雷达组合,实时采集传输数据,如图5.1,毫米波雷达架设在三脚架上,与地面垂直,雷达与地面的距离为75 cm。
计算机论文参考
通过与DCA1000 EVM 连接,可以实现将收集到的信号送入计算机中。TI开发的专用软件 mmWave Studio用于通过配置雷达设备、运行采集和存储数据来控制整个系统。所描述的连接方案如图5.2所示。毫米波雷达具体配置参数如表5.1所示。通过mmWave Studio对于步态数据进行采集得到二进制文件,供后续处理分析。实验在远程服务器上运行,配备NVIDIA GeForce GTX TITAN X 12 GB GPU,系统为Ubuntu18.04.5 LTS,CUDA版本为Cuda11.1,实验使用的Pytorch版本为1.9.0。
..............................
第六章 总结与展望
6.1工作总结
步态作为一种时空生物特征,在刑侦、安防等领域受到了广泛关注。与指纹、面容等生理特征相比,步态具有难以伪装、非侵入式检测的特点。传统的步态方法往往基于计算机视觉的方法,需要使用摄像头记录用户的行为特征,会引起用户对于面容等隐私信息泄露的担忧。射频识别技术的发展很大程度上保护了用户的隐私。本文使用毫米波雷达,进行步态识别,与其他的射频识别技术如WiFi相比,毫米波指向性强,抗干扰能力强,感测成像分辨率更高。本文的主要工作如下:
(1)利用毫米波雷达采集步态数据,对于每条原始数据,抽取包含多帧的时间序列,对每帧数据经过2D-FFT、背景噪声滤除操作,构建了包含11,600个样本的用户时空数据集,其中11,000条为5s观测时长下的样本,600条为2.5s观测时长下的样本。每个样本包含十帧数据,每帧数据对应一个距离多普勒矩阵,为时空序列。
(2)本文将时空序列作为输入,根据输入数据的维度特征进行模型设计。与传统的将每一帧距离多普勒特征投影成一维,逐帧拼接生成特征图的方式不同,本文不对时序距离多普勒信息进行压缩。本文设计的AttResNet-LSTM模型,在残差网络中引入注意力单元,首先分别对于输入的样本的每一帧进行特征提取,生成一维中间编码,再以时序将每一帧对应的中间编码输入长短期记忆网络得到分类结果。本文设计的ConvRNN-ResNet模型,利用卷积循环神经网络和残差网络循序连接的方式,先利用卷积神经网络生成中间时空特征编码,在输入到残差网络中进行训练,本文对与残差网络进行改造,经实验证明,使用本文构建的网络结构模型,在5s时长的测试集上准确率高达99.2%。此外本文通过设置对比实验以及消融实验对不同结构的选择对模型的性能影响进行评估。
参考文献(略)