第一章 绪论
1.1 研究背景与意义
近年来,随着 VR 一体机和 cardboard 设备的兴起,沉浸式虚拟体验逐渐走入人们的日常生活,在教育、数据可视化、房地产、旅游、医疗等领域有着广泛的应用。然而,沉浸式虚拟漫游系统中的平面映射技术一直处于不成熟阶段,研究者力求找到一个友好交互性的解决方案,平面映射技术伴随着虚拟系统中移动需求方式的发展而产生。
早期人们采用最多的移动方式是通过鼠标、键盘或手柄之类的不太自然的输入设备控制人在虚拟世界中的移动,而用户在实际空间中保持静止,这种方式显然会导致巨大的视觉与运动感知上的不一致性,没有良好的用户体验。后来,人们提出各种移动技术,如让用户下半身做原地踏步动作以代替行走[1-5],这种方案似乎接近自然行走但上身姿态不太协调,随后又出现了用手臂的摆动标识行走动作,可以让用户减少不协调感[6-8]。之后,人们借用跑步机或魔毯等运动辅助设备以达到原地行走的效果,由最初的线性跑步机[9-12]只能够使用户进行直线行走到现在的全方位跑步机让用户可以自由地向任何方向行走[13-16],或采用一个真人大小的仓鼠球[17]实现全方位行走,但这类技术无法解决用户在转弯时的失去平衡现象[18, 19]。
上述技术会在一定程度上产生步行的感觉,但与自然行走相比会削弱人对场景的沉浸感,所以真实的步行技术比原地行走或其他固定方式更能带来自然的用户体验[20]。Gai[21]等人在真实行走方面做出了尝试,允许用户在一个精心设计的虚拟空间中行走,虚拟空间的大小和形状与真实空间相同,但是如果用户在虚拟空间中行走 10m 相对应现实世界中同样行走 10m,随着虚拟空间的增大我们无法提供同等大小的实际可操作空间,这也是目前沉浸式虚拟漫游自然行走中所面临的空间难题,这个问题的顺利解决不仅能够提升用户沉浸感与交互感而且能够实现用户使用家中固定大小的空间(如 4m×4m)遨游世界的体验,具有巨大的商业价值。为了解决自然行走中的空间局限性,
Razzaque[22]提出重定向步行(RDW)技术方案。RDW 通过交互式的、不可接受的旋转虚拟场景使用户旋转自己。RDW会让用户在不知情的情况下在真实空间中绕圈,同时认为自己在虚拟空间中走的是一条直线或无限长的路径。
.................................
1.2 国内外研究现状
虚拟漫游系统中的平面映射技术将会对现有的虚拟漫游体验方式产生变革式影响。近年来 VR 动感座椅是虚拟漫游体验的主要应用形式,其中用户是处于静态的,因为实际应用中商家无法提供与虚拟区域同等大小的真实空间以供用户行走。平面映射技术旨在提供一种行走状态下的空间不对等的 VR 体验方案。本文主要从平面映射技术的三种技术方案进行总结。
1.2.1 渲染操纵
为了匹配给定的虚拟空间和物理空间,研究者提出一种平面映射方法为沉浸式虚拟现实导航提供最小失真效果和避免折叠影响。该类方法由二维平面网格物体的形变发展而来,并且研究者成功的将网格形变方法拓展到三维空间。
第二章 相关知识.................................
1.2 国内外研究现状
虚拟漫游系统中的平面映射技术将会对现有的虚拟漫游体验方式产生变革式影响。近年来 VR 动感座椅是虚拟漫游体验的主要应用形式,其中用户是处于静态的,因为实际应用中商家无法提供与虚拟区域同等大小的真实空间以供用户行走。平面映射技术旨在提供一种行走状态下的空间不对等的 VR 体验方案。本文主要从平面映射技术的三种技术方案进行总结。
1.2.1 渲染操纵
为了匹配给定的虚拟空间和物理空间,研究者提出一种平面映射方法为沉浸式虚拟现实导航提供最小失真效果和避免折叠影响。该类方法由二维平面网格物体的形变发展而来,并且研究者成功的将网格形变方法拓展到三维空间。
Schüller[28]等人将格林应变参数化并应用在有界网格的变形,试图将已有网格映射到一个圆形区域上。该方法进行网格合理的收敛,避免得到一个高度扭曲的效果与局部网格的倒置,为虚拟空间和真实空间之间的有界映射提供了可能性。但是此种方法只关注如何将现有网格映射到固定形状的空间区域,并没有考虑映射之后局部空间形变的平滑性和角度形变的合理性。为了提供一个没有折叠的并且具有低等距和保角失真的形变,Poranne[29]提出了平滑基函数以约束网格形变。该方法限制了由常用的 b 样条函数、高斯光滑基函数引起的线性变形空间,在所选形变约束点上使用特定的凸约束并且提供了约束点的密度和类型以避免自身折叠与角度失真,同时保证全局感兴趣区域的失真约束。
上述方法的无自身折叠与角度保真性质可以避免虚拟空间映射到真实空间出现的路径重叠与拐角失真现象,能够为空间路径提供合理的变形方案。但是这种方法在明显大于实际空间的虚拟空间映射中将会产生不可接受的视觉构件,严重影响了虚拟空间的体验效果。Sun[30]提供了该问题的合理解决方案并可适应于三维空间,该方法首先计算虚拟和真实平面图之间的映射以保证虚拟世界和真实世界之间的等距性和保角性,从而达到视觉和移动体验的一致性,根据平面图和场景内容渲染最终场景,以平衡视觉真实性、几何一致性和感知舒适度。但是该方法在大的开放虚拟空间映射到一个小的真实空间时,用户能够轻易注意到过多的场景扭曲,降低了用户对移动和视觉的保真度。
...............................
...............................
2.1 虚拟漫游
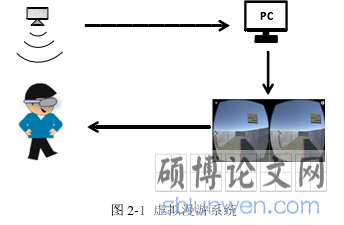
虚拟漫游为问题的解决建立了一个交互式环境,也可以定义为一个计算机生成的三维环境,用户可以通过步行与环境进行交互和探索[49]。虚拟漫游系统如图 2-1 所示,其中 Kinect 用来跟踪用户的运动,通过服务器(PC)将 Kinect 收集的用户运动与虚拟空间的视角摄像机进行关联,从而实现用户运动和虚拟运动的对应。
平面映射方法的提出是为了解决在有限的跟踪区域中探索大型虚拟环境的虚拟漫游空间问题。它旨在将物理空间与虚拟运动相结合,并通过重定向算法改变虚拟空间中的运动。
...............................
2.2 传统重定向算法
重定向算法主要为了充分利用真实空间,使得在固定大小的真实空间中行走尽可能长的距离而不碰撞墙壁。传统重定向算法主要有三类方法: S2C(Steer-to-Center)、S2O(Steer-to-Orbit)、S2M(Steer-to-Multiple-Targets)。这三类方法的主要区别在于选择转向的目标不同。
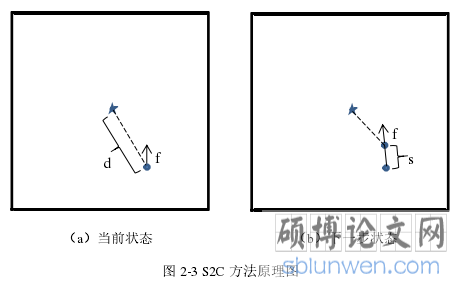
2.2.1 S2C
由于用户离真实空间的边界越近,其后续操作与该边界发生冲突的风险越大。因此,该方法将用户往跟踪区域的中心进行引导,以便为后续操作提供更大的灵活空间。在跟踪区域中,用户的行进方向朝向跟踪中心的偏转是渐变的,偏转的大小和方向是根据用户到中心点的距离和用户的当前方向与从其位置到中心点的矢量之间的角度的组合确定的。
...........................
第三章 基于 One-Step-Ahead 策略的重定向算法 ............................ 19
3.1 问题描述 ............................................ 19
3.2 解决方案 ................................... 20
3.3 生成导航路径 ........................................ 22
第四章 虚拟漫游系统实现 ........................................ 36
4.1 系统框架介绍 .................................... 36
4.2 关键点和虚拟边界定义 ............................. 37
4.3 位移偏量实现 .................................... 39
第五章 实验分析 ......................................... 50
5.1 仿真对比实验 ...................................... 50
5.2 真实用户实验 ....................................... 57
5.3 本章小结 ................................ 59
第五章 实验分析
5.1 仿真对比实验
5.1.1 实验设置
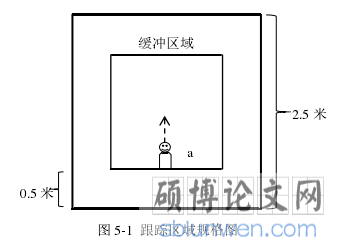
首先,在虚拟空间中,我们设计两种虚拟场景用于仿真,分别为可模拟具有结构化空间属性的迷宫和可模拟没有尽头的直线公路。它们的规格分别为 S 迷宫(10米×10米)、M 迷宫( 25 米× 25 米)、L 迷宫(100米×100米)和1km直行路径、5km 直行路径。其次,本文设置了 2.5 m× 2.5 m(A 空间)和 4.0 m×4.0 m(B 空间)的两种跟踪空间,在漫游开始时,用户可以在跟踪区域的任何位置进行定位,我们在此假设用户在开始漫游时处于北墙的中间。
...................................
第六章 总结与展望
6.1 工作总结
本文提出了一种新的重定向算法引导用户在小规模跟踪区域内进行大规模虚拟空间的导航。传统的重定向算法会出现撞墙次数过多和重置方法体验感差等问题。本文注重上述问题的解决,采用三级行走曲率弧线进行引导,使用缓冲区域和 one-step-ahead 方法来减少碰撞和改进重置方法。 本文的主要工作如下:
(1)选择导航的起点和终点后,算法自动生成 Voronoi 路径不仅为用户在虚拟空间的导航提供指引还为路径的映射提供相邻路径的关系指导。
(2)设计带缓冲区域的跟踪空间,利用三类曲率弧线进行行走指导充分利用了跟踪区域,有效的减少了碰撞次数。
(3)提出一种动态的重置转向方法,不必冻结场景后进行重置操作,提升了用户的虚拟漫游体验。
(4)实现虚拟漫游系统,并在获取 Kinect 数据时实现了用户偏移量的计算,有效的捕获了用户的移动距离。
6.1 工作总结
本文提出了一种新的重定向算法引导用户在小规模跟踪区域内进行大规模虚拟空间的导航。传统的重定向算法会出现撞墙次数过多和重置方法体验感差等问题。本文注重上述问题的解决,采用三级行走曲率弧线进行引导,使用缓冲区域和 one-step-ahead 方法来减少碰撞和改进重置方法。 本文的主要工作如下:
(1)选择导航的起点和终点后,算法自动生成 Voronoi 路径不仅为用户在虚拟空间的导航提供指引还为路径的映射提供相邻路径的关系指导。
(2)设计带缓冲区域的跟踪空间,利用三类曲率弧线进行行走指导充分利用了跟踪区域,有效的减少了碰撞次数。
(3)提出一种动态的重置转向方法,不必冻结场景后进行重置操作,提升了用户的虚拟漫游体验。
(4)实现虚拟漫游系统,并在获取 Kinect 数据时实现了用户偏移量的计算,有效的捕获了用户的移动距离。
(5)我们在仿真实验和系统运行中验证了方法的有效性,并证明本文方法对于大规模虚拟地图和长路径的可行性。
参考文献(略)
参考文献(略)