本文是一篇电气自动化论文,本文利用数据增强、图像融合等方式构建了包含不同背景、不同尺寸、不同材料的数据集,使数据集具有广泛的代表性。并采用k-means++算法获得了更为合适的先验框,有效去除了抖动产生的冗余先验框,提高了准确率。
第一章 绪论
1.1 课题研究背景及意义
近年来,我国社会经济持续快速发展,各个行业、各个领域对电的使用量逐渐加大,因此,稳定庞大的电力运行环境是我国实现工业化、现代化发展的基础[1-3]。改革开放以来,我们国家的电力系统不断更新,输电线路的发展效率全世界都少见,电力相关设施规模更是居世界首位[4]。高压电力线路作为发电厂和工厂、生活区间电力传输的纽带,是电力系统中不可或缺的一部分。由于长期暴露在自然环境中的高压输电线路既要经受冰霜雨雪等恶劣天气的影响,又要承受导线的垂直、水平荷重和导线张力等挑战,极易发生破损、老化、自爆等问题,给输电线路安全运行造成重大隐患。因此,对于维护高压输电线路中电气设备工作安全性及稳定性的研究具有十分重要的意义。
高压电力线路中元器件较多,多分布于野外,环境恶劣,传统电力巡检依靠人工作业、手动记录的方式,这不仅耗费人力还会出现信息传输不及时、效率低、成本高、安全事故频繁等问题。目前无人机(Unmanned Aerial Vehicle,UAV)技术发展迅速,广泛应用于军事作战、物资运输、工业、农业等各个领域,是实现空中作业机械化全覆盖的重要途径。在高压线路巡检作业中,采用无人机智能巡检能解决人工作业的弊端。无人机作业节省了大量的人力,并且作业人员的安全性也能够得到一定的保障,由于作业在低空领域的无人机不受复杂地形地貌影响,因此相对于人工巡检的方式,无人机巡检的优势越来越明显,逐渐突出了无人机强大的工程应用价值。与此同时,机器代替人眼对目标进行检测、跟踪、测量的计算机视觉占比也日渐突出,在人脸识别、视频监控、图片识别分析、辅助驾驶等方面得到了广泛应用。
..........................
1.2 国内外发展趋势分析及研究现状
1.2.1 电力线路缺陷无人机识别发展趋势和研究现状
在电力巡检领域,无人机已成为电力巡检的主要工具。现阶段国内外的无人机电力线路巡检主要是将可见光、红外等成像设备搭载在无人机上,人工采用工具和算法对拍摄传回的图像进行识别、筛选,无人机通过获取电力元件与输电线路位置信息来实现对高压电力线路的自主巡线。为进一步提高无人机电力巡检的智能化水平,众多国内外学者在算法领域开展了研究并取得了一定的成果,主要包括输电线路绝缘子、防震锤等组件缺陷的精准检测与组件缺陷检测算法的轻量化部署。
电力线路元件的缺陷识别大体经历了三个阶段:从最初的传统图像处理到采用机器学习处理再到采用深度学习方法处理。实现元件缺陷检测的最初阶段的传统图像处理方法主要是根据检测物的纹理、外形等特征,通过人工的方式对其进行特征设计,但是该方法需要复杂的调参过程,只针对具体应用,对的处理能力弱,泛化能力和鲁棒性差。为实现多目标的检测与识别,研究学者将有监督的机器学习与设计特征算子相结合,获得了不错的识别效果。但是机器学习在处理规模较大、覆盖面积较大的输电线路时,不能满足实际场景下复杂背景中的处理效果。
近年来,具有极好自我学习能力的深度卷积神经网络凭借其强大的迁移学习与特征学习突破,在图像识别分类、目标检测、实例分割等方面应用广泛。越来越多的电力线路采用基于深度卷积神经网络对元件组件的缺陷进行检测,在高难度检测中表现出的性能要远超出传统图像处理方法,深度学习方法可以应用于具有更好的泛化能力与鲁棒性。如张烨等[6]采用Fine Mask RCNN算法实现了输电铁塔涉鸟故障的识别,准确度均值为93.8%;袁田等[7]针对玻璃绝缘子自爆、裂缝问题采用了激光检测方法,认为场测量方式解决玻璃裂缝测量最好;虢韬等[8]采用两阶段Faster-R-CNN[9]算法对电力线路进行巡检,对无人机图像中的绝缘子缺陷进行识别并判断,总体检测精度达到72%;唐小煜等[10]基于U-Net分割模型提出一种改进的SERes-Unet网络,通过提取绝缘子掩模实现缺陷检测;刘子英等[11]对绝缘子污秽等级进行判断;马鹏等[12]采用迁移学习方法对电力设备部件做定位与识别,绝缘子等5类电力设备检测的平均精准度达到91.1%;崔永杰等[13]建立了以混合样本为基础的迁移学习方法并提出均衡损失函数,解决样本不平衡问题,绝缘子缺陷检测精度达到75.1%;
..........................
第二章 无人机电力线路巡检原理介绍
2.1 引言
21世纪以来,随着各领域智能化的快速发展,无人机用于输电线路巡检的优势逐渐凸显。在巡检过程中,越来越多基于卷积神经网络的检测框架被提了出来,如基于深度学习的二阶段目标检测识别框架、单阶段检测框—YOLO、SSD,YOLOv2,YOLOv3等,弥补了传统目标检测中鲁棒性差、工作量大等缺点。另外,在完成巡检任务的过程中,无人机若能自主规划出优秀的避障航迹路线,可以大幅度提高巡检任务的效率,降低安全事故的发生,同时可以有效的节省财力物力。因此,必须综合考虑任务区域环境以及避障航迹规划算法的适应性。为保证无人机巡线的安全性和绝缘子缺陷检测的准确性,本章对目标检测算法及飞行避障算法的原理基础进行了介绍。
...........................
2.2 绝缘子检测相关算法理论基础
采用无人机航拍进行电力巡检提高了作业效率,但大量的绝缘子缺陷图像数据也给工作带来了巨大挑战。绝缘子图像的缺陷部位较小,单纯依靠人工肉眼挑选出破损元件,不仅耗时耗力,还难以保障检测的准确性。目前,对于输电线路中绝缘子的检测任务,主要是采用传统经典及深度学习的目标检测方式,后续学者又提出轻量级网络模型进行检测任务。
2.2.1 传统经典目标检测理论
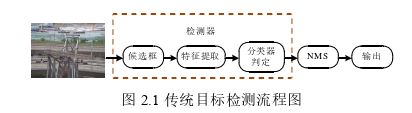
传统的目标检测算法通常先根据不同语义对图像进行分割,再进行检测。如HOG[33]、LBP[34]等传统目标检测一般情况下分为三个步骤进行检测识别,分别是:选择候选区域、对图像特征进行提取、采用分类器对目标进行回归分类,并通过非极大抑制算法(Non-maximum suppression,NMS)去除冗余目标框,传统目标检测流程图如图2.1所示。
电气自动化论文怎么写
选择候选区域:传统目标检测算法采用预先设定好尺寸的滑动窗口对图像进行区域选择,由于目标物体可能会随机出现在图像的任意位置,因此需要搜索出目标可能存在的全部区域。然而该方法无针对性,通过牺牲时间为代价来换取精度,在实际执行过程中会产生大量冗余框,且存在同一目标被多次识别的现象,耗时耗力,性能降低。
................................
第三章 基于改进轻量级网络的检测模型 ....................... 15
3.1 引言 ............................................. 15
3.2 YOLOv5s 网络模型结构 .............................. 15
3.3 Ghost Net 瓶颈模块 ................................ 16
第四章 基于改进 YOLOv5s 算法的绝缘子缺陷检测 ....................... 29
4.1 引言 ........................................ 29
4.2 基于均值聚类的 Anchor box 调整 ............................ 29
第五章 三维立体自主避障规划研究 ............................. 48
5.1 引言 .......................................... 48
5.2 环境约束及地形建模 .............................. 48
第六章 绝缘子故障检测系统的设计与实现
6.2 功能需求分析
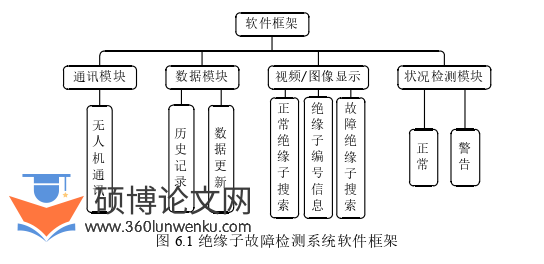
本文的目的在于开发一套以Linux为基础的绝缘子故障检测系统,其核心内容有:信息传输、绝缘子故障检测、检测结果可视化、检测结果显示等。本论文所开发的软件应当具备下列各项性能:
(1)信息传输:由无人驾驶飞机或线监控摄像机采集到的航空摄影图像传送至故障检测软件,工作人员可利用通信功能切换图像来源、调整拍摄角度等。
(2)绝缘子故障检测:此性能是整个检测系统的关键环节,它通过采用本文所提出的改进的方法,对所采集到的绝缘子进行检查,并根据所述方法,将所采集到的绝缘子的故障部位与故障的信息进行判断,以确定所测绝缘子是否符合要求。
(3)系统界面的设计:必须进行系统界面的优化,以便于对绝缘子及电路进行故障诊断。整个监控平台应该具备实时的图像、视频检测接口和状态监控接口。
在进行系统的设计时,既要考虑到系统所需要的功能要求,又要保证测试的快速、可靠,以适应现实的工作需要。
电气自动化论文参考
........................
第七章 总结与展望
7.1 研究总结
本文研究了输电线路中绝缘子识别与破损检测的深度学习方法,现有算法在同时兼顾模型大小与精确度方面有待提升,本文设计了以YOLOv5s为基础的改进算法,在将模型大幅缩减的同时提升了其检测精度,为无人机巡线的实时目标检测提供了改进思路。本文所做主要工作如下:
(1)对于目标检测算法和轻量级网络模型进行了梳理,详细介绍了基于深度学习的目标检测算法中单阶段算法的YOLOv5s,其较高的检测精度与极快的检测速度使它成为目标检测实际运用领域的最佳选择之一。
(2)利用数据增强、图像融合等方式构建了包含不同背景、不同尺寸、不同材料的数据集,使数据集具有广泛的代表性。并采用k-means++算法获得了更为合适的先验框,有效去除了抖动产生的冗余先验框,提高了准确率。
(3)为了满足航拍电力线路检测对速度和精度的要求,将YOLOv5s的网络结构进行改进。首先设计轻量化模块,对模型进行轻量化处理,降低了模型复杂度;其次,采用Bottleneck CSP作为YOLOv5s的骨干网络,使模型学习到更多特性;同时引入空间通道注意力机制,并提出一种改进的双向加权特征结构融合于网络中,使网络有效提升小尺度特征。实验表明,改进算法在在Insulator2022数据集上的mAP达到92.3%,与原算法相比,mAP提升了3.6%,参数量减少了26.73%,浮点运算量减少了23.17%,漏检率降低了5.47%。
(4)为了进一步突出本文基于YOLOv5s改进方法的优越性,采用Faster-RCNN、SSD、YOLOv3、YOLOv3-tiny和YOLOv7五种主流模型及文献8、文10、12、13以及19五种绝缘子相关检测算法与本文改进算法进行对比实验,并选用公开数据集进行测试。实验结果表明,本文改进算法优于已有模型,采用改进的YOLOv5s模型能在兼顾精度与模型大小的同时对绝缘子自爆故障进行检测,满足巡检需要。
参考文献(略)