本文是一篇电气自动化论文,本文在单台并网逆变器基础上,加入系统结构不确定性,将鲁棒H∞控制方法推广到多台并网逆变器,解决了多台逆变器投入和切出时的电能质量问题。
第1章 绪 论
1.1 研究背景及意义
随着社会生产力和经济的飞速发展,能源结构也发生了改变,以石油和煤炭为代表的化石能源逐渐走下历史舞台。以太阳能、风能为代表的可再生能源,发展越来越快。中国作为全球第二大经济体,面临各种国际和国内的各种不确定因素,其中环境和能源成为制约经济发展的两大主要矛盾。随着人口数量的日益增长,能源的供给和需求开始走向不平衡。在工业生产与社会生活中,能源短缺、一次能源所占比重大、环境污染问题严重,这些因素成为制约未来电网发展的一大显著问题,而可再生能源发电并网正是解决这一问题的关键。
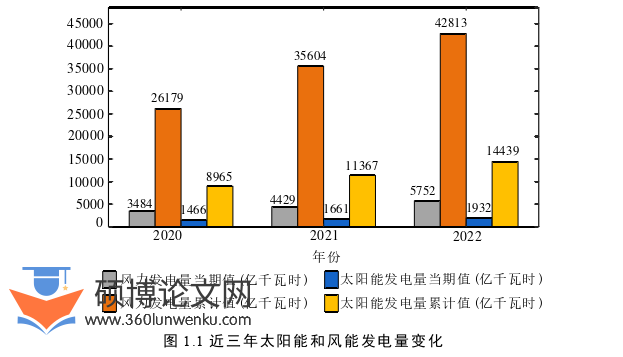
自21世纪以来,可再生能源的发展规模不断扩大,因此可再生能源的发电量也逐年上升。中国的可再生能源主要分成了六种,依次是风能、太阳能、生物质能、核能、地热能、潮汐能[1]。其中太阳能和风能是可再生能源发电的两种主要途径,在全国大部分太阳能和风能资源较充分的地区,都建设了风力发电站和光伏发电站。近三年,太阳能和风能发电量变化如图1.1所示。
电气自动化论文怎么写
.....................
1.2 并网逆变器谐振抑制国内外研究现状
在电力系统中,分布式电源有时作为备用电源,对系统运行的可靠性起支撑作用。为了提高整个电网安全性,常需要把分布发电并入电网。所以并网逆变器就成为连接分布式电源与电网的重要纽带。
并网逆变器触发脉冲的控制方式分为电压控制型和电流控制型,电压控制型控制并网输出电流,而电流控制型控制并网输出电压,两种控制方式互补。一般来说,并网处电流变化较大,所以通常采用电压控制型。根据并网逆变器中晶体管连接方式,可分为半桥、全桥和三相桥式逆变器。根据逆变器控制触发电平,可以分为两电平、三电平、多电平控制等[4]。另外在三相交流和单相交流两种电路中,也经常用到逆变器系统。通过控制并网逆变器的触发脉冲,可以控制并网逆变器的输出电压、电流,同时控制并网输出电能质量。
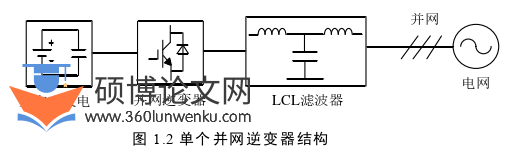
并网逆变器的拓扑结构之间的区别主要是并网逆变器中滤波器的结构,根据滤波器电容和电感数量及位置关系,一般的滤波器结构有L型、LC型、LCL型、LCLL型等。其中,应用比较广泛的是L型滤波器和LCL型滤波器;L型滤波器拓扑结构较为简单,但是滤波效果一般。LCL型滤波器滤波效果好,可以抑制高次谐波,但控制较为复杂,LCL型并网逆变器结构如图1.2所示。
电气自动化论文参考
...........................
第2章 LCL型并网逆变器建模及参数设计
2.1 LCL型并网逆变器拓扑结构
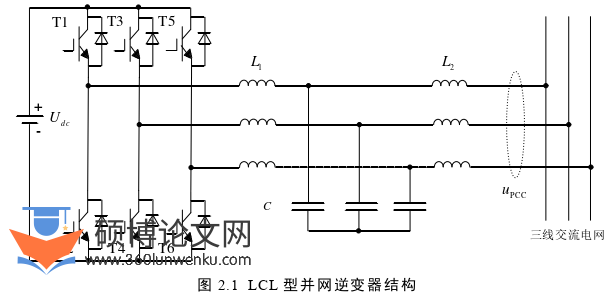
在LCL型并网逆变器结构中,主要包括分布式电源、逆变器、LCL型滤波电路、三相交流电网,逆变器采用三相全桥结构,如图2.1所示。
电气自动化论文怎么写
在图2.1中,PCCu为并网逆变器和电网的公共耦合点,分布式电源dcu是逆变器的输入,这里用直流电源来代替。其中L1、C、L2代表了LCL型滤波器的电感和电容元件;L1为直流侧电感,L2电网侧电感。T1~T6是6个晶体管对应的触发脉冲,晶体管上并联了续流二极管。续流二极管可以保护晶体管不被冲击电压和过电流击穿或烧坏。
................................
2.2 LCL型并网逆变器数学模型
在建立并网逆变器数学模型的过程中,常忽略LCL型滤波器的寄生电阻、逆变器开关管的损耗;假设三组阻抗近似相等,三相电路中的元器件对称且参数相等;这有利于对并网逆变器进行线性化分析。
状态空间表达式由状态变量、状态方程、输出方程构成,是系统传递函数另外一种完整的表达形式。由于在状态空间方程计算和求解的过程中,可以通过计算机快速完成,广泛应用于控制系统的分析。因此将传递函数的表达形式转换为状态空间方程,方便后续鲁棒控制器的设计与分析,也利于建立多台并网逆变器的状态空间方程表达式。
常见的坐标系有三相静止坐标系(abc)、两相静止坐标系(αβ)、两相旋转坐标系(dq)。两相静止坐标系比三相静止坐标系的耦合系数小,各个变量的变化关系对彼此没有影响。坐标系变换的实际意义在于方便计算,减弱变量之间的耦合关系,减少变量彼此之间的干扰。所以在并网逆变器中,常用三相静止坐标系建模,两相静止坐标系、两相旋转坐标系下设计控制系统。
在LCL型滤波器参数设计过程中,首要考虑LCL滤波器输出电能质量问题。参数设计的原则是LCL型滤波器谐振频率必须远大于并网逆变器的工作频率,并且LCL型滤波器等效阻抗不小于2~3倍的电网阻抗。考虑到后续多台逆变器同时运行,投切顺序不一,应考虑LCL型滤波器参数设计留有裕量[42]。
................................
第3章 LCL型并网逆变器谐振及稳定性分析 ........................... 15
3.1 LCL型并网逆变器阻抗小信号模型 ............................... 15
3.2 LCL型并网逆变器谐振影响因素 .......................... 18
第4章 单台LCL型并网逆变器谐振抑制方法研究 ........................... 24
4.1 单台并网逆变器鲁棒H∞控制 .......................... 24
4.1.1 虚拟同步机控制环节 .................................. 24
4.1.2 虚拟阻抗环节 .............................. 26
第5章 多台LCL型并网逆变器谐振抑制方法研究 ........................... 41
5.1 多台并网逆变器鲁棒H∞控制 ................................ 41
5.2 并网逆变器结构不确定性范围 ................................ 42
第5章 多台LCL型并网逆变器谐振抑制方法研究
5.1 多台并网逆变器鲁棒H∞控制
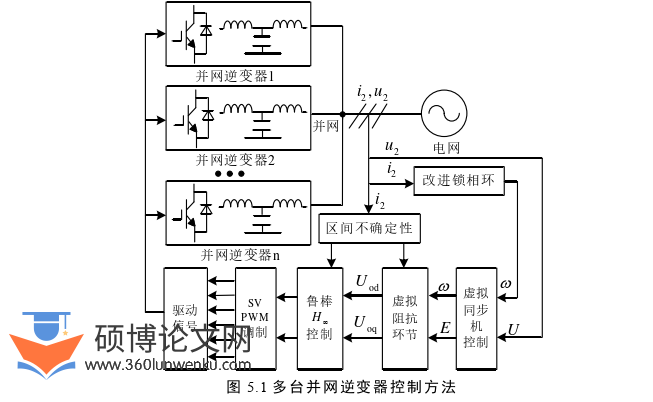
在单台并网逆变器控制系统基础上,通过扩大系统结构不确定性的范围,可以解决多台并网逆变器运行过程中投入和切出时带来的电能质量问题。此处采用阻抗区间不确定性和高斯分布函数来描述系统的结构不确定性,具体多台并网逆变器控制方法如图5.1所示。
电气自动化论文参考
如图5.1所示,多台并网逆变器之间是采用并联的结构,且多台并网逆变器的控制系统是基于单台逆变器控制结构的基础上改进而来的。首先在原有虚拟阻抗环节和鲁棒H∞控制环节基础上加入了区间不确定性,增加了对并网逆变器输出阻抗的不确定性描述,扩大系统的不确定性范围。最后改进了锁相环系统,使得并网逆变器和电网的具有同步输出相位。
...........................
结论与展望
结论
本文以并网逆变器为研究对象,针对并网逆变器运行过程中存在电网阻抗波动和多台并网逆变器投切问题,研究了鲁棒H∞控制方法,通过理论基础和仿真验证,得到以下结论:
(1)在单台并网逆变器运行时,并网逆变器的产生谐振主要来源于电网阻抗的波动。并网逆变器控制系统无法做出一个自动调节的过程,使并网电流和电压波形出现畸变,从而导致系统出现谐振问题。
(2)通过在并网逆变器上设计和仿真鲁棒H∞控制方法,并且和下垂控制、比例积分控制作对比,验证了本文所提鲁棒H∞控制方法解决电网阻抗波动和谐振抑制问题的可行性和有效性。
(3)分别在单台并网逆变器和多台并网逆变器两种情况下,对电网阻抗波动情况下采用不同控制方法进行对比,得出如下结论:采用传统的比例积分控制方法,可以实现在电网阻抗小范围波动情况下的系统稳定。对于多台并网逆变器,这种方法抗干扰效果不明显。采用下垂控制方法可以实现在多台逆变器投切时维持系统的稳定,减小多台逆变器投切时带来的冲击电流。
(4)本文采用鲁棒H∞控制和虚拟同步机控制相结合的控制方法,可以抑制并网逆变器谐振,提高并网输出电能质量。在多台并网逆变器运行时,可以减少逆变器投切而产生冲击电流的幅值。这两种控制方法兼顾了并网逆变器运行的不同工况,实现了并网逆变器高质量的电能输出。
参考文献(略)