本文是一篇电气自动化论文,本文分析了12/8极单绕组BSRMWR的具体工作原理,基于麦克斯韦应力法推导了电机的转矩和悬浮力数学模型,并通过数学处理消除了悬浮力数学模型中的耦合问题;利用ANSYS软件对电机进行仿真分析建立了电机的转矩和悬浮力特性曲线表,为后续制定电机的控制方法奠定了理论基础。
第一章 绪论
1.1 无轴承电机
1.1.1 无轴承电机研究背景
传统电机采用机械轴承来防止定子和转子之间的碰撞,但电机在运行过程中转轴和轴承之间始终存在摩擦,这会影响电机的运行效率并增大损耗。滑动轴承、调心球轴承以及滚动轴承等虽可以在一定程度上减轻摩擦损耗,但轴承与转轴之间仍然存在物理接触,因此电机转轴的损耗无法避免。随着现代工业技术的不断发展,高速和超高速电机日益成为研究热点,如何解决电机转速升高后转子与轴承之间的机械摩擦问题,增加电机的运行可靠性,成为了电机研究的一大方向。
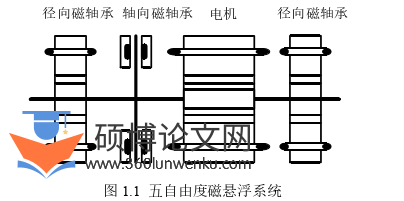
为提高电机的运行效率并延长使用寿命,研究人员提出了气浮和液浮两种轴承技术,首次实现了电机转子和轴承之间的无接触运行,但这两种技术仍然存在占用空间大、可靠性低和维护成本高等缺点,不具备推广意义。二十世纪下半叶,磁悬浮轴承技术逐渐成熟起来,该技术是通过控制系统内部磁场的不平衡以产生磁拉力来保证电机转子的悬浮,因此具有无摩擦损耗、维护方便、适应高转速和使用寿命长等优势,从根本上克服了传统轴承的缺陷。如图1.1所示为一种典型的磁悬浮系统,该系统可以实现五自由度悬浮,系统由一个电机、两个径向磁轴承和一个轴向磁轴承构成,电机主要用于提供输出转矩,径向磁轴承和轴向磁轴承分别提供该方向上的磁拉力以实现转子的稳定悬浮。由于增加了三个磁轴承来实现电机的悬浮,因此该系统能耗较大、需要占据相当大的轴向空间;而且同时控制电机和多个磁轴承会使控制策略过于复杂,系统的硬件成本也过高。
电气自动化论文怎么写
..........................
1.2 无轴承开关磁阻电机研究现状
1.2.1 开关磁阻电机
随着微处理器技术、功率电子技术的不断进步,开关磁阻电机(switched reluctance motor, SRM)逐渐进入了人们的视野。SRM的定子和转子都是双凸极结构,由于控制电机的功率变换器仅缠绕在定子上,电机的转子由硅钢片叠压而成,因此SRM具有制造简单、成本低、容错性强、耐高温、易于控制等优点,特别适合工作在高速和恶劣的环境下,因此逐渐成为市场未来发展的主流。SRM目前已成功在航天飞机、电动汽车和纺织器械等多种领域得到了广泛应用,美国已将高速SRM驱动系统作为未来航天飞行电源系统的首选方案[40]-[45]。
1.2.2 无轴承开关磁阻电机
无轴承电机技术最早的应用主要集中在永磁同步电机上,直到上世纪八十年代,无轴承开关磁阻电机(bearingless switched reluctance motor, BSRM)的概念才被日本学者Higuchi所提出,BSRM同时具备了开关磁阻电机和无轴承电机的优点。在Higuchi学者的基础上,来自东京理工大学的M.Takemoto和A.Chiba学者研究了12/8极双绕组结构的BSRM,建立了该结构下电机的数学模型,并通过实验成功验证了12/8极双绕组BSRM的可行性。双绕组BSRM的定子上绕有主绕组和悬浮绕组两套绕组:其中主绕组主要用于控制电机的电磁转矩,同时为电机的悬浮提供条件;悬浮绕组的作用则是调节原磁场的不平衡度以构成不对称励磁从而为电机的转子提供悬浮力。此后,美国国家航空航天局、德国开姆尼茨工业大学和韩国庆星大学等科研机构同样针对BSRM开展了一系列的研究。国内在该领域的起步稍晚,但也成功实现了BSRM的稳定悬浮,现在BSRM的研究热点主要集中在电机本体结构的设计、转矩和悬浮力数学模型的推导、减振降噪控制方法、转矩脉动抑制以及容错控制等方向[20]-[39]。
........................
第二章 12/8极单绕组宽转子齿无轴承开关磁阻电机基本理论
2.1 12/8极单绕组BSRMWR工作原理
2.1.1 电机结构
以A相绕组为例,如图2.1所示分别为普通12/8极单绕组BSRM和12/8极单绕组BSRMWR的电机结构示意图。两种电机的定、转子都是双凸极结构,定子齿极弧为15°机械角,普通BSRM的转子齿极弧为15°机械角,BSRMWR的转子齿极弧为30°机械角。电机的每个定子齿上都绕有一套绕组,各个绕组独立控制,互不干扰,空间上相隔90°的四个绕组构成电机的一相,一个电周期对应的机械角度为90°,磁通呈NSNS分布。电机的转子仅由硅钢片叠压而成,转子上既无绕组也无永磁体。
2.1.2 电机工作原理
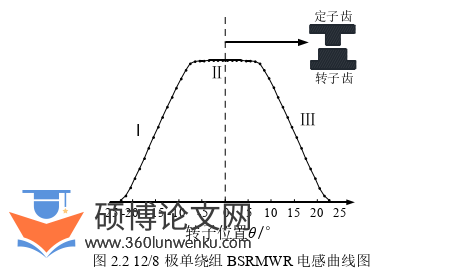
对12/8极单绕组BSRMWR进行有限元仿真可得到电机绕组电感随转子位置角的变化图如图2.2所示,其中将转子位置的0°角定义在定子和转子齿极轴线的对齐位置。电机在工作过程中,以45°为一个周期,根据定、转子的实时位置关系及电感曲线变化可以将一个周期分为三个阶段。在第Ⅰ阶段,定、转子齿极的重叠面积从0逐渐增大,对应图2.2中电感曲线的上升区;在第Ⅱ阶段,转子齿极弧为30°机械角要远大于定子齿极,因此在该阶段,定、转子齿极的重叠面积不变,对应图2.2中电感曲线的平顶区;到了第Ⅲ阶段,定、转子齿极的重叠面积逐渐减小,对应图2.2中的电感下降区。
电气自动化论文怎么写
.........................
2.2 12/8极单绕组BSRMWR转矩和悬浮力数学模型
12/8极单绕组BSRMWR在需要两相同时工作才能确保电机稳定运行,因此需要建立一种适用于该电机的双相导通数学模型。
2.2.1 转矩数学模型
现以A相四个绕组同时导通构成对称励磁为例,推导电机的转矩数学模型。由电机的工作模式可知,当转子位置处于[-22.5°,-7.5°]范围内时,若给A1、A2、A3和A4这四个定子绕组通入大小相等的电流便会构成对称励磁使A相产生正转矩,该电流被称为转矩电流iT。如图2.4所示为A相定子齿极处的磁通分布图,图中的磁通共分为两部分:主磁通和边缘磁通,主磁通由定子齿极经气隙垂直流入转子齿极,相应的磁通密度记为Bm。为方便计算,将边缘磁通的路径视为圆形,则边缘磁通共分为两个部分:流入转子齿极的磁通Bfi和流出转子齿极的磁通Bfo。
本小节以A相四个定子齿极导通提供悬浮力为前提,推导电机的悬浮力数学模型。当电机的转子位置处于[-7.5°,7.5°]时,控制A相四个绕组的电流大小不相等即可构成不对称励磁产生相应的悬浮力。设A相四个绕组电流分别为is1、is2、is3和is4,此时A相的等效磁路图如图2.5所示,图中的PA表示A相定子齿极处的气隙磁导,PBC表示其它两相定子齿极处的合成气隙磁导,Φ代表每个气隙对应的磁通量。
...............................
第三章 基于不对称半桥的无轴承开关磁阻电机DITC&DFC控制方法研究 .............................. 18
3.1 传统电流斩波控制方法 ................................ 18
3.1.1 开关状态定义 .......................................... 18
3.1.2 电流斩波控制方法 ................................. 19
第四章 适用于无轴承开关磁阻电机的新型功率变换器设计研究 ............................ 31
4.1 传统四电平功率变换器 ......................................... 31
4.1.1 BSRM功率变换器 ................................................. 31
4.1.2 传统四电平功率变换器及工作原理 ............................... 31
第五章 12/8极宽转子齿无轴承开关磁阻电机实验研究 ....................................... 43
5.1 硬件实验平台介绍 .............................................. 43
5.1.1 实验样机介绍 ............................................. 44
5.1.2 数字控制电路 ...................................... 45
第五章 12/8极宽转子齿无轴承开关磁阻电机实验研究
5.1 硬件实验平台介绍
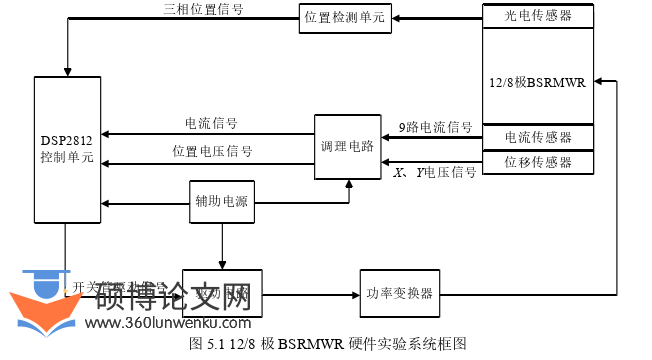
12/8极BSRMWR的硬件实验平台系统框图如图5.1所示,其主控芯片为TMS320F2812,外加外围辅助电路,其它还包括电流传感器、位移传感器、光电传感器、功率变换器及相应的驱动电路、辅助电源、调理电路和实验样机等,其实物图如图5.2所示。
电气自动化论文参考
.............................
第六章 总结与展望
6.1 主要工作
本文以12/8极BSRMWR为研究对象,针对电机在采用传统电流斩波控制方法下转矩和悬浮力波动较大的问题,主要从控制方法和功率变换器两个方面进行了研究,全文主要工作如下:
(1)分析了12/8极单绕组BSRMWR的具体工作原理,基于麦克斯韦应力法推导了电机的转矩和悬浮力数学模型,并通过数学处理消除了悬浮力数学模型中的耦合问题;利用ANSYS软件对电机进行仿真分析建立了电机的转矩和悬浮力特性曲线表,为后续制定电机的控制方法奠定了理论基础。
(2)介绍了传统电流斩波控制方法的基本原理,并分析了采用电流斩波控制方法下电机转矩和悬浮力波动较大的原因。针对电机转矩和悬浮力脉动较大的问题,研究了一种适用于12/8极单绕组BSRMWR的直接瞬时转矩和直接悬浮力控制方法(DITC&DFC),分析了该控制方法的工作原理并给出了控制框图,通过仿真验证了DITC&DFC控制方法的有效性。
(3)针对电机在采用不对称半桥功率变换器时绕组电流励磁和退磁速度较慢的问题,研究了一种适用于单绕组BSRM的新型功率变换器,该功率变换器具备升压模块,同时各绕组之间可以独立控制。分析了新型功率变换器的拓扑结构和工作原理,并根据新型功率变换器的工作特点制定了改进的DITC&DFC控制方法,通过Matlab/Simulink搭建了新型功率变换器的仿真模型,分别采用电流斩波控制方法和DITC&DFC控制方法进行了仿真分析,验证了新型功率变换器可以在保证电机稳定悬浮的同时实现电机的低转矩脉动运行。
(4)对12/8极BSRMWR实验平台的硬件和软件部分进行了简单介绍,基于上述实验平台,采用电流斩波控制方法对电机进行了空载悬浮实验,并在使用新型功率变换器的情况下成功实现了电机的稳定悬浮,初步验证了新型功率变换器的可行性。
参考文献(略)