本文是一篇电气自动化论文,论文利用USB摄像头采集开关柜操作图像,制作了训练数据集,对HOG+SVM、Faster R-CNN、YOLOv3和YOLOv4,4个算法展开模型训练,通过对模型检测速度和检测精度的对比,选择将YOLO算法部署到Jetson Nano嵌入式设备上。
第一章绪论
1.1课题的研究背景与意义
中置式开关柜是一种重要的电力设备,可以应用于电站、工业系统、地铁、医院以及基础民用设施等场所的配电网中,通过开关柜内的真空断路器实现电路接通和断开的功能。当电力设备或线路发生故障时,又可以快速的将故障部分从配电网络中切除,从而保证配电网中没有故障的部分正常的运行。
中置式开关柜整体结构上是由低压仪表室、断路器手车室、母线室和电缆室4个隔室组成。与其他类型的开关柜相比,中置式开关柜有着结构紧凑、占地面积小、维修方便、恢复供电时间短、操作安全性高等诸多优势[1-3]。因此,中置式开关柜在配电领域得到广泛的应用,随着电力行业的快速发展,中置式开关柜装机量不断增长[4]。
在中置式开关柜的运行过程中,安全操作至关重要,其每一步操作都要按照规定的步骤进行,一旦发生误操作事故。如在工作状态下打开柜门,带电合闸接地刀闸,将会引发人身伤亡事故,导致设备故障,引发大面停电等。近年来,发生在开关柜上的恶性事故时有发生,如河北某供电公司“3.23”人身事故、云南某供电局“10.17”人身触电身亡事故、某油田“4.19”触电亡人事故、某电厂“5.1”电气误操作人身伤亡事故[5]。所以,提高开关柜的操作安全性,避免误操作事故的发生,具有十分重要的意义。
在工程应用上,工程人员一直在不断的研究和改进中置式开关柜的防误操作方法。因此,根据实际需求,论文研究和开发中置式开关柜手动误操作警报系统,提出基于深度学习目标检测算法的手动操作意图检测方法,通过手动操作意图检测方法实现对操作人员打开断路器室门、打开电缆室门、移动断路器手车、操作接地刀闸,4个操作意图的检测,对16种违反开关柜安全操作规范的误操作进行判断,在误操作事故发生前发出语音警报,并语音提示正确操作流程,进一步保障中置式开关柜的安全运行。
........................
1.2研究现状
1.2.1开关柜研究现状
中置式开关柜也叫交流金属封闭开关设备,是按一定的电路方案将有关电气设备组装在一个封闭的金属外壳内的成套配电装置,开关柜的使用减少了电力设备的占地面积,使运行更加安全,有着很大的经济效益。
开关柜的早期结构在19世纪末就已经出现,随着上百年的技术进步,开关柜的的品种不断增加,在绝缘性能、小型化、智能化、经济性上取得了长足的进步。目前在开关柜的智能化、小型化、加工工艺方面等技术方面,国外相对处于领先地位,比较出色的外国公司有瑞士ABB公司、法国施耐德、德国西门子等,引领着开关柜不断往前发展。
我国在上世纪60年末,才开始进行自主设计开关柜,其发展过程大致包括仿苏-仿欧美-自主研发三个阶段。在几十年的努力发展中,我国所研发的开关柜性能不断提高,开关柜的种类也逐渐增多。目前我国的开关柜的智能化还不是很成熟,但随着我国对电力系统的要求不断提高和智能电网的大力发展,国产开关柜的智能化水平将会不断提高。
在计算机信息技术、通信技术等技术的支持下,开关柜的智能化是主要的发展趋势之一。通过在开关柜上安装控制、保护智能单元,可以实现测量、计量、控制、保护、通信、在线状态监测和故障诊断,有着强大防误操作功能,能够对误操作及时的进行提示,保证开关柜安全、智能、高效、稳定的运行[6]。
.........................
第二章系统总体设计方案
2.1系统功能需求分析
在第一章的警报系统研究现状里,已经分析本文系统的设计方法。在控制部分选择使用微控制器;在警报输出部分,选择语音警报;而在检测部分,考虑开关柜的结构紧凑和复杂,选择图像检测技术进行操作人员手动操作意图的检测,不需要考虑开关柜的局部结构,容易实现,安装方便。
从原理上看,开关柜手动误操作警报系统就是在操作人员操作开关柜时,进行检测,判断,防止误操作事故发生。因此,手动误操作警报系统应该具有人体感应功能、手动操作意图检测、误操作判断和语音警报等功能。
(1)人体感应功能:通过人体感应功能判断操作人员是否处于开关柜前,使手动操作意图检测单元只有在操作人员处于开关柜前的期间才进行手动操作意图检测。
(2)手动操作意图检测功能:手动操作意图检测单元通过摄像头采集现场图像,进行手动操作意图检测。
(3)语音警报功能:当检测到误操作时,通过语音芯片发出语音警报,提示正确的操作流程。
(4)误操作判断功能:通过开关柜的运行状态判断操作人员的操作意图是否是误操作。根据中置手车式开关柜正确操作的规定,手动操作意图包含了移动断路器、操作接地刀闸、打开断路器室门、打开电缆室门。
............................
2.2系统总体设计
系统结构如图2-1所示,整个系统由手动操作意图检测单元和警报判断输出单元组成,硬件部分均放置在开关柜上。手动操作意图检测单元通过USB摄像头采集图像数据后,利用Jetson Nano嵌入式设备运行深度学习目标检算法,进行手动操作意图检测,通过TTL转CAN模块完成与警报判断输出单元的CAN通信。警报判断输出单元以STM32f103c8t6微控制器为核心,实现与手动操作意图检测单元的CAN通信、误操作判断和语音警报输出。

电气自动化论文怎么写
开关柜手动误操作警报系统具体的实现过程如下:
首先警报判断输出单元通过人体红外感应模块判断开关柜前面是否有操作人员,当开关柜前面有操作人员时,通过CAN(Controller Area Network)通信向手动操作意图检测单元发送开启手动操作意图检测信号。
手动操作意图检测单元启动操作意图检测后,使用USB摄像头采集现场图像数据,通过手动操作意图检测方法检测操作人员的手动操作意图。当操作人员的手动操作意图属于移动断路器、操作接地刀闸、打开断器室门、打开电缆室门的时候,手动操作意图检测单元通过CAN通信将对应手动操作意图信号发送给警报判断输出单元,警报判断输出单元检测开关柜的运行状态,然后判断操作人员的操作意图是否属于误操作。如果是误操作,则通过语音模块发出语音警报,提示正确的操作步骤。
当操作人员离开开关柜后,警报判断输出单元通过CAN通信向手动操作意图检测单元发送停止检测信号,手动操作意图检测单元停止手动操作意图检测。
...............................
第三章开关柜手动操作意图检测算法的选择......................16
3.1手动操作意图检测算法...............................16
3.1.1 HOG+SVM算法.........................................16
3.1.2 Faster R-CNN算法.....................................18
第四章开关柜手动操作意图检测算法的部署.................................35
4.1手动操作意图检测算法硬件平台系统搭建..............................35
4.2 YOLO模型剪枝............................................37
4.3 YOLO模型剪枝实验....................................40
第五章系统软硬件设计与测试...............................51
5.1开关柜手动误操作警报系统硬件设计.........................51
5.2开关柜手动误操作警报系统软件设计.................................59
第五章系统软硬件设计与测试
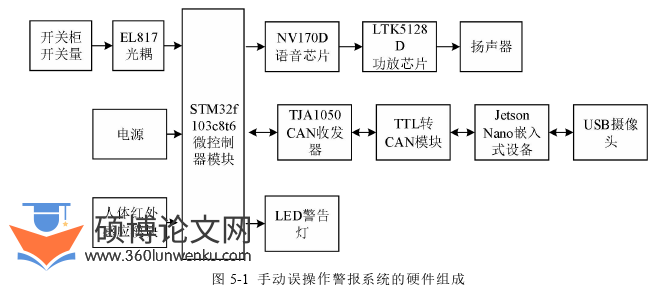
5.1开关柜手动误操作警报系统硬件设计
误操作警报系统整体上的硬件组成如图5-1所示。警报判断输出单元包含了STM32f103c8t6微控制器模块、NV170D语音警报输出模块、开关柜开关量采集模块、CAN通信模块、人体红外感应模块、警告灯模块和电源模块等。手动操作意图检测单元由USB摄像头、Jetson Nano嵌入式设备和TTL转CAN模块组成。
电气自动化论文参考
.........................
第六章总结与展望
6.1总结
中置式开关柜是重要的电力设备,在其运行过程中,安全操作是至关重要的一环,一旦发生误操作事件,将会造成严重的后果。因此,论文设计实现了开关柜手动误操作警报系统,系统主要由手动操作意图检测单元和警报判断输出单元两部分组成。在手动操作意图检测单元上通过YOLOv3目标检测算法实现了对操作人员的操作意图检测,通过警报判断输出单元进行误操作判断,在误操作发生前,发出语音警报,提示正确操作,进一步保障开关柜的安全运行。论文主要完成了以下工作:
(1)完成系统的总体设计,分析了手动操作意图检测方法,创新性地提出了基于目标检测算法的手动操作意图检测方法,并通过开关柜操作规范,设计了警报输出逻辑表。
(2)利用USB摄像头采集开关柜操作图像,制作了训练数据集,对HOG+SVM、Faster R-CNN、YOLOv3和YOLOv4,4个算法展开模型训练,通过对模型检测速度和检测精度的对比,选择将YOLO算法部署到Jetson Nano嵌入式设备上。
(3)用Jetson Nano嵌入式设备搭建了手动操作意图检测平台,对YOLO模型进行了模型剪枝和TensorRT推理加速两步优化操作。将剪枝后YOLOv3模型进行TensorRT推理加速,经过TensorRT推理加速,YOLOv3模型在Jetson Nano嵌入式设备上的检测速度达到了25FPS。
(4)完成了系统的软硬件部分,其中设计了警报判断输出单元电路原理图和PCB图,打印并焊接了警报判断输出单元的电路板。
参考文献(略)