1 绪论
1.1 课题研究的意义和背景
电力系统的发展经历了很漫长的过程,已经成为一个超大型和超繁杂的集合。在国内,特别是近十年,用电负荷不断攀升,为了适应电力市场需求,国家电网公司不断进行技术升级,并投入大量人力、物力、财力发展电网,高压、超高压、特高压输电线路遍地开花,呈现一副欣欣向荣的局面。由于能源储备具有地域限制性,因此,远距离、大容量输电以及大电网互联将是我国电力系统未来重要发展方向之一。高压输电能够解决中国因为地域广博而造成的现有输送能力不足的问题,通过调配各地资源优势,因势利导,减少投资成本,降低输送过程中的电能损耗,一定程度上提高了输电效率。高压输电线路是电力系统的重要组成部分之一,是电能从发电厂运送到用户手中的渠道。随着经济社会的发展,电力变成人民群众生活不可或缺的一部分,同时也对电力系统的稳定性、安全性、可靠性提出了更高的要求。高压输电线路由于电压等级较高,所以一般设计分布的区域较广,尽量远离人口密集地区,运行环境相对恶劣,且长期暴露在户外空气中,受温度、湿度等外界环境因素的影响,容易发生故障。因此,当高压输电线路发生故障时,能否快速、准确地找到故障点,并应用专用工具排除故障物,是确保高压输电线路恢复正常运行的关键所在。根据故障程度不同,可以将高压输电线路的故障分为永久性故障和瞬时性故障。永久性故障是指不及时维修就不能恢复设备正常运行状态的故障,多是由于设备本身绝缘、结构等发生损坏而造成的。瞬时性故障,又称非永久性故障,是指故障之后,通过重合闸等措施,能够自行恢复原来的状态,多是由树枝、塑料薄膜、布条等可燃性异物造成的。瞬时性故障一般占线路故障的 90%~95%。对于瞬时性故障,特别是闪络等瞬时性故障常会对导线造成损伤,一般会留下烧伤痕迹,但是这种痕迹并不明显,往往需要电力巡线工人借助高倍望远镜沿着导线仔细寻找,一般很难查找到故障点。如果没有准确的定位,就需要耗费很大的人力和很长的时间进行线路特巡,直到找到故障点。因此,高效、快速、准确的找到故障点,不仅有利于尽快排除隐患,而且有利于采取积极有效的预防措施,防止其发展为永久性故障,避免为电力用户造成停电困扰。特别是一些分布在崇山峻岭之中、跨越河流湖泊之上的高压输电线路,一旦发生故障,故障点位置更难确定。即使使用直升飞机来巡视,也往往由于恶劣的天气难以实现,故障停电期间会造成很大的经济损失[1]。因此,高压输电线路的故障精准测距就显得尤为重要。如果能够通过算法的改进准确找到故障点,就能快速修复因故障造成停电,将会大大缩短电力客户停电时间,降低供电企业的人力、物力、财力消耗,具有一定的理论和现实意义。
........
1.2 国内外研究现状
纵观故障测距的发展历程,长期以来,国内外专家一直在对故障测距方法进行研究。但早期的故障测距方法由于受到社会发展程度和科技发展程度的掣肘,测量工具和仪器也不够准确,测距精度并不高也不可靠,而且当得到测量数据后还需要操作经验和工作经验非常丰富的人根据实际工作经验才能做出相应的判断。随着科技的发展,故障测距技术也在不断发展,经过多年学者们的研究,各种新的算法原理不断涌现,为了能够得到更精准的故障测距方法,研究者们付出了辛勤的劳动。特别是二十世纪七十年代以来,随着国内科学技术的全面复苏,电力系统及其自动化水平也相应提高,各种精密仪器相继问世,给精确定位带来了契机。其中还包括国际上计算机学科的发展、微机继电保护的不断创新、故障录波器等先进仪器仪表和设备不断发展,融入到电力科学的发展中来,更有力的促进了故障精准定位的发展。从应用原理的不同基本故障测距的方法可以分为故障分析法和行波法[2]。故障分析法是当高压输电线路发生故障时,根据电路系统有关分布参数和测量点的电压或电流列出相应的函数关系式,然后对其进行分析和计算,求出故障点到测量点之间的距离,这是一种普遍采用的方法。故障分析法又可分阻抗法、电压法和解微分方程法。根据所使用的电气量的不同,故障分析法又可分为单端电气量算法和双端电气量算法(简称单端法和双端法)。单端电气量算法是通过测量端测得的电压和电流等得到的数据,可计算出故障位置的测距算法[3]。单端量法的优势很明显,具有投资少、稳定性高、简单可靠的优点,并且在实际应用中得到广泛采纳。为了提高单端测距的精度,国内外专家对此进行了多种算法的改进,不断对其进行深化研究。
.........
2 行波法在高压输电线路故障测距中的仿真研究
2.1 行波的介绍
2.1.1 行波的基本概念
正常的交流电在输电线路中传播时,是以规律的正弦波的形式传播的,而行波即平面波在传输介质上的一种传输状态。当线路中间发生故障时,故障点的波阻抗会发生变化,继而产生向两个方向传播的电流行波与电压行波,在这两种行波里面,蕴含着很多故障信息,这些故障信息沿着电流波或电压波以行波的形式传递出去。行波法故障测距就是通过采集这些行波信号来分析计算出故障的所在位置。
2.1.2 行波的折射和反射
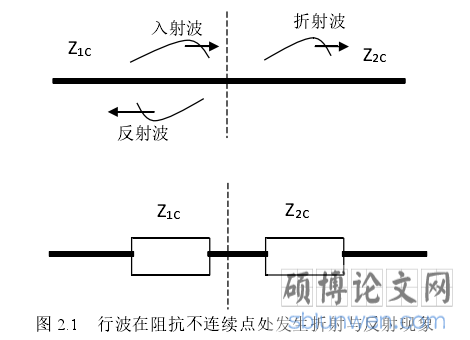
对于正常的输电线路都是相对均匀的,在输电线路中行进的电压波和电流波满足波阻抗 Z 的关系,但是当输电线路发生故障时,其故障点波阻抗发生急剧变化,对电流波和电压波也产生响应的影响,并且行进中的波(行波)将会在波阻抗发生变化的地方产生波的折射和反射,折射波和反射波向相反的方向传播,如图 2.1 所示。
........
2.2 行波法故障测距的原理
单端电气量行波测距原理是在母线一端安装检测录波装置,并利用由故障点所产生的暂态行波,由于暂态行波向两个相反的方向等速传播,第一个行波波头到达母线检波器的时间和由故障点波阻抗反射回来的第二个行波波头到达母线的时间差来实现测距[6],如图 2.2 所示。设线路全长为l,录波器安装的 M处,行波波速取 v(接近光速,具体取决于线路分布参数,一般取光速),两个波头到达的时间差是 Δ t,则故障点到达检波器的距离可由下式表示:双端行波法故障测距的原理需要两个测距点,由于需要实现时间上的同步,所以需要构建专门的信息通道来校准时间。故障发生后会产生行波信号向两个方向传播,行波以电压或电流为载体进行传播,其带有故障的信息在里面,通过对故障信息的分析,可以测算出故障地点。行波信号物理意义上讲是一种高频暂态信号,这就对传感器提出了一个新的要求,同时要求该传感器具有很高的特性,不产生扰动波。目前,行波信号的采集大多是从互感器中的电压或电流所产生的。
............
3 无人机清障装置研究 ........ 20
3.1 研制背景说明 ............20
3.2 无人机巡检介绍 ........21
3.2.1 电力系统无人机的发展历程 ............21
3.2.2 无人机的分类..........23
3.2.3 无人机在架空输电线路巡检中的应用.....24
3.2.4 多旋翼巡检.....24
3.2.5 固定翼巡检.....26
3.3 无人机清障装置的研制 .....29
3.3.1 无人机的选择..........29
3.3.2 清障装置的设计 .....31
3.4 强风应急返回模块设计 .....34
3.5 故障测距结果在无人机清障过程中的应用 .........37
3.6 确认效果 ...........40
3.6.1 安全效益.........42
3.6.2 经济效益.........43
3.7 本章小结 ...........43
4 总结和展望 ...... 44
4.1 总结 ..........44
4.2 展望 ..........45
3 无人机清障装置研究
3.1 研制背景说明
每当大风天气,都会有很多轻浮异物像风筝、塑料薄膜、飘带、树枝等挂到高压输电线路上,可能引起单相短路或相间短路,进而造成跳闸故障。电力工人需要及时清除异物以防止跳闸事故的发生,目前经常采用的方法有电力工人乘坐绝缘斗臂车接近导线用绝缘操作杆清除异物或者电力工人爬到塔上抛绝缘绳挂于导线上进行摩擦的土方法,再或者如图 3.1 所示,通过停电电力工人爬到导线上人工清除,这些作业方式都需要接近带电导线,既有高压危险,又有高空危险。随着科技的发展,对于导线中央悬挂异物方面,为了提高电力工人工作的安全性,急需要研制一种新的作业工具来代替现有的作业方式。无人机(Unmanned Aerial Vehicle),即无人驾驶的飞机,是指具有导航定位、飞控微型计算机、无人乘坐等航空设备,利用无线电遥控或特定的飞控系统可进行半自动飞行或自主飞行的飞行器。随着科学技术的不断发展,新型输电线路巡检技术不断涌现,其中以直升机、无人机巡检为代表以其独特的操控性和全面性逐渐被世人接受并成为未来发展方向之一。与传统的输电线路巡检方式相比,无人机具有轻巧、体积小、易操控、方便携带等优点,大大减轻了巡检工人的负担,而且无人机可以随时随地起降,相对容易操控,不用巡检工人亲自登上铁塔就可以得到最详细的信息,而且现在无人机技术已经相对成熟,飞行停顿稳定,可以远程操控无人机进行拍摄、拍照、甚至代替人力进行除障等作业,给电力工人带来了大大的福音。同时,无人机还具有载重能力,能够搭载红外检测设备对输电设备进行红外测温,还可以搭载高倍相机对铁塔、线路各部件进行拍照,还能对整条线路进行拍摄工作,使运行人员了解线路通道的具体状况,通过这些成像资料的收集汇总,可以帮助电力部门准确预报线路运行状态,及早发现隐患、缺陷、故障,并及时处理,很大程度上解放了劳动力,帮助线路运检人员降低人工巡检的危险性和巡检成本,带来很大的经济效益和社会效益,工作效率得到大大提高。
.........
总结
本论文主要从两个方面进行了探究,一是利用故障精准定位的研究,二是研制成功了一种无人机清障装置,并将故障精准定位得到的故障位置应用到无人机清障装置中去,使得无人机能够精确找到故障点,取得了良好的效果。
(1)高压线路上行波法故障测距对于故障的精准定位、节约巡线工人穿山越岭的寻找故障点,并且根据测得故障距离迅速找到故障点具有深远意义。本论文第二章主要是在高压线路暂态量保护的基础上,很好的利用行波法和小波变换理论,重点研究了如何选择小波基,提取模极大值,找到故障点位置,在此算法基础上,研究在高压输电线路上,对比研究过渡电阻和故障相角对行波法故障测距的影响。最终得出结论如下:1)确定了暂态保护中小波基的选择原则。众所周知,高压线路故障暂态信号大都具有非线性相位,从而降低了对小波对称性方面的要求。由于小波基的性质相互牵制,效果很难达到最佳,但从仿真效果来看,db4 小波分析暂态信号具有很大的优越性。2)仿真结果得出,过渡电阻和故障相角对行波法故障测距没有影响,大大体现了行波法故障测距的优越性。利用小波变换理论的模极大值法可以准确测算出距离。
(2)故障测距测算出故障点位置,就需要用最快捷的方法清除异物,由于大部分造成跳闸的异物都是易于清除的塑料或者木质物,故研制成功了一种无人机清障装置。通过不断的尝试,不断地查阅资料,克服重重困难,利用头脑风暴法,对各种选材和装置的选配进行了大量的试验,最终研制成功了无人机清障装置。并且设计了多旋翼无人机强风应急返回策略,对无人机遇到超过五级强风时能够自主返回起飞地点。而且将前期故障精准定位所得到的的结果结合国家电网开发的 PMS 系统所具有的坐标参数定位到故障点精确位置,将此结果传输给无人机 GPS 系统,通过设定,使得无人机能够精确悬停于故障点附近,减轻了人力寻找的麻烦,进而进行精准除异物,在研制过程中虽然遇到了很多困难,但大家戒骄戒躁,不断遇到问题,不断解决问题,使理论成果转化为生产力。在实际应用中,很好的提高了线路工人的工作效率,保障了人员的安全性,推动了带电检修作业向标准化和智能化迈进。
..........
参考文献(略)