第 1 章 绪论
1.1 研究背景及意义
1.1.1 研究背景
随着当前工业大环境的发展以及控制科学领域研究的日趋成熟,自动化作为一种解放劳动力、提高效率效益的工业运行模式,在各工业场所中被广泛应用。在自动化运行条件下,设备按照设计好的步骤进行生产作业,整个流程不需要过多的人为参与[1]。我国是煤炭生产大国和消耗大国,自动化的种种优势也十分契合煤炭行业的前景和要求。发展煤炭行业设备及工业流程自动化,对于提高工矿企业生产效率、经营效益以及生产安全等,有十分重要的行业价值。
随着工业 4.0 的不断推进,煤炭综合自动化也随之不断进步,自动化选煤正在成为选煤工艺新的发展方向[2]。选煤厂块煤煤仓是洗选煤炭产品的中转储存地点,具有缓冲外运压力、集中产品输出的作用,是选煤厂重要的生产场所。对于块煤煤仓而言,实现入仓工艺的流程自动化控制和各生产设备的协同控制,是煤仓入仓自动化的核心内容。目前选煤厂块煤煤仓的入仓工作主要由装仓小车完成,装仓小车是煤仓仓上的轨道机械行走设备,通过走停、开档闸板等动作完成块煤入仓配仓。现有的装仓小车控制模式是人工操作,岗位司机全程跟随,通过司机观察判断仓位情况后选择装仓地点,手动控制装仓小车停止后下放闸板溜煤装仓;在煤位到达临近仓口位置时,手动控制升起闸板,停止装仓,再控制装仓小车行走,寻找下一个装仓地点。由于是人工操作且装仓小车是移动设备,因此存在于入仓工艺全流程中的肉眼探灯判断煤仓仓位、岗位司机随车奔走、装仓小车停位不当等等问题,都会成为堆煤、溢煤,甚至人员事故的安全隐患。在现有条件下,实现无人装仓、提高自动化程度、降低人力甚至无人值守,不仅保证了安全,同时提高了效率,对选煤厂而言,这样的技术、装备和系统是十分必要的。
晋能控股煤业集团赵庄矿选煤厂是设计生产能力为 6.0 Mt/a 的新型矿井型选煤厂,选煤厂的主要产品有洗块煤、洗末煤、优末煤和标末煤[3]。块精煤分别进入两个洗中块仓、两个洗小块和一个粒煤仓内。洗中块、洗小块均为东、西两个仓,每个仓存储能力为 2200 t(长 30 m 宽 12 m 高 20 m),装仓小车的移动距离全长 75 m。在赵庄矿选煤厂煤仓车间里,目前是由岗位司机手动控制装仓小车运行及完成煤炭产品入仓配仓作业。具体的入仓工艺为:在需要块煤入仓时,首先启动皮带输送机,块精煤通过皮带输送机运至煤仓车间,再由架设在运煤皮带上的装仓小车以及对应煤仓落煤口的螺旋溜槽,最终落入煤仓完成入仓配仓。现阶段入仓作业完全由岗位司机手动完成,劳动强度大;观测煤仓仓位是探灯从落煤口照射煤仓内部,由岗位司机肉眼判断,误判概率大,易发生溢仓、堆煤事故;装仓小车处于移动状态,岗位司机操作时随车奔走,危险系数大;入仓过程中,设备之间都是分立、单独进行控制,没有协同控制。
.................................
1.2 国内外研究现状
1.2.1 装仓小车控制技术研究现状
煤仓装仓小车是煤仓上主要的煤炭分流、入仓设备,是机械结构、可移动设备。装仓小车的动力供给和运行条件与胶带输送机、牵引机车等矿用机电设备一致,基本上都是电机作为动力源。因此对于装仓小车的控制技术,主要分为手动模式和自动模式两种。手动模式即是人工手动按键,通过给行走电机上电、断电来控制装仓小车启停;自动模式则是装仓小车根据人为设定的运行程序,按照程序流程自动控制,只需较少人参与运行过程。近年来,有许多学者和从业人员进行了装仓小车控制技术的研究,在装仓小车自动化运行的基础上,引入了很多先进的自动控制原理内容,从而使装仓小车控制技术的发展越来越适合生产实际与工矿企业自动化、智能化建设。
淮北矿业(集团)股份有限公司张明泉等[8]进行了选煤厂配仓移动小车自动控制系统研究。他针对入仓过程中的诸多问题,如人工现场操作移动小车劳动量大、肉眼观察仓存准确度差、煤仓仓上环境差、消息误传或错传等,提出了一种配仓移动小车自动控制的思路及系统组成,搭建了一套 PLC 控制系统,利用超宽带、重锤式物位计及信息通讯等技术,开发 PLC 程序和上位机画面,通过软件和硬件结合实现配仓移动小车自动控制。简要的介绍了超宽带定位技术原理和重锤式物位计原理,以及目前所能实现的功能。最后,针对该配仓移动小车自动控制系统的持续改进以及功能完善进行了展望。西南交通大学机械工程学院郭恒瑞等[9]设计了基于 PLC 的装煤平车线监控系统。目前煤矿铁路运输中的装煤平车线中存在因自动化水平不高而影响生产效率的问题。他对于这些问题,利用自动化控制技术,在明确了控制设备和控制要求的前提下,以各个子系统的信号情况为依据进行了 PLC 硬件选型,组建电气系统,同时完成整个系统的电气控制逻辑图。之后利用 WinCC 上位机组态软件,创建上位机控制系统,通过不同窗口界面完成对智能装煤平车系统的实时监控、图表趋势和工作报表功能,操作简单,安全高效,有效提高了生产线的自动化程度,完成了对整个产线的集中控制,大大减轻了操作人员的工作强度。
........................
第 2 章 块煤自动入仓系统整体控制架构及关键技术研究
2.1 系统整体控制架构研究
2.1.1 原有控制模式分析及存在的问题
现阶段一般动力选煤厂煤仓作业全部由人工进行。在该选煤厂中,洗选加工的流程与一般选煤厂一致,即首先将原煤按照粒度、煤质煤种的不同进行初步分离,分离后的原煤分别进行重选和浮选,这时原煤成为精煤产品[23]。由于在洗选前已经进行了配煤,因此经过洗选的精煤产品已经是分好种类的,精煤产品由胶带输送机运至煤仓仓上,再由入仓设备完成精煤产品入仓,最终在煤仓仓下放煤口放煤,通过汽车运输或火车运输完成外运。煤仓此时作为精煤产品的存储中转地点,煤仓仓上的入仓工艺流程由岗位司机全程手动操作。当需要开启胶带输送机输送精煤产品入仓时,由集控室提前给岗位司机对讲机发送指令,岗位司机按动按钮启动装仓小车,先不移动,由岗位司机探灯探照煤仓内部观察煤位情况以确定装仓点,然后将小车移动至该装仓点处等待胶带输送机开启。胶带输送机运载煤流到达煤仓车间时,岗位司机再次按动按钮启动装仓小车,同时按动按钮打开螺旋溜槽挡板,开始装仓。岗位司机根据经验估计装仓时间,不时通过手持探灯观察煤位,当煤位临近仓口时,手按按钮松开抱闸抱轨,下放卸料挡板,然后移动装仓小车至临近装仓点处,重复上述操作。
由上面的说明可以看出,现有的煤仓入仓工艺操作模式全程人工操作,操作过程中,无论是入仓设备还是操作人员,都存在很多问题,分析如下:
(1)岗位司机劳动强度大。煤仓入仓工艺流程中,岗位司机全程参与且只有他一人操作,一般煤仓全场较长,外加附带的小块煤仓及仓上皮带,工作强太大。在这样大的劳动强度及较恶劣的工作环境下,操作人员极有可能出现误操作或其他危及安全的事故。
(2)全部入仓设备没有协同控制。从前述的说明中可以看出,整个过程中的入仓设备之间没有联动关系,都是分立的。这种情况下,所有设备的启停时机、工作顺序以及相互配合都是无法进行的。对于流程工业而言,同一工艺流程的设备实现协同控制及运行,可以提高工艺整体效率,并且也是进行自动化乃至智能化建设的前提内容。
(3)煤仓仓位及装仓时间无法准确获知。岗位司机通过手持探灯照射煤仓内部观察煤位,由于煤仓仓深较大仅凭探灯照射观察,即发生误判,从而可能因为煤位误判进一步引发装仓点选择不当、堆煤溢仓甚至安全事故。另外在煤仓入仓过程中,由岗位司机经验估计装仓时间。没有准确直观的煤位作为生产凭据,一系列的生产操作就必然会受到影响,甚至会引发安全事故。
.....................
2.2 移动检测技术研究
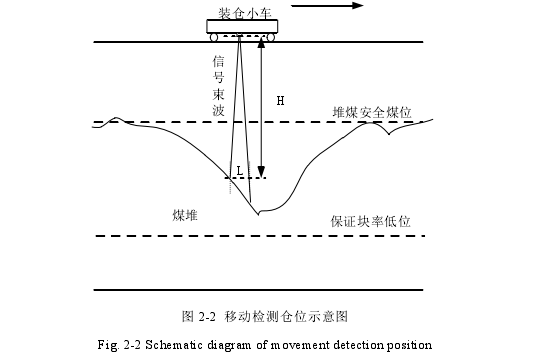
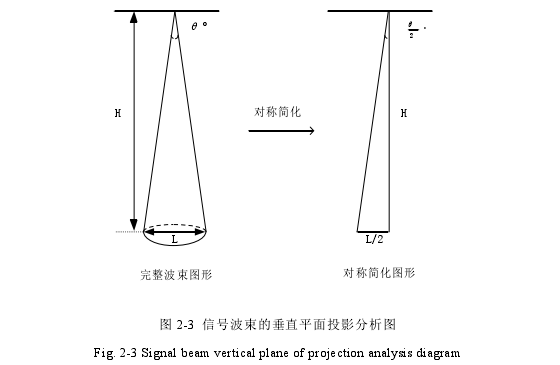
2.2.1 移动检测仓位技术分析
煤仓仓位作为整个系统中最重要的数据,在控制过程中扮演着无可取代的角色,因此需要准确检测煤仓仓位。现有的选煤厂煤仓仓位检测模式大都是在煤仓中安装仓位计,以获取仓位信息,但这种方式传感器使用数量多、维护强度大且人工观测易混淆。为了解决这些问题,在本设计中考虑在装仓小车上随车安装仓位计,在装仓小车移动过程中连续检测仓位,这样减少仓位计数量及信号数目,简化控制模式,降低维护及人工成本。在解决就问题的同时,随之而来的新问题是:如何让在小车移动过程中准确检测仓位,这是本系统设计的关键和难点。
..............................
第 3 章 煤仓入仓过程实时及预测性动态仿真研究 ........................... 23
3.1 仿真系统研究 ...................................... 23
3.1.1 入仓过程实时性动态仿真研究 ........................................ 24
3.1.2 填仓预测性动态仿真研究 ......................................... 25
第 4 章 块煤自动入仓系统设计 ....................................... 33
4.1 块煤自动入仓系统流程设计 ........................................ 33
4.2 硬件架构设计 .......................................... 35
第 5 章 块煤自动入仓系统的实现及运行效果分析 ..................................... 53
5.1 基于移动仓位检测的装仓小车控制系统的实现 ................................... 53
5.1.1 主-从双控制柜联合控制模式的实现 .................................... 53
5.1.2 基于移动仓位检测的控制模型的实现 ................................... 57
第 5 章 块煤自动入仓系统的实现及运行效果分析
5.1 基于移动仓位检测的装仓小车控制系统的实现
5.1.1 主-从双控制柜联合控制模式的实现
基于上文中对主-从双控制柜联合控制模式的必要性和解决通讯问题的分析阐述,在系统设计中采用该主-从双控制柜联合控制模式,即在装仓小车上安装一个主防爆控制柜,然后在煤仓仓旁安全性人道侧中部位置安装一个从防爆控制柜,两个防爆控制柜之间采用无线 WiFi 通讯方式进行数据交互。操作时岗位司机只需在从防爆控制柜上给装仓小车等设备一个启动信号,接着块煤自动入仓系统便由设定的系统流程自动化作业,解放岗位司机,不需要时时看守。具体的主-从双控制柜模式实现方式,体现在硬件布置和软件程序设置上面,具体如下:
(1)实现主-从双控制柜控制模式的硬件布置
硬件布置包括防爆控制柜布置和无线防爆网桥布置两部分。首先是主防爆控制柜和从防爆控制柜的布置,主防爆柜采用山西艾迪森电气有限公司生产的矿用隔爆兼本质安全型五回路低压真空电磁启动器,它内部空间大、封闭性好,适用于煤仓仓上这种煤尘大、防爆要求高的工业场所。柜体正面是操作控制面,上面有全部块煤自动入仓系统相关的操作按钮及数据状态显示组态屏幕,主防爆控制柜外形如图 5-1 所示。主防爆控制柜内部电路背板上布置系统控制电路,该系统控制电路以 S7-1200PLC 为核心,搭载 4个输入输出模块及涵盖装仓小车 2 个电机控制、油泵控制、卸料挡板控制及抱闸抱轨控制在内的 5 个回路电路,如图 5-2 所示。从防爆控制柜采用山西艾迪森电气有限公司生产的,区别于主防爆控制柜,其柜体正面的操作控制面按键较少,只提供了启动及急停等必须的按钮和显示触摸屏,并没有控制全套设备的所有按钮,只是供岗位司机可以在安全位置启动块煤自动入仓系统自动化运行即可,外形如图 5-3 所示。从防爆控制柜柜内的控制电路配置一个 S7-1200PLC,除过按键电路外并没有全套的控制回路,设计思想也是基于能够启动和急停等基础操作即可,柜内电路面板如图 5-4 所示。
第 6 章 结论与展望
6.1 结论
块煤入仓作为选煤厂洗煤产品中转过程的主要工艺流程,是影响选煤厂洗煤产品存储、块率及运输的重要环节。高效的自动化协同控制方式及准确的流程动态仿真系统可以提升煤仓入仓过程的生产效率。在煤仓仓上块煤入仓的工艺流程中,涉及到包括装仓小车、油泵、抱闸抱轨装置及卸料挡板等设备协同工作,以装仓小车为主体,配合各种传感器件及入仓机电设备实现块煤产品的入仓和中转存储。由于提升煤仓入仓工艺的自动化程度对于改善岗位司机操作环境、提升工作效率及保障安全作业等方面有着直接的影响,而且因为岗位司机随车奔走,也容易造成误操作影响仓上正常生产秩序,所以对于块煤自动入仓系统的设计是十分有必要的,需要构建契合煤仓入仓工艺的自动化运行系统及便于监测与预测的仿真画面平台。本文以晋能控股煤业集团赵庄矿选煤厂煤仓为研究对象,通过对煤仓仓上入仓过程的现状和改进需求进行分析,实现煤仓入仓工艺的自动化生产、实时及预测性监控,从而达到节约能源、减员提效、安全生产的目标,建立对煤仓块煤自动入仓工艺流程完整的仿真平台。
(1)通过查阅文献了解本文的研究背景,以晋能控股煤业集团赵庄矿选煤厂煤仓入仓工艺流程为研究主体确定了文章的研究内容,并且制定了技术路线。以升级改造自动化控制方式、提升生产效率和安全程度为根本,以实现基于移动检测仓位的装仓小车控制、提升入仓设备协同控制程度的整体系统控制架构及达到提高生产效率、安全程度的控制方式为目标。
(2)针对块煤自动入仓系统的技术工艺对研究对象的控制系统做出详细的分析,把整个流程分为了块煤自动入仓整体控制架构、煤仓入仓过程实时及预测性动态仿真、块煤自动入仓系统设计三个部分,通过对三个部分进行分析,得出了可以实现块煤自动入仓系统的设计内容和方式,从而摆脱原有控制模式的弊端和限制,最终根据技术路线及各组成部分的研究,对硬件架构及软件架构的方案进行设计。
(3)为了节约寻找落料区间的时间、提高生产效率,设计了一种基于移动检测仓位的装仓小车控制模型。通过块煤自动入仓系统的仓位信号收发与装仓小车运动之间的关系,对装仓小车实时运动速度和煤仓仓位进行联合分析,保证在装仓小车实时运动速度下,雷达料位计始终可以准确对应收取该区间的仓位数据,不会因为装仓小车运动而造成仓位数据错动,以便提升控制精度和生产效率,并且对模型进行了数学关系推导,得出反映煤仓仓位数据与装仓小车实时运动速度关系的表达式,使得该模型在本系统中的实现更具有实操性。
参考文献(略)