本文是一篇电气自动化论文,本文针对单纯使用里程计对轮式机器人进行位姿估计极易发散与单独使用GNSS导航会出现信号丢失等情况,提出了一种基于GNSS/INS/里程计的多传感器融合定位模型。
第一章 绪论
1.1 课题研究背景
随着科学技术的不断进步和发展,导航定位系统逐渐进入我们的视线中。进入21世纪之后,自动驾驶、无人机等领域逐渐进入公众视野,导航技术作为一种基础的也是最重要的一种技术,导航定位技术在日常生活、经济发展、地图测绘和军事设施的更新迭代中都发挥出了不可替代的作用。导航技术在传统的地理测绘、应急救援消防等都起到重要的支撑作用,特别是在军事中,对导航定位的性能和稳定性提出了更高的要求。尤其是在近几年,随着互联网技术的快速发展和广泛的普及,利用互联网可以将多种定位方式相结合,将定位导航技术的发展推到新的高度,包括室内外高精度无缝衔接定位,对于基于WiFi,蓝牙和UWB等定位技术,在机器人导航中都有不可或缺的作用[1] 。目前在室外定位中,巡视机器人需要在多定位传感器的配合下才能在复杂的室外环境中,能够确保机器人在单一传感器受到干扰或者出现定位信息出现漂移之后,能够及时对其进行修正[1] 。
卫星导航是基于导航卫星广播的导航无线电信号,用户的导航接收机对这种无线电信号进行接收并进行相关的数据解算实现定位。目前,美国GPS(全球定位系统);中国BDS(北斗卫星导航系统);俄罗斯GLONASS (全球导航卫星系统)以及欧盟Galileo(伽利略卫星导航系统)是全球导航卫星系统[3] 。部分国家还建立了基于全球导航卫星系统的基础之上区域增强系统,包括日本QZSS(准天顶卫星系统)和印度IRNSS(区域卫星导航系统)[4] 。随着各大全球导航系统的不断优化以及不断完善,且卫星的信号质量和飞行轨控方案的改进优化,不同种类之间的导航卫星的组合可以对单一导航卫星系统进行完善[5] 。此外,导航卫星定位在开阔的室外环境下可以获得较为良好的定位性能,在城市密集的高楼、隧道和桥梁等环境下,卫星信号容易受到这些建筑物的干扰,导致接收机的接收天线不能对导航信号进行较为良好的接收,信号出现较大的漂移,这时导航系统不能为用户提供较为准确的定位服务,定位信息解算结果出现较大的漂移[6] 。
...............................
1.2 课题研究意义
目前,对于轮式机器人导航通常使用轮式编码器和惯导单元进行导航,也可以使用简单单点定位与惯导单元相结合进行定位,这种定位方式所需要的GNSS接收机结构简单、可靠性较高,但是这种方式受限于定位原理,常常会因接收机的移动受到环境中不可控的干扰因素干扰,从而导致其定位精度较低。本文通过结合各种传感器的优势建立合适的定位数学模型,机器人可以在室内和室外均能拥有较好的定位效果[56] 。
近些年,随着GNSS定位系统以及INS定位的快速发展,利用GNSS和INS进行定位的技术在军事和航空航天领域得到广泛应用,针对GNSS和INS组合定位方式的深入研究,将组合导航定位在机器人领域得到应用,这对于机器人导航精度改善起到不可或缺的作用[8] 。本文通过对GNSS定位误差,机器人轮式编码器误差,惯导误差以及多传感器融合后的误差进行分析,对导航的精度进行提高。主要研究意义包括:
(1)在室外复杂的变化的环境下,定位信号在从卫星传输到接收机的信号接收天线过程中容易受到包括大气扰动、对流层中的天气因素的干扰,导致接收机对卫星信号解算时解算结果出现漂移,利用多个定位导航系统可以使得可用卫星数目的增多,增强可靠性[9] 。另外,卫星的高度角也会影响到观测质量,对于高度角较低的卫星,这种卫星的定位信号在向接收机传播时,由于高度角较低,需要穿过相对于高度角较高的卫星更厚的大气层,大气干扰带来的定位误差更加明显,这会降低观测信息质量甚至会导致卫星信号出现中断。对于双频定位接收机,根据接收机观测卫星信号质量进行分步逐级固定,这种解算方式在室外复杂的实地环境下能够保持较高的观测质量,从而获得较为准确的定位数据[10] 。
...........................
第二章 差分驱动轮式机器人整体设计
2.2 差分驱动轮式机器人系统总体方案设计
2.2.1 轮式移动机器人的外观设计
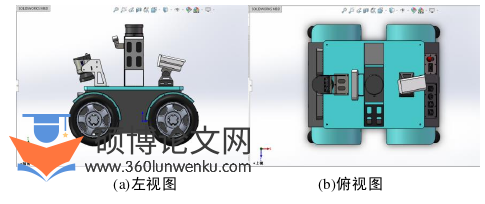
利用3D设计设计软件-Solid Works2020版本完成对机器人的外观三维结构设计,设计中机器人的底盘车轮尺寸根据轮式机器人的要求设计为800mm 700mm 360mm(长宽高,只是底盘尺寸),同轴车轮距离为700mm,轴距为600mm,机器人根据实际的定位需要在上方安装GNSS (Global Navigation Satel -lite System)传感器和IMU(Inertial measurement unit)惯导模块,据此来实现多传感器的融合定位。
机器人的三维车体设计三视图如图2-1所示:
电气自动化论文怎么写
2.2.2 轮式机器人硬件设计方案
机器人设计需要满足当前实验性能需要和未来对机器人性能的改进,包括以下几点要求:
(1)轮式机器人动力强劲,结构稳定,能够适应复杂的室外环境以及在恶劣的实验条件下保持良好的定位性能。
(2)硬件系统需要抗干扰,在室外环境下,需要面对复杂的干扰,包括无线电干扰和磁场的干扰。从而在复杂的实验环境下保证传感器实时采集到的数据信息准确、稳定、可靠。
(3)机器人的控制单元(工控机)需要有良好性能的数据传输与处理能力,能够及时将机器人传感器发送来的数据进行处理,包括编码器(轮式里程计)、三维Velodyne激光雷达、二维激光雷达、IMU传感器、GNSS传感器、摄像头等数据进行处理。同时还能够利用远程上位机实现远程机器人控制。
综合以上性能要求,实验平台选择四轮的差速轮式机器人,同时为了提高机器人的定位性能,需要引入多个传感器的定位数据进行组合定位。
..........................
2.3 惯性导航系统坐标系
2.3.1 惯性坐标系
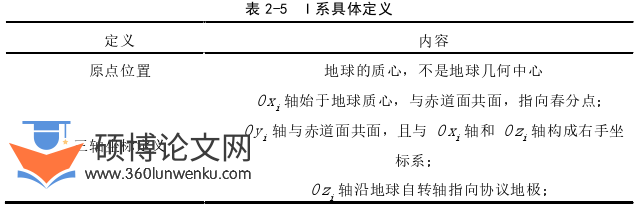
惯性坐标系(Inertial frame,也称作I系)在定位解算中需要使用到的坐标系也称作地心惯性坐标系,其参考原点是地球的地心(设为O点),该坐标系作为惯性导航传感器输出的基准。通常,该坐标系原点是以恒定的速率运动。
另外具体定义如表2-5:
电气自动化论文参考
......................
第三章 多传感器融合定位算法介绍 .............................. 23
3.1 引言 ........................................ 23
3.2 机器人位姿估计 ............................ 23
第四章 多传感器融合定位仿真和实验测试 ............................... 40
4.1 引言 ................................. 40
4.2 GNSS/INS融合算法与仿真分析 ............................ 40
第五章 移动机器人定位系统测试与分析 ............................... 54
5.1 引言 ................................... 54
5.2 室外实验介绍 ............................ 54
第五章 移动机器人定位系统测试与分析
5.2 室外实验介绍
5.2.1 实验准备
本文实验在石家庄铁道大学校园内进行,数据采集现场如图3-1所示,实验时采集信号使用的GNSS接收机是Swift公司生产的Swift Navigation接收机,该型号的接收机支持GPS/GLONASS/Beidou/Galliano/QZSS系统的全频点信号,Swift Piksi Multi接收板支持GPS L1 / L2 / L5,GLONASS G1 / G2,Beidou B1 / B2,Galliano E1 / E5b四个系统的频段的信号,定位接收机天线使用HarxonGPS-500天线,该天线可以接收GPS L1/L2/L5、GLONASS L1 / L2和北斗B1/B2频点的定位信号,接收机单元处理器使用FPGA和双核ARM-cortexA9高性能处理器完成导航定位无线电信号解算,良好的兼容性便于用户开发与系统集成。使用基准站和游动观测站进行RTK模式下的毫米级定位,并完成本次的定位实验。数据采集时间为2021年6月13日,采集时长为1小时,数据采集速率为10Hz。将GNSS定位接收机的RS232数据口通过串口转换和电脑USB相连,用于保存接收机实时产生的数据。
首先调试基站设备,将基站选择一个固定地方进行安置,通过采集20分钟的数据,观察接收机在静止状态下的随机游走,实验过程中,将接收机天线固定在轮式机器人顶部,并将轮式机器人置于校内广场的空旷地带,通过RS232串口将Swift Navigation接收机开发板串口和计算机相连,使用rtk-strsvr软件读取接收机串口数据并记录观测数据,并用rtklib开源定位导航数据结算软件进行分析,实验场地如图5-1所示。
为了验证利用INS辅助GNSS定位的有效性,使用本论文设计的底盘差分轮式机器人作为实验平台进行实验,轮式机器人携带有GNSS导航系统信号接收天线和用于导航信号解算的处理单元、IMU惯导模块以及为GNSS定位所需的电源,机器人行走时利用工控机控制,机器人在室外不同的环境下进行定位信息的采集,进行多传感器融合定位实验,并对轮式机器人里程计、GNSS接收机定位信息进行记录,实验场地是校园内的小广场,环境空旷,无较大的通信设备干扰,有着良好的电磁环境,利于导航系统的天线工作。利用rtklib 2.4.2软件,把室外测试接收到的数据导入到该软件中,对GNSS接收机在运行时的数据进行解算,将其结果作为定位、测速的参考。
电气自动化论文参考
....................................
第六章 总结与展望
6.1 总结
机器人能够在复杂的环境下获取准确的实时定位信息,是实现机器人各种各样功能应用的重要基础部分,例如智能机器人在校园巡视,或者在变电站巡检等,机器人定位技术经历了多年的发展,定位技术经历了多代的升级更新,从最初的利用车轮里程计定位到后来的惯导和轮式里程计融合定位,解决了里程计单一传感器定位方向的精度较低的问题,后来随着GNSS系统的发展与完善,从单一的GPS系统到多导航系统的卫星定位实现,这样大大提高了定位的准确性,该定位技术随着时间的推移,不断发展和完善。在多传感器的融合定位中,利用各个传感器的特点实现机器人在复杂的环境下具有较强的环境适应能力,使用EKF算法进行融合,对于单一传感器失效的情况下可以继续保持较好的定位精度。本文基于GNSS、INS、里程计等传感器进行融合,使得轮式机器人的定位更加准确,本文的主要工作以及创新有以下方面:
(1)对轮式机器人进行设计和运动模型的建立与分析,对目前常用的轮式机器人的里程计位姿估计模型进行建立,以及对GNSS差分定位模型和惯导定位模型的建立,同时将机器人系统中的不同定位方式的坐标系统进行转换,在融合之前需要对传感器的原始数据进行处理,GNSS接收机和惯导模块对原始数据中不可靠的部分和误差较大的数据利用融合算法进行剔除,提高原始定位信息质量。
(2)结合线性的卡尔曼滤波,设计并利用扩展卡尔曼滤波器将松组合状态下的传感器信息进行融合,在系统的噪声较小时,卡尔曼滤波算法融合状态较为稳定,但是当系统的误差较大时,融合后的定位精度并不高,而扩展卡尔曼滤波的鲁棒性较强,本文利用扩展卡尔曼滤波对多传感器进行融合,利用不同的组合方式将多传感器的数据进行融合。
参考文献(略)