本文是一篇电气自动化论文,本文首先分别分析了S700K转辙机在健康状态、亚健康状态、故障状态和严重故障状态下的典型功率曲线所表现的特性。然后,结合VMD算法和改进多尺度排列熵对典型功率曲线进行特征表征,并经KPCA处理后实现信号特征精简和建立状态特征集。最后,基于变量支持向量机算法和模糊聚类分析算法,分别提出了故障诊断方法和状态评估方法,两种方法呈现递进关系,且通过现场实例进行验证分析,结果证明了本文所提方法的有效性。
1 绪论
1.1 论文研究背景及意义
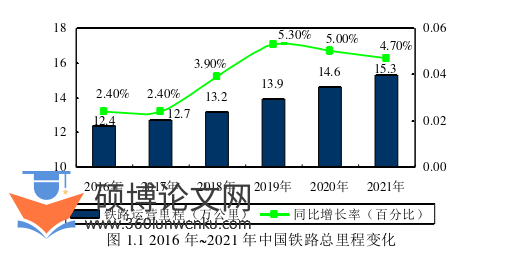
随着铁路大发展时代的到来,铁路出行不仅成为国民出行的首选,而且在物流亨通中发挥着重要作用[1]。据统计,截止2021年我国铁路网运输总里程已达15万公里,其中电气化高速铁路占比在30%以上,成为我国经济持续发展的重要保障[2]。近几年,我国铁路运营总里程的变化如图1.1所示,自2016年到2021年铁路运营总里程稳步发展,继续保持着扩大铁路网规模的发展势头[3,4]。
电气自动化论文怎么写
在运营里程、密度和速度增加的同时,对我国铁路网电气化、信息化和智能化方面提出更高的要求。电气化铁路中的三大设备包括“轨道”、“信号机”和“转辙机”,而由于“转辙机”引起的故障率占40%以上[5,6]。为实现列车安全运行,现阶段,铁路部门主要采用计划检修(以日计划、周计划和月计划来定期检修)、故障维修(故障发生后,以现场维修人员进行抢修)两种方案来保证转辙机正常运行[7,8]。针对以上检修方式,不可避免地造成劳动力过剩、效率低、安全隐患大等问题。
S700K转辙机作为提速道岔中的关键设备,广泛应用于高速铁路中[9]。在微机监测中心,以采集其动作功率曲线的阀值来设置预警线[10],虽然进一步提高了转辙机故障预警机制,但想要达到对现场故障快速响应的目的,需要对其故障类别和运行状态进行分析[11,12]。S700K转辙机不同于以往6线制和4线制的道岔,其主要应用于5线制道岔,并以三相异步电动机作为驱动动力,利用滚动丝杠完成动力传送[13]。以S700K转辙机机械传动结构入手,分析在动力传动过程中能够反映其状态的特征量,并将状态特征量作为分析指标,结合评估算法建立S700K转辙机运行状态评估模型对铁路智能化提升、保证铁路行车安全和提高检修效率有着重要意义[14-17]。
..................................
1.2 国内外研究及发展现状
1.2.1 S700K转辙机的状态信息监测
S700K转辙机动作过程由机械室内的控制电路和转辙机自身驱动电路共同完成[23],其运行状态致因元素分析是进行状态评估的第一步。目前转辙机的状态监测方式和类型众多[24],为应对S700K转辙机在结构和运行环境的特殊性,需要对能够体现其运行状态的信息监测对象进行分析。在转辙机状态监测过程中,根据采集的信息对象的不同,失效模型可以分为:动作电流失效模型[25,26]、动作电压失效模型[27]、功率失效模型[28,29]、动作力矩失效模型[30],缺口检测失效模型[31,32]。在采集的状态信息中,前两种是基于机械室内的TJWX-2006信号集中监测中心对转辙机动作过程进行信息采集,而后三种需要配合室外的传感设备获取数据,但其状态信息都不能直接去判定转辙机故障状态,需配合后续的信息分析与处理。
对于转辙机动作电流作为状态监测信息方面,程伟鸷等人利用ZD6转辙机动作过程中,其直流电动机输入电流的变化判定转辙机处于的故障状态[33,34]。ZD6转辙机采用的6线制道岔,利用信号机械室内的监测设备直接实时监控[35],在一定程度对转辙机的状态预警和人工维修策略有意义。S700K转辙机的动力来源是三相异步电机[36],并采用5线制道岔,当转辙机动作电流作为状态信息时,由于继电器的缓放功能,其中两相电流在持续一段小电流后才逐渐为零,而另外一相电流在道岔到位后,直接降为零[37]。S700K转辙机的三相动作电流之间并不具有一致性,以传统动作电流作为状态采集信息时,增加了信号处理的复杂度,而且很难综合考虑故障机理[38]。
.......................
2 S700K转辙机理论分析
2.1 S700K转辙机结构分析
S700K转辙机是全自动电气化的机械设备,在铁路道岔中实现铁路换轨离不开内部复杂结构之间的配合[80]。S700K转辙机内部机械结构主要可分为:外壳、安全装置、检测和锁闭装置、动力传动机构[81],其内部详细结构示意图如图2.1所示。
(1) 外壳
S700K转辙机的外壳起到保护作用,底壳和机盖保护整个设备,动作杆套筒、导向套筒及导向法兰是保护转辙机动作过程不受外界作用力的干扰
(2) 安全装置
S700K转辙机的安全装置是防止内部误动作的机构,其中包括了开关锁、遮断开关、连杆和摇把孔挡板。
(3) 检测和锁闭装置
检测和锁闭装置的作用是检查道岔是否转到位,并且启动自锁装置,防止由于外界作用力而造成脱落。检测杆是检测装置,叉型接头、速动开关组、锁闭块锁舌是自锁装置,缺口指示灯用于表示是否转动到位。
(4) 动力传动机构
动力传动机构作为S700K转辙机的核心部分,其作用是带动尖轨运动的动力单元。三相异步电动机提供动力,经齿轮组传动,在摩擦联接器减速和保护后,由滚动丝杠带动尖轨运动,随后保持联接器用于转辙机的防挤脱装置。
..................................
2.2 S700K转辙机动作机理
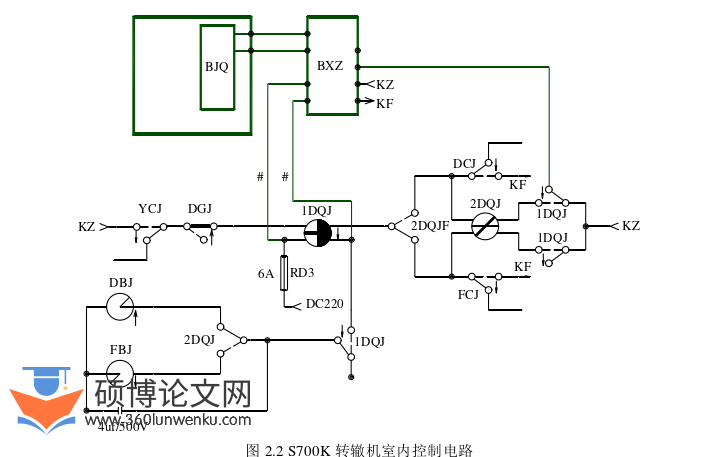
S700K转辙机动作机理是由控制电路和动作电路组成,其中室内控制电路的原理图如图2.2所示。
电气自动化论文参考
以转辙机从反位动作到定位为例,其室内控制电路的可以分为以下步骤[82]:
(1) 首先YCJ吸起,DGJ在轨道没有“占用”以后为常吸起状态。
(2) 然后DCJ吸起,直流电源KZ经1DQJ和2DQJ后转辙机开始动作,同时断开表示电路。
(3) 最后转辙机动作到位后,2DQJF动作,从而1DQJ断电,同时接通定位表示继电器DBJ。
.............................
3 基于VMD排列熵的状态特征提取 ................................. 14
3.1 状态特征提取流程 ................................ 14
3.2 算法分析 ................................... 15
4 基于多变量支持向量机的故障诊断 ............................... 28
4.1 算法分析及故障诊断流程 ................................ 28
4.1.1 多变量支持向量机算法 ............................... 28
4.1.2 故障诊断流程 ................................ 30
5 基于模糊聚类分析算法的状态评估 ........................ 34
5.1 算法分析及状态评估流程 ........................................... 34
5.1.1 模糊聚类分析算法 .................................. 34
5.1.2 状态评估流程 ........................................... 35
5 基于模糊聚类分析算法的状态评估
5.1 算法分析及状态评估流程
5.1.1 模糊聚类分析算法
对于S700K转辙机在全周期内对其状态进行评估时,考虑本身故障数据量的不足,本章提出基于模糊聚类分析的状态评估算法。首先实现对功率曲线标准集预分类处理,通过章节2.3对功率曲线的分析,建立S700K转辙机在健康、亚健康、故障和严重故障4种不同运行状态下的典型曲线标准集;然后结合VMD算法和多尺度排列熵算法进行频域状态特征提取,建立不同状态下的状态特征向量;最后利用模糊聚类分析算法形成动态聚类图,并对测试集的运行状态进行评估。
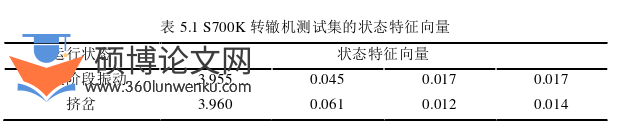
为验证本章所提的基于模糊聚类分析算法在S700K转辙机运行状态评估中的有效性,本节通过现场信号集中监测中心进行功率曲线的提取,并以此进行实例验证。结合现场实际检修结果,在历史曲线数据中随机选取关于S700K转辙机在亚健康状态下的“转换阶段振动”和在严重故障下的“挤岔”各1组动作功率曲线作为测试集。测试集中的功率曲线在特征分析后,分别定义其状态特征向量的标签依次为1[d]、2[d],且测试集中的功率曲线如图5.2所示,状态特征向量如表5.1所示。
电气自动化论文参考
..............................
结论
在铁路系统信号设备中,转辙机作为铁路线路转换的关键机电一体化设备,其稳定、安全、有效的运行不仅成为国内外研究者的热点问题,而且关乎国家对高速化铁路大发展的硬性要求。S700K转辙机不同于其他机电设备,其转换动作分别由机械室的控制电路和站场内的动作电路配合完成。针对S700K转辙机的转换过程,通过分析动作机理,得出其动作功率曲线特征与其运行状态的机械性能之间具有一致性。本文首先分别分析了S700K转辙机在健康状态、亚健康状态、故障状态和严重故障状态下的典型功率曲线所表现的特性。然后,结合VMD算法和改进多尺度排列熵对典型功率曲线进行特征表征,并经KPCA处理后实现信号特征精简和建立状态特征集。最后,基于变量支持向量机算法和模糊聚类分析算法,分别提出了故障诊断方法和状态评估方法,两种方法呈现递进关系,且通过现场实例进行验证分析,结果证明了本文所提方法的有效性。
本文主要研究结论如下:
(1) 为研究S700K转辙机的运行状态,考虑到其在不同状态下功率曲线呈现的不同特性,选用S700K转辙机的功率曲线作为状态信息。通过分析S700K转辙机结构机理,得出其动作功率曲线不仅与转辙机的转换力矩具有一致性,而且在不受外界环境的干扰就可通过TJWX-2006信号微机监测系统获取。
(2) 在状态特征表征中,利用VMD算法在处理非线性、时序性信号序列的优势,对S700K转辙机功率曲线进行频域分解以获取更多的细节分量。为表征不同分量的有效特征,引用改进多尺度排列熵算法对不同分解分量的信号复杂度进行计算。将时域、频域分析相结合虽能够体现转辙机状态之间的差异性,但存在一定信号冗余、特征相关性差等方面的问题,因此引用KPCA理论对特征数据集进行筛选和降维处理。最后建立了S700K转辙机在不同状态下典型功率曲线的状态特征向量,提高了后续故障诊断和状态评估的识别率。
(3) 在S700K转辙机故障诊断中,利用多变量支持向量机对处理小样本数据集的优势,分别对比在VMD-MPE-MSVM和VMD-IMPE-MSVM两种算法下S700K转辙机的故障识别率,证明了改进多尺度排列熵在提取状态特征向量中的有效性。在基于VMD-IMPE-MSVM算法进行故障诊断时,受限于训练样本量的大小,其诊断率成呈现不稳定现象,因此其在故障识别中有一定局限性。
参考文献(略)