本文是一篇电气自动化论文,本文研究了一种改进模型,它结合了两种经典模型 A、B 的优点。首先在改进模型和经典模型 A 下,使用 ACO 对比辨识了电机参数,发现改进模型的辨识精度要高于经典模型 A,从而证明改进模型的建立是必要的。然后在改进模型下,使用 ACO、PSO 和 GA 对比辨识了电机参数,发现 ACO 的辨识精度要高于PSO 和 GA。
1 绪论
1.1 引言
高能耗的工业所造成的环境污染问题日渐严峻,如何解决好能源、环境二者间的矛盾问题,势必将成为全球经济可持续发展的重中之重[1]。电力类能源为达成“提高单位能耗下的生产总值”这一目标,电力传动是一个非常有利的途径。在电力传动领域中,作为最常用的一种设备,电动机拖动生产而消耗的电量约占全国总用电量的 60%[2][3]。
选择电动机时,一方面综合考量其类型和额定容量,从而确保设备的功率因数[4]和长期运行的经济性[5];另一方面采用合理高效的控制策略和方法,从而明显地提升电机运行效率和稳定性。在种类繁多的交直流电机中,感应电机因其制造容易,成本低廉,结构简单,质量轻巧,使用方便,可靠性高,维护快捷等优点,成为了电机领域中应用范围最广、需求量和交易量最大的一种[6]。
在电力拖动领域中,交流变频调速占据着举足轻重的地位,其能够明显地提高控制性能,也达到理想的节能效果,因此被广泛地应用于各种工业生产领域。现如今,为了获得更理想的控制性能与节能效果,全面研究变频调速技术是非常具有现实意义的。
............................
1.2 参数辨识的背景和意义
感应电机虽然大规模地应用于现代工业中。但有些问题尚未很好地解决,例如起动时的电流大、电磁转矩小、数学模型繁杂等,因此在电力电子技术尚未成熟时,电机的调速控制效果并不太理想,转速控制也相对难以实现。由于直流电机操控简便,过负载能力强,具备优良的调速特性。因此在传动系统中始终占据一席之地。然而电机结构复杂,维护工作变得繁琐,在恶劣的条件下不宜使用;同时它必须安装换向器,从而提高了使用成本[7]。交流电机的不足之处一直激发学者们完善控制方法。
1971 年,Blaschke F 提出了一种全新方法——矢量控制(Vector Control, VC)[8]。此法对感应电机的控制造成了深远影响,使其在很多应用领域逐步替代直流电机成为现实。通过空间矢量变换改善了感应电机的动态和静态特性。1985 年,Depenbrock M 研究出一种新方法——直接转矩控制(Direct Torque Control, DTC)[9]。此法直接控制定子磁链与电磁转矩,进行定子磁链定向,将转矩当作被控量。DTC 无需繁琐的旋转变换,计算量少,模型简洁,成功率高,优势较为突出,但它在低速段时的性能不是很理想。
通用变频器没有针对性,难以精确获得电机参数。然而在 VC 中,定子解耦计算和转子磁链估算,均需用到电机参数,磁链估算是 VC 的核心,精度往往会受到电机参数波动的影响。电机的转子参数经常发生大幅变化,和转子电阻相关联的转子时间常数变化幅度甚至可以达到-25%~50%。此时,若控制器仍然按照固定的参数调控,数学模型就不能正确反映电机的工作状态。由此必须要求高精度的转子参数。
电机参数调节不当会降低单位电流形成的电磁转矩,使转矩失去线性,造成磁链定向不准确,还会影响交直轴电流的解耦效果,导致控制系统性能大为降低,这样即使采取 VC 也收效甚微。如果采用无速度传感器的 VC 技术,那么必须利用某些数学算法来估算转速,这些算法无一例外地会用到电机参数值[10],并且电机的控制效果也完全依赖于参数的精确性。此外,参数辨识最大程度优化了电机的工作性能,增强了电机的使用效率,无论在电机的故障分析还是节能方面,都具有深入探索的价值。
.............................
2 感应电机模型及矢量控制原理
2.1 感应电机数学模型
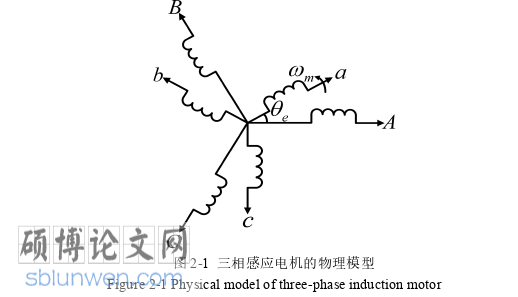
感应电机的三相绕组联结方式分为 Y 型联结和 型联结,无特殊说明,全文都按照 Y 型联结讨论。若三相绕组为 型联结,可先通过 -Y 型变换,等效成Y 型联结,再以此形式完成分析与计算。三相感应电机的物理模型如图 2-1 所示:
电气自动化论文怎么写
图 2-1 中,三相转子绕组 a-b-c 的机械角速度为m ,转子电角位移e 描述了轴线 A、a 间的角度。电压、电流、磁链的正方向都与惯例相同,且均符合右手螺旋法则。
...........................
2.2 矢量控制原理
2.2.1 转子磁链观测
磁链观测方法包括直接测量法和间接测量法。直接测量法可将霍尔元件贴附在定子内表面上,也可将探测线圈埋伏在电机槽中。此方法在多数情况下比较精确,但也存在着工艺技术复杂、机械鲁棒性较低的缺点,还会因为齿槽效应而导致检测的信号波形产生明显脉动。因此在 VC 领域,更多地使用间接测量法进行磁链观测。所谓的间接测量,即使用易于测量的信号估算磁链[49]。按照使用的测量信号不同,通常划分出两类模型法——电压模型法、电流模型法。
电流模型法的优点:测量出的转速、电流,在低速和高速时均可使用,但极易受到电机参数变化的影响,譬如频率变化、电机温升对转子电阻产生的影响,磁饱和度对电感产生的影响。电流模型法的缺点:电机参数的变化会造成转子磁链矢量估测的失真,从而使系统对磁链的控制效果变差。
使用感应电机的数学模型设计控制系统时,必须获得一些电机参数。这些参数大多没有出现在电机铭牌上,只能通过测定实验来获取。传统的参数测定实验包括空载实验和短路实验。研究者提出了众多方法辨识感应电机参数,总体包括离线辨识、在线辨识和以离线辨识结果为依据的在线自调整[51][52][53]。较常用的方法是:先在离线状态下测取电机的全部参数,确保调速系统可以稳定地起动并运行,在电机运行过程中,应用在线智能辨识算法,在线调整转子时间常数rT[54]。本章仅研究了电机的离线参数辨识方法。
................................
3 感应电机参数的离线辨识...............................21
3.1 引言.......................................21
3.2 离线辨识的传统方法.......................................21
3.3 离线辨识的改进方法.................................24
4 感应电机参数的在线智能辨识................................36
4.1 引言..........................................36
4.2 感应电机的改进模型.....................................36
4.3 蚁群算法...................................38
5 参数辨识在变频调速系统的应用...............................58
5.1 系统设计方案.............................58
5.2 系统硬件设计.........................................59
5.3 系统软件设计........................................63
5 参数辨识在变频调速系统的应用
5.1 系统设计方案
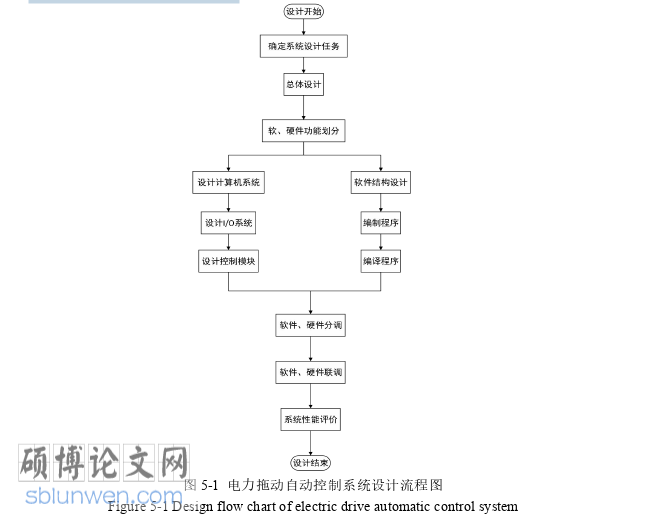
设计变频调速系统时,须经历如下步骤:(1)设计系统的整体控制方案:从系统功能的角度出发,确立一套控制方案;(2)设计主电路:选择电力电子变流装置、电阻器、电容器、断路器等器件的型号,确定电路的拓扑结构图;(3)选择信号检测元件、信号采集元件、传感器的型号;(4)以电机数学模型为依据,设计一套控制算法;(5)设计系统控制电路和辅助电路:选择处理器的型号,使之与外围设备接口相匹配,设计电平转换电路、驱动电路和保护电路;(6)设计系统软件:编写系统初始化程序、主程序、中断服务子程序,并进行调试;(7)先进行单个系统的软、硬件调试工作,再进行多个系统的联调联试工作[75]。系统设计流程如图 5-1 所示:
电气自动化论文参考
变频调速实验平台主要包括:
1.主电路:由含有智能功率模块(Intelligent Power Module, IPM)的逆变电路、泵升电压控制电路、三相桥式整流器等组成。2.控制电路和驱动电路:由以 DSPIC33FJ256MC710 芯片为控制核心的 DSP系统、控制电源、驱动电路等组成。3.检测电路:可检测直流母线电压、电机转速等。4.计算机:基于 Microchip MPLAB C30 工具栏组件编写源程序,调试程序后通过数据线载入 DSP 芯片中,实现和下位机间的通信,完成采集数据、显示状态等操作。
..............................
6 总结与展望
6.1 总结
本文研究对象是感应电机运行中变化的参数,将参数辨识问题与其在变频调速系统中的应用相结合而展开研究,研究工作的完成情况总结如下:
(1)分析了影响电机参数变化的主要原因,由此说明了高性能的变频调速系统离不开参数辨识模块。对比了已有的多种参数辨识方法,回顾了变频调速系统的发展历程,总结了其研究现状。
(2)分析了空载实验和短路实验的测试方法,论述了传统方法存在严苛的实验条件、严格的设备要求以及繁琐的数据采集过程等问题。为了降低变频器参数的自学习难度同时改善起动转矩,本文运用了一种改进的离线参数辨识方法。
(3)利用直流实验、单相实验和空载实验获得了定子电阻sR 、转子电阻rR 、定子漏感lsL (转子漏感lrL )及互感mL 。直流实验还可辨识出逆变器的等效死区时间~dT ,为增强死区补偿的效果提供了数据支撑。
(4)研究了一种改进模型,它结合了两种经典模型 A、B 的优点。首先在改进模型和经典模型 A 下,使用 ACO 对比辨识了电机参数,发现改进模型的辨识精度要高于经典模型 A,从而证明改进模型的建立是必要的。然后在改进模型下,使用 ACO、PSO 和 GA 对比辨识了电机参数,发现 ACO 的辨识精度要高于PSO 和 GA。
(5)在改进模型的基础上进一步研究了变换模型Ⅰ和变换模型Ⅱ。在改进模型、变换模型 I、变换模型 II 下使用 ACO 对比辨识了电机参数。
(6)在变频调速系统中,介绍了主电路、外围控制电路的功能以及硬件电路各部分的器件选型,描述了主程序、中断服务子程序在 DSP 环境下的开发过程。在不同的工况及扰动下,进行了系统性能验证实验,对比了嵌入 ACO 辨识模块前后的磁链、转矩和转速变化情况,证明了精确的参数辨识对于提高变频调速系统性能具有重要意义。
参考文献(略)