第 1 章 引言
1.1 研究目的与意义
点集配准是指将两个及其以上的数据坐标集放入同一个坐标系中,通过相似度评估,使得有相同特征的点集在该坐标系下最大程度叠加,在优化算法中则表现为令坐标叠加误差最小化的处理过程[1]。通常点集配准可根据点集在结构上的形变形式不同分为刚性点集配准和非刚性点集配准,分别为源点集与发生刚性变换(平移,旋转等)或非刚性变换(点集轮廓结构扭曲)的目标点集配准的过程。在刚性点集配准中[2],目标点集原有的数量和轮廓没有改变,仅进行简单的旋转,平移等变换;在非刚性点集配准中[3],目标点集原有的数量或轮廓发生了改变,如点集的扭曲,缩放,缺失等。在对点集配准问题的建模中,刚性点集配准的空间变换函数的逼近形式比较于高自由度的非刚性配准而言较为单一,由于在现实生活中待配准的点集(如描述生物肌肉运动的特征点集)常常在数量和轮廓上都变换较多,所以非刚性点集配准是点集配准中关注的热点问题。通常针对点集的非刚性变换的建模方法分为两种:①使用函数来逼近点集的真实变换状态(如形变,缺失),用数学的方法来可视化点集的运动过程,同时得到最小的坐标叠加误差,常用的逼近函数如薄板样条函数(Thin PlateSplines Function)[4],径向基函数(Radial Basis Function)[5];②使用物理学中的力学模型来对点集的非刚性变换进行建模[6]。在使用函数逼近的建模方法中,现有的非刚性点集配准研究方向则又分为①不基于迭代的配准方法[7],使用某些特定特征对点集进行一次性的对应关系评估,通过最小化两个点集间的拓扑结构或者近似分布间的差异,来获得有对应关系的点对集合;②基于迭代的配准方法[8],通过对给定的两个点集来迭代进行对应关系评估和空间变换函数的更新两个步骤来逐步推测出两个点集中有对应关系的点对,使用优化方法来获得目标方程最优解,求解出使得两个点集在空间中最大化重叠的空间变换函数。本文主要关注基于迭代的点集配准方法研究。
....................
1.2 国内外研究动态
对应关系评估、概率模型构建和目标函数优化是当前该领域的三个热点问题。我们首先从以上三个方面对相关工作进行了叙述。
(1)在对应关系评估中,点集间的对应关系分为二值对应和模糊对应:
①二值对应方法:迭代最近点(Iterative Closest Point,ICP)[24]算法是典型的二值对应关系评估方法之一,具体算法表述为:在获得最小二乘的空间变换函数条件下,通过迭代的方法来找到距离间隔最近点对,计算出能够达到最优匹配的参数,使得能量方程达到最大解。ICP只需要两个点集的距离足够小即认为两个点具有对应关系。这种二值对应二值对应在评估过程中容易陷入局部最优解之中,往往会造成一对多或多对一的错误对应评估问题;
②单决策的模糊对应方法:为了克服二值对应的局限性,此后的点集对应关系评估采用了概率的方法来对点间的对应可能性进行排序,得到更准确的评估结果。相比于二值对应关系评估方法[24],模糊的对应关系评估方法[8]能够使得配准结果更加精确,因为在二值对应关系评估方法中,源点集和目标点集间的关系是简单的0和1,即对应和不对应,当点对间的对应关系为1时,代表该点对具有相似的空间结构,在后续的空间变换过程中应当被恢复到同一坐标中;当点对间的对应关系为0时,代表该点对的空间结构不同。在二值对应中,源点集和目标点集间的点不存在一对多或者多对多的关系,每一个源点至多能找到一个目标点与之相对应。模糊的对应关系评估方法列举出了源点集和目标点集中每两个点间的对应概率。鲁棒点匹配(Thin Plate Splines-Robust Point Matching,TPS-RPM)[25]算法首先提出通过测量特征距离建立模糊对应估计,具体来讲,TPS-RPM通过采用软分配策略先为源点集和目标点集中的任意两对点赋予0到1之间的值,通过迭代求解直至目标方程收敛,最终得到两个点集间的一一对应关系。相干点漂移(Coherent Points Drift,CPD)[8] [25-28]改进了点集间模糊对应关系的评估方法,即采用概率的形式来描述源点集和目标点集间的对应关系,并将这种对应概率存储为概率矩阵,在概率矩阵中,两个点对应的概率值越大,则该点对的对应关系确定性也就越大。此处应注意的是对于每一个源点集中的点,其与目标点集中的每个点间的对应概率相加的和必须等于1。全局-局部对应关系和变换估计 (Global-Local Correspondence and Transformation Estimation,GL-CATE)[26]同时使用了全局特征描述子和局部特征描述子相结合的方法来评估两个点集间的模糊对应关系。在点集配准中往往会存在误配的情况,尤其时当点集规模较大或存在大量离群点的情况下,算法会出现对应关系误评估状况,点集的对应关系估计算法将严重退化。为了减少此种误评估,Ma-L2E(Ma–L2Estimator)[27]使用鲁棒性更好的L2最小化估计(L2 Estimator,L2E)[28]来稳健地执行点集对应关系评估。具体来讲,Ma-L2E通过迭代来恢复点间的一一对应关系,算法首先使用形状上下文等特征描述子来评估点集间对应关系的概率,此时的建立的对应关系集和中包含了很多错误的对应关系,通过使用L2E来迭代更新模型参数,获得鲁棒的对应关系。然而以上基于模糊对应的点集配准方法都只是通过使用基于距离特征的使用单个或多个描述子(混合不同权重)来为每个点建立起单个距离属性,并在之后的迭代配准过程中一直以此单一属性为基准推断源点集和目标点集间的模糊对应关系;
..........................
第 2 章 基于变分贝叶斯框架的非刚性点集配准算法详解
2.1 基于混合模型的点集配准
本小节主要介绍构建有限混合模型的具体步骤和基于有限混合模型对点集进行对应关系评估的方法。在点集配准中,在源点集和目标点集中能够找到正确对应关系的点称为内点,找不到对应关系的点称为离群点。
有限混合模型指多个分布进行线性加权组合所表示的复杂分布,往往包含了大量的变量和隐变量,使得模型更为复杂。有限混合模型除了能为观察和分析数据提供结构更复杂,更精确的概率分布估计之外,也常常被用于数据的聚类问题[65]。
有限混合模型作为一种聚类模型因其具有灵活的可叠加性和严格的数学可推导性被广泛运用于点集配准中,例如算法 CPD[8],GL-CATE[26]和GMM- REG[42]都是基于高斯混合模型来评估点集对应关系,其中 GMMREG 分别为源点集和目标点集建立了两个不同的高斯混合模型,通过最小化两个混合模型间的 L2 距离来获得点集的对应关系。CPD[8]是通过 GMM 来计算源点集和目标点集间的欧氏距离并将这种距离度量转化为点对间的对应概率来判定两个点集间是否具备对应关系,为了进一步处理点集中存在的离群点和噪声问题,在 GMM 的基础上叠加了一个额外的均匀分布来处理噪声。GL-CATE[26]在 CPD 的基础上提出了局部特征描述子和局部特征约束,并将它们分别加入到高斯混合模型和能量方程中,进一步扩展了 GMM 仅通过欧氏距离作为度量两个点集相似性的概率计算方法。
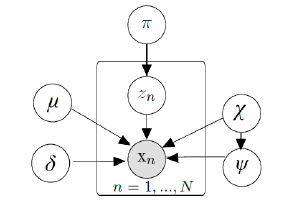
图 2.2 基于变分贝叶斯框架的非刚性点集配准算法的有向图模型
2.2 贝叶斯定理与共轭先验
本小节主要介绍贝叶斯定理,在贝叶斯定理中先验分布的选取,以及指数族分布的共轭性定义,该节是基于贝叶斯定理来估计点集配准模型中未知参数的基础,也为模型中的未知参数选取共轭的先验分布提出一些指导意见。
概率统计是指根据随机重复事件的频率来计算出事件发生的概率,但是往往我们需要定量地描述随机事件发生的可能性和不确定性,如果在现实生活中新的待观测的类似事件发生次数较少,则需要统计者根据少量新的事件信息来对建立的概率模型的不确定性进 修正,对接下来将要发生的事件的不确定性信息作出精确的推理,而贝叶斯概率估计[70]可以很好地解决这个问题,所以贝叶斯概率估计被广泛应用于生活,工业,医学等领域。
在贝叶斯估计中[70],先验分布的选取是一个必不可少的研究话题,在实际应用中,当先验的选择出现偏差时,使用贝叶斯估计往往会给出错误的推论。为了使得简化贝叶斯估计的数学推理,统计学家提出了共轭(conjugate)[71]的概念,即选择与后验概率分布的函数表达形式相同的先验概率分布,其中指数族分布是具有共轭性质的分布族,所以共轭先验函数的选取在很大程度上简化了贝叶斯估计的复杂性。
图 2.1 元素依赖概率图模型。
第 3 章 基于特征点集的图像配准算法........................25
3.1 基于 SIFT 算法的特征点集提取 .......................26
3.2 特征点集对应关系评估 .............................26
第 4 章 HPMR 的非刚性点集配准算法.............................30
4.1 假定内点评估 ....................................31
4.1.1 内点属性和离群点属性 ...........................32
4.1.2 基于对称交互熵的假定内点评估 .......................36
第 5 章 实验设置及结果分析...........................60
5.1 实验数据来源 ...........................60
5.2 算法性能评价标准.........................60
第 5 章 实验设置及结果分析
5.1 实验数据来源
为了充分证明 HPMR 算法的有效性,我们在点集配准和图像配准中分别使用了如下数据集:
(1)合成二维点集:常使用的数据包括鱼、汉字福、手和线,人脸,鱼和轮廓等二维点集;
(2 ) Swagger 数 据 集 ( http://accad.osu.edu/researchmain/research/motioncapture lab/system data.html):由Ohio州立大学针对人体运动姿态(一共包括了518帧人体的Swagger运动姿态)所采集的三维立体数据(包括了XYZ三维坐标);
(3)牛津仿射协变区域数据集(Oxford affine covariant regions dataset),(http://www.robots.ox.ac.uk/vgg/research/affine/);
(4)小型无人机图像配准数据集(small UAV image registration dataset,SUIRD)(https://github.com/yyangynu/SUIRD)[3]:进建立了 50 对小型无人机遥感图像及标记的 groundtruth,这些图像对中包含视角的水平,垂直及混合变化。
.......................
第 6 章 总结与展望
6.1 总结
当前的非刚性点集配准中存在的三个热点问题为:(1)离群点问题会阻碍配准中内点的筛选及对应关系评估;(2)点集对应关系缺失,旋转和形变问题会阻碍源点集和目标点集坐标上的最大化重合;(3)局部最优解问题常常导致算法无法获得最优的更新参数,从而导致点集评估概率模型失效,空间变换函数拟合能力下降。
为了解决以上三个问题,算法 HPMR 首先使用犹豫模糊环境下的 HFEW 算子和对称交互熵来对点集中的假定内点进行评估,获得混合模型中的对应关系评估子组件的数量;其次再基于学生 t 分布建立混合模型来评估点集对应关系和聚合离群点,最后在变分贝叶斯框架下基于先验信息来完成模型参数的更新,获得空间变换函数。 值得注意的是,算法 HPMR 所提出的层次概率模型不同于其他基于混合模型的点集配准算法,其主要区别在于:(1)为源点集和目标点集中同时存在的内点和离群点建立了逻辑合理的假定内点评估步骤来筛选内点;(2)为不确定的点集对应关系建立了完整的基于学生 t 分布混合模型,并使用额外的学生 t 分布混合模型来聚合离群点,从而获得更准确的点集对应关系;(3)HPMR 为每个参数和隐变量都加入了先验分布,用于指导在迭代过程中的每个参数和隐变量的后验概率更新,从而实现学生 t 分布尾部和混合比例的自动更新,从而动态地为离群点和对应关系缺失的点分配更小的混合比例;(4)使用贝叶斯线性回归方法来抵抗点集中的噪声;(5)采用先验自调节的自相关策略来完成刚性与非刚性空间过程的自动切换;(6)为了避免模型参数在求解过程中的局部最优解问题,HPMR 采用了贝叶斯框架来求解目标方程最优解,同时采用了树状平均场因式分解的方法来获得紧致的变分下界,将混合模型和线性回归统一到同一个框架下进行推理统计,避免出现数据塌陷问题。
参考文献(略)