
第 1 章 绪论
1.1 课题研究背景及意义
1.1.1 研究背景
进入 21 世纪以来,云计算(Cloud Computing)、大数据(Big Data)和物联网(Internetof Things)已经成为当下信息时代的热点问题。科技的进步正潜移默化的改变着整个社会的发展方向,也加速着生活质量的提高。物联网为人与自然的信息交互提供了可能性,WSN为这种可能性提供了最好的技术支持[1-2]。它因其重量轻、体积小、设备简单等特点,成为物联网技术中的热点研究问题。WSN 是一种集多种技术于一身的综合网络[3]。通过连接互联网,WSN 可以实现人与自然环境的交互,为人们感知、认识和了解世界提供新的可能,为新时代的智能化发展注入新的动力。它的工作方式是通过随机分布节点收集区域内的监测数据并且发送至终端控制器,对节点发送至设备终端的信息进行处理,提取相关数据,以达到监测该区域的目的[4]。
1.1 课题研究背景及意义
1.1.1 研究背景
进入 21 世纪以来,云计算(Cloud Computing)、大数据(Big Data)和物联网(Internetof Things)已经成为当下信息时代的热点问题。科技的进步正潜移默化的改变着整个社会的发展方向,也加速着生活质量的提高。物联网为人与自然的信息交互提供了可能性,WSN为这种可能性提供了最好的技术支持[1-2]。它因其重量轻、体积小、设备简单等特点,成为物联网技术中的热点研究问题。WSN 是一种集多种技术于一身的综合网络[3]。通过连接互联网,WSN 可以实现人与自然环境的交互,为人们感知、认识和了解世界提供新的可能,为新时代的智能化发展注入新的动力。它的工作方式是通过随机分布节点收集区域内的监测数据并且发送至终端控制器,对节点发送至设备终端的信息进行处理,提取相关数据,以达到监测该区域的目的[4]。
WSN 已经遍布生活的角落,应用也越来越普及,在智能交通控制、工农业观测、环境数据监测等领域随处可见。特别是在一些资源匮乏、条件恶劣或者无法进行人为监测的环境中,它的作用显得尤为明显和重要。在监测区域内,节点在收集信息并且发送至设备终端后,若节点没有附带位置信息,那么收集到的节点数据将无法发挥最大的应用价值,因此首先要确定节点的位置才能提取有价值的信息[5]。传统的方式是为节点配置成本较高的GPS 模块,但考虑到节点在不同的环境中随机布置的实际情况,定位技术的适应能力要足够应付任何复杂环境[6-7]。同时 GPS 的能耗高,成本高也是要考虑的问题。因此更为合理的方案是仅对小比例的节点配备 GPS,其他的待测节点则需要特定的算法确定坐标位置[8]。也正因为如此,节点定位成为需要解决的最根本问题。
.............................
1.2 国内外研究现状
1.2.1 国外研究现状
WSN 雏形的出现最早可以追溯到 70 年代,在经历了漫长的发展和不断完善的过程后,已经在实际应用中取得巨大的成功。
在国外,美国先拔头筹的开始了对节点定位这一关键技术领域的研究[11]。在二十世纪九十年代,美国伯克利大学的 Kinstorfer Pister 教授提出“智能微尘”的理念,这些“微尘”可以在检测区域范围内相互通信并且相互定位位置。2003 年,美国的 Inter 公司发布对 WSN的研究计划,在对其进行扩展优化后将其运用到环境监测中。与此同时,世界上的一些发达国家也紧随其后的开展着对 WSN 定位技术的研究工作。其中,一些知名的大型公司都已经在 WSN 方面取得了出色的成绩和傲人的成果,例如 Philips、Siemens 以及日本的 NEC、OKI 公司等[12]。
节点定位技术是一切实际实践的前提条件,经过国内外学者漫长的摸索和研究过程后,优秀的节点定位算法和定位思想层出不穷。
第 3 章 基于最小均方误差的 DV-Hop 算法设计..................................12.............................
1.2 国内外研究现状
1.2.1 国外研究现状
WSN 雏形的出现最早可以追溯到 70 年代,在经历了漫长的发展和不断完善的过程后,已经在实际应用中取得巨大的成功。
在国外,美国先拔头筹的开始了对节点定位这一关键技术领域的研究[11]。在二十世纪九十年代,美国伯克利大学的 Kinstorfer Pister 教授提出“智能微尘”的理念,这些“微尘”可以在检测区域范围内相互通信并且相互定位位置。2003 年,美国的 Inter 公司发布对 WSN的研究计划,在对其进行扩展优化后将其运用到环境监测中。与此同时,世界上的一些发达国家也紧随其后的开展着对 WSN 定位技术的研究工作。其中,一些知名的大型公司都已经在 WSN 方面取得了出色的成绩和傲人的成果,例如 Philips、Siemens 以及日本的 NEC、OKI 公司等[12]。
节点定位技术是一切实际实践的前提条件,经过国内外学者漫长的摸索和研究过程后,优秀的节点定位算法和定位思想层出不穷。
在 2016 年,Amanpreet Kaur 等在研究分析 DV-Hop 算法的主要误差来源后,通过引入Gauss-Newton 方法对信息数据进一步优化校正,更行之有效的减小算法的定位误差[13]。在2017 年,J. Mass-Sanchez 等提出一种以距离为权重的 DV-Hop 定位算法,然后结合双曲线定位算法提出融合后的混合定位算法,并且以实验数据说明误差的减小程度[14]。MatsnaNuraini Rahman 等提出一种在 WSN 中可以实现多点定位的三边测量法,在多节点实施定位的同时保证定位精确度[15]。在 2018 年,Omar Cheikhrouhou 等选择 RSSI 作为测距手段,以此获取更准确的节点距离。通过 RSSI 值获取的更准确的数据控制误差,在定位精确度方面有明显提高[16]。Songyut Phoemphon 等首先对覆盖范围进行优化,减少了定位过程中对信标节点数量的需求量。然后通过 PSO 搜索算法将跳数和信标节点数合并至适应度函数中,精确定位误差[17]。
..............................
第 2 章 无线传感网与常见的定位算法
2.1 无线传感网络概述
2.1.1 无线传感网络简介
物联网技术正在悄无声息的提供着更为方便快捷的获取信息的途径,而无线传感网络(WSN)正是让这种途径成为可能的主要媒介。它通过分布节点获取监测范围内的数据信息。硬件配置不同的节点会有不同的任务分工,经过协作完成最终的监测任务。普通节点感知到信息后,将这些数据信息通过自组织网络传递给汇聚节点,汇聚节点将数据整理后通过数据传输媒介传递给终端设备,提取有价值的数据信息[25-26]。图 2.1 为 WSN 的核心架构图。
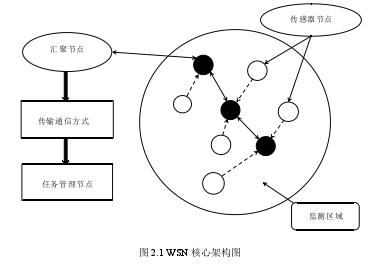
节点虽然体积较小但具有相对独立的系统,它包含着各种功能模块[25]。节点除去需要完成对数据的感知工作外,还要完成对数据的整理和传输工作。但由于传感器节点自身所携带的电量较小,因此节点无法负载高负荷、计算量过大的高能耗开销。
.................................
2.2 常见的节点定位算法介绍
2.2.1 基于非测距的节点定位算法
顾名思义,节点定位是为节点确定其坐标位置的技术手段。在监测任务前,在区域内布置部分已知位置的节点,在监测过程中,已知位置的节点通过洪泛方式将自身所携带的信息传递给待测节点,包括节点的坐标位置、ID 序号以及跳数等[28]。以最小跳数信息为依据获取节点间的单跳跳距,以此确定节点间距离,通过位置计算公式求得待测节点的坐标位置。图 2.3 为节点的分布图。
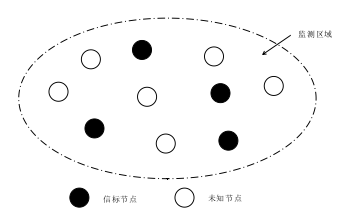
在定位的数据准备阶段,在获取距离这一关键数据时,依据获取手段的差异可以粗略的将算法区分为基于 Ranging 和 Range-free 的两个类别[29]。基于 Range-free 的算法不需要借助其他的额外手段,优势在于能耗低且易实现。也正因为如此,该类算法的定位精确度较低。以下是常见的基于 Range-free 的定位算法。
.............................
第 2 章 无线传感网与常见的定位算法
2.1 无线传感网络概述
2.1.1 无线传感网络简介
物联网技术正在悄无声息的提供着更为方便快捷的获取信息的途径,而无线传感网络(WSN)正是让这种途径成为可能的主要媒介。它通过分布节点获取监测范围内的数据信息。硬件配置不同的节点会有不同的任务分工,经过协作完成最终的监测任务。普通节点感知到信息后,将这些数据信息通过自组织网络传递给汇聚节点,汇聚节点将数据整理后通过数据传输媒介传递给终端设备,提取有价值的数据信息[25-26]。图 2.1 为 WSN 的核心架构图。
节点虽然体积较小但具有相对独立的系统,它包含着各种功能模块[25]。节点除去需要完成对数据的感知工作外,还要完成对数据的整理和传输工作。但由于传感器节点自身所携带的电量较小,因此节点无法负载高负荷、计算量过大的高能耗开销。
.................................
2.2 常见的节点定位算法介绍
2.2.1 基于非测距的节点定位算法
顾名思义,节点定位是为节点确定其坐标位置的技术手段。在监测任务前,在区域内布置部分已知位置的节点,在监测过程中,已知位置的节点通过洪泛方式将自身所携带的信息传递给待测节点,包括节点的坐标位置、ID 序号以及跳数等[28]。以最小跳数信息为依据获取节点间的单跳跳距,以此确定节点间距离,通过位置计算公式求得待测节点的坐标位置。图 2.3 为节点的分布图。
在定位的数据准备阶段,在获取距离这一关键数据时,依据获取手段的差异可以粗略的将算法区分为基于 Ranging 和 Range-free 的两个类别[29]。基于 Range-free 的算法不需要借助其他的额外手段,优势在于能耗低且易实现。也正因为如此,该类算法的定位精确度较低。以下是常见的基于 Range-free 的定位算法。
.............................
3.1 背景介绍....................................... 12
3.2 DV-Hop 算法简介...........................................12
3.3 DV-Hop 算法性能分析....................................14
第 4 章 基于布谷鸟搜索技术的定位算法设计.......................................... 30
4.1 背景介绍...................................... 30
4.2 布谷鸟算法简介....................................... 30
4.3 布谷鸟算法性能分析....................................... 32
第 5 章 总结与展望................................. 42
5.1 论文总结.................................. 42
5.2 工作展望...................................... 43
第 4 章 基于布谷鸟搜索技术的定位算法设计
4.1 背景介绍
物联网(IoT)技术的普及在将生活质量推向更高层面的同时,也在实践中不断发现着仍需解决的问题。节点定位是 WSN 应用于实践操作的基础条件,同时也是需要不断完善和改进的重难点问题。是真正实现 WSN 应用最大化的核心技术[41]。因此,如何获取到更接近实际的位置信息就成为了备受关注的热门问题。相比之下,DV-Hop 算法因为实现过程简单,而且可以对其进行扩展优化,成为算法中关注热度最高的算法之一。但也正因为如此,定位误差会有较大程度的偏差。
4.1 背景介绍
物联网(IoT)技术的普及在将生活质量推向更高层面的同时,也在实践中不断发现着仍需解决的问题。节点定位是 WSN 应用于实践操作的基础条件,同时也是需要不断完善和改进的重难点问题。是真正实现 WSN 应用最大化的核心技术[41]。因此,如何获取到更接近实际的位置信息就成为了备受关注的热门问题。相比之下,DV-Hop 算法因为实现过程简单,而且可以对其进行扩展优化,成为算法中关注热度最高的算法之一。但也正因为如此,定位误差会有较大程度的偏差。
布谷鸟算法(Cuckoo Search Algorithm)是依据生物习性而设计出的智能搜索算法[42-43]。该算法的实现需要的参数更少,并且不需要复杂的过程。同时 CS 算法可以在全局和局部搜索方面达到更优良的平衡,为设计性能优良的算法开辟了新的途径。
CS 算法已经在生活的多个方面体现它的价值。针对 MMSDV-Hop 算法定位过程中的坐标估计阶段,考虑引入智能搜索算法来获取更准确的坐标位置。据此,设计以减小误差为目标的解决方案,即 CSTMDV-Hop 定位算法。在求解坐标位置的阶段,引入 CS 算法代替位置计算方法,避免在此阶段误差累积带来的不确定性影响。通过这一关键的步骤,可以将问题转换为在区域内寻找更优质解的搜索任务。并通过自适应调整步长因子? 和发现概率aP ,在具备高效的收敛性和寻优精度的同时,尽可能的使全局和局部搜索达到最优的状态。目标是减小算法的定位误差。
..............................
第 5 章 总结与展望
5.1 论文总结
本文以无线传感网中的节点定位算法为主要研究内容。研究工作的重点选择较为热门的 DV-Hop 算法。以减小误差为目标设计解决方案。具体的工作如下:
CS 算法已经在生活的多个方面体现它的价值。针对 MMSDV-Hop 算法定位过程中的坐标估计阶段,考虑引入智能搜索算法来获取更准确的坐标位置。据此,设计以减小误差为目标的解决方案,即 CSTMDV-Hop 定位算法。在求解坐标位置的阶段,引入 CS 算法代替位置计算方法,避免在此阶段误差累积带来的不确定性影响。通过这一关键的步骤,可以将问题转换为在区域内寻找更优质解的搜索任务。并通过自适应调整步长因子? 和发现概率aP ,在具备高效的收敛性和寻优精度的同时,尽可能的使全局和局部搜索达到最优的状态。目标是减小算法的定位误差。
..............................
第 5 章 总结与展望
5.1 论文总结
本文以无线传感网中的节点定位算法为主要研究内容。研究工作的重点选择较为热门的 DV-Hop 算法。以减小误差为目标设计解决方案。具体的工作如下:
(1)关于节点定位的绪论部分。对其国外的研究情况以及国内的发展状况进行了简单的介绍,通过几种优化改良后的定位算法展示当前阶段的研究热点。其次是有关课题研究的重要实际意义,其中如何减小误差一直是该课题的焦点问题。分别对基于 Ranging 和Range-free 这两个类别的算法做了具体的介绍。另外简单介绍几种位置计算方法。在分析对比几种 Range-free 算法的优缺点后,选择 DV-Hop 算法作为研究工作的重点,针对该算法设计优化解决方案。本文的工作重点在于如何降低误差,获取更接近实际的坐标位置,提高定位精确度。
(2)设计基于最小均方误差的 DV-Hop 算法。首先对 DV-Hop 算法的步骤做了详细的介绍。发现单跳跳距和估算坐标位置两个阶段是产生误差的主要来源。在获取单跳跳距这一关键数据时,未知节点一般会就近的选择单跳跳距作为自己的单跳跳距。基于对误差的分析后,通过最小均方误差准则求解信标节点的单跳跳距,并以单跳误差校正该单跳跳距。引入以跳数和单跳误差为权重的加权方法权衡多个单跳跳距后确定未知节点的单跳跳距。同时,在估算坐标位置阶段,选择最小二乘法位置计算方法,并且通过引入以跳数误差和距离为权重的加权方法减小定位误差,提高定位精确度。基于此设计一种基于最小均方误差的 DV-Hop 算法,即 MMSDV-Hop 算法。文中对其核心思想以及工作流程做了具体介绍。在经过理论层面的分析以及对误差结果的分析对比后发现,MMSDV-Hop 算法可以有效的降低误差。
参考文献(略)