第 1 章 绪论
1.1 研究背景与意义
随着我国城市化进程的加速推进和经济的迅猛发展,我国的机动车数量呈现急剧增长的趋势。据公安部统计,仅 2017 年在公安交管部门新注册登记的机动车数量就为 3352 万辆,截止 2017 年底,我国机动车保有量已经达到了惊人的3.1 亿辆。全国 53 个城市机动车保有量达到 100 万辆,24 个城市超过 200 万辆,包括北京、成都、重庆、上海、苏州、深圳和郑州在内的 7 个城市机动车保有量超过了 300 万辆[3]。机动车数量的爆炸性增长导致了交通拥堵加剧,造成交通安全和环境污染等问题。因此,找到一种合理有效的方法来解决交通拥堵问题已经迫在眉睫。
目前通常有两种途径来解决交通拥堵问题:一是通过基础设施建设,加快建设路网来应对机动车增长带来的交通压力,但该方法存在局限性,一些城市的路网形态很难改变与再建设,且通常该方法需要大量资金与空间,因此该方法易受到条件的约束;二是在采用计算机数据处理技术的基础上,利用传感器将道路和车辆连接起来构成交通传感网络,即智能交通系统(Intelligent TransportationSystem, ITS )。它能在现有技术的基础上对交通信息进行实时诱导与控制,最大限度的发挥交通运输系统的运输和管理效率。而实时诱导是通过对交通信息的预测来提前了解道路交通状况实现的,因此准确的智能交通流预测是目前的研究热点。
较强的时间相关性、高度的非线性以及不确定性是城市交叉路口交通流的主要特征,这些特征使得包括历史数据法、时间序列法和模型法在内的传统交通流预测方法已经不能取得令人满意的效果。因此,城市交叉路口的交通流预测成为智能交通系统研究的主要领域,且 ITS 主要研究的是短时交通流量预测,即预测的时间间隔不超过 15 分钟[4]。ITS 与短时交通流量预测结合的意义主要有:
(1)提前预测交叉路口流量并结合智能交通诱导系统实现对交通的诱导;
(2)动态控制交通信号,结合信号控制系统提高交叉路口通行能力,降低交通延误[5][6];
(3)规划合理的车辆行程线路,预测行程时间。
综上所述,针对交叉路口的短时交通流量预测具有重要的实践意义,并且城市关联交叉路口之间的交通流特性由于其相近的地理位置一定存在一定的联系和相似性,根据其联系即可通过已知观测点预测相连的节点流量,这对于相连交叉路口的信号配时、流量分配以及提高道路利用效率有重要作用。本文以海信网络科技公司“交通智能管控平台”交通诱导模块的预研课题为背景,主要针对城市关联交叉路口进行研究。
..........................
1.2 交通流预测研究现状
车辆诱导和交通控制的实现是要有准确的、实时的交通流预测作为支撑,因此伴随着 ITS 的快速发展,短时交通流量预测成为国内外学者普遍关注的重点领域,也产生了很多优秀的模型及算法,推动了交通流预测领域的发展。本节将主要论述国内外交通流预测模型及相关的智能优化算法的研究现状。
1.2.1 交通流量主要预测模型
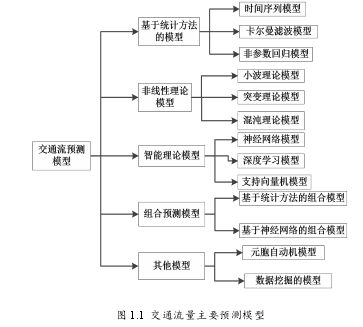
自上世纪六七十年代起,全球各领域各学科的科研人员和学者就开始利用各自领域的方法尝试对短时交通流量进行预测,创造出了很多优秀的预测模型,如图 1.1 所示,主要有基于统计方法的模型、非线性理论模型、智能理论模型、组合预测模型以及其他模型这五大类[7]。这些优秀的算法虽然或多或少的存在着局限性,应用场景和应用范围也不尽相同,但无一例外的都推动了交通流预测领域的发展。
.................................
第 2 章 短时交通流预测相关理论
2.1 短时交通流量预测概念
交通流量是描述交通流特性最重要的参数之一,又称交通量,是指在单位时间内通过道路某一车道、某一地点或某一断面的实际车辆数[41]。
交通流量预测是指在已知交通数据的基础上,采用某种技术手段找出历史数据间的内在规律,通过其规律计算出目标数据,进而达到预测未来交通数据的目的。在交通流量预测中,除了根据预测间隔(一般为 15min)分为短时、长期交通流预测外,还可根据预测的目的和用途以及采集的流量数据不同分为很多种类:根据不同的预测对象可以分为道路路段流量预测和道路交叉口流量预测;根据不同的预测用途可以分为以诱导交通为目的的预测和以控制交通为目的的预测。
在交通流量预测中,短时交通流量预测受时变性、不确定性和随机因素的影响,预测难度要大于中长期交通流量预测,但由于预测间隔短,预测精度要高于后者,并且具有更高的时效性,所以研究短时交通流量预测具有更高的实际意义和价值,结合上一章节对交叉路口交通流量预测意义的论述,本论文将研究城市关联交叉路口的短时交通流量预测。
.........................
2.2 交通流基本特征参数
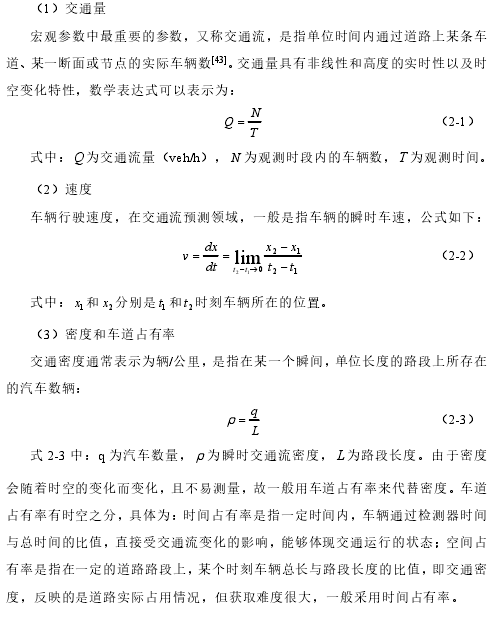
交通流特征参数是反映和描述交通流特性的物理量,有宏观和微观参数之分。宏观参数是对交通流整体特性的描述,包括交通量、速度和密度,通常为了方便测量,用车道占有率来代替密度;微观参数是描述交通流内部车辆之间的关系特性,包括车头间距和车头时距[42]。现将交通流预测中用的较多的宏观参数作简要介绍:
(1)交通量
宏观参数中最重要的参数,又称交通流,是指单位时间内通过道路上某条车道、某一断面或节点的实际车辆数[43]。交通量具有非线性和高度的实时性以及时空变化特性,数学表达式可以表示为:
.......................
第 3 章 遗传神经网络理论与模型的建立..........................14
3.1 神经网络特点................................14较强的时间相关性、高度的非线性以及不确定性是城市交叉路口交通流的主要特征,这些特征使得包括历史数据法、时间序列法和模型法在内的传统交通流预测方法已经不能取得令人满意的效果。因此,城市交叉路口的交通流预测成为智能交通系统研究的主要领域,且 ITS 主要研究的是短时交通流量预测,即预测的时间间隔不超过 15 分钟[4]。ITS 与短时交通流量预测结合的意义主要有:
(1)提前预测交叉路口流量并结合智能交通诱导系统实现对交通的诱导;
(2)动态控制交通信号,结合信号控制系统提高交叉路口通行能力,降低交通延误[5][6];
(3)规划合理的车辆行程线路,预测行程时间。
综上所述,针对交叉路口的短时交通流量预测具有重要的实践意义,并且城市关联交叉路口之间的交通流特性由于其相近的地理位置一定存在一定的联系和相似性,根据其联系即可通过已知观测点预测相连的节点流量,这对于相连交叉路口的信号配时、流量分配以及提高道路利用效率有重要作用。本文以海信网络科技公司“交通智能管控平台”交通诱导模块的预研课题为背景,主要针对城市关联交叉路口进行研究。
..........................
1.2 交通流预测研究现状
车辆诱导和交通控制的实现是要有准确的、实时的交通流预测作为支撑,因此伴随着 ITS 的快速发展,短时交通流量预测成为国内外学者普遍关注的重点领域,也产生了很多优秀的模型及算法,推动了交通流预测领域的发展。本节将主要论述国内外交通流预测模型及相关的智能优化算法的研究现状。
1.2.1 交通流量主要预测模型
自上世纪六七十年代起,全球各领域各学科的科研人员和学者就开始利用各自领域的方法尝试对短时交通流量进行预测,创造出了很多优秀的预测模型,如图 1.1 所示,主要有基于统计方法的模型、非线性理论模型、智能理论模型、组合预测模型以及其他模型这五大类[7]。这些优秀的算法虽然或多或少的存在着局限性,应用场景和应用范围也不尽相同,但无一例外的都推动了交通流预测领域的发展。
.................................
第 2 章 短时交通流预测相关理论
2.1 短时交通流量预测概念
交通流量是描述交通流特性最重要的参数之一,又称交通量,是指在单位时间内通过道路某一车道、某一地点或某一断面的实际车辆数[41]。
交通流量预测是指在已知交通数据的基础上,采用某种技术手段找出历史数据间的内在规律,通过其规律计算出目标数据,进而达到预测未来交通数据的目的。在交通流量预测中,除了根据预测间隔(一般为 15min)分为短时、长期交通流预测外,还可根据预测的目的和用途以及采集的流量数据不同分为很多种类:根据不同的预测对象可以分为道路路段流量预测和道路交叉口流量预测;根据不同的预测用途可以分为以诱导交通为目的的预测和以控制交通为目的的预测。
在交通流量预测中,短时交通流量预测受时变性、不确定性和随机因素的影响,预测难度要大于中长期交通流量预测,但由于预测间隔短,预测精度要高于后者,并且具有更高的时效性,所以研究短时交通流量预测具有更高的实际意义和价值,结合上一章节对交叉路口交通流量预测意义的论述,本论文将研究城市关联交叉路口的短时交通流量预测。
.........................
2.2 交通流基本特征参数
交通流特征参数是反映和描述交通流特性的物理量,有宏观和微观参数之分。宏观参数是对交通流整体特性的描述,包括交通量、速度和密度,通常为了方便测量,用车道占有率来代替密度;微观参数是描述交通流内部车辆之间的关系特性,包括车头间距和车头时距[42]。现将交通流预测中用的较多的宏观参数作简要介绍:
(1)交通量
宏观参数中最重要的参数,又称交通流,是指单位时间内通过道路上某条车道、某一断面或节点的实际车辆数[43]。交通量具有非线性和高度的实时性以及时空变化特性,数学表达式可以表示为:
.......................
第 3 章 遗传神经网络理论与模型的建立..........................14
3.2 神经网络基本原理...............................15
第 4 章 基于遗传神经网络的交通流预测模型..............................30
4.1 交通流数据可预测性分析.............................30
4.2 基于 BP 神经网络的交通流预测............................32
第 5 章 基于花授粉算法的神经网络交通流预测模型..............................43
5.1 花授粉算法简介.......................43
5.2 花授粉算法.......................43
第 5 章 基于花授粉算法的神经网络交通流预测模型
5.1 花授粉算法简介
2012 年,英国学者 Yang 受显花植物花授粉过程的启发,提出了花授粉算法(Flower Pollination Algorithm,FPA)[48],并于 2013 年通过大量实验证明了花授粉算法在解决多目标优化问题时的性能要优于粒子群优化(particle swarmoptimization,PSO)算法和遗传算法(genetic algorithm,GA)等智能优化算法,引发研究人员的普遍关注。花授粉算法是一种新型元启发式群智能算法,采用莱维(Levy)飞行机制[49],同时该算法融合了布谷鸟(cuckoo search,CS)算法[50]和蝙蝠算法(bat algorithm,BA)[51]的优点,具有结构简单,参数较少,易于编程,易于实现,无需梯度信息等优点,被广泛应用于多目标函数优化、文本聚类、生产调度等多领域。
根据授粉对象的不同,可以将显花植物的授粉方式分为两种:自花授粉和异花授粉。在一般情况下,自花授粉是同一种显花植物的不同花之间进行传粉或者显花植物的花粉粒落到了同一朵花的柱头上,并能进行正常的受精结实过程;异花授粉存在于两性花之间,是指同一种显花植物的雌蕊接受雄蕊的花粉完成受精过程。一般认为,异花授粉的传粉者能够飞行很长的距离,且跳或者飞行的行为服从 Levy 分布,所以将这种授粉方式称之为全局授粉;相应的,另一种自花授粉方式被称之为局部授粉。2012 年,英国学者 Yang 受显花植物花授粉过程的启发,提出了花授粉算法(Flower Pollination Algorithm,FPA)[48],并于 2013 年通过大量实验证明了花授粉算法在解决多目标优化问题时的性能要优于粒子群优化(particle swarmoptimization,PSO)算法和遗传算法(genetic algorithm,GA)等智能优化算法,引发研究人员的普遍关注。花授粉算法是一种新型元启发式群智能算法,采用莱维(Levy)飞行机制[49],同时该算法融合了布谷鸟(cuckoo search,CS)算法[50]和蝙蝠算法(bat algorithm,BA)[51]的优点,具有结构简单,参数较少,易于编程,易于实现,无需梯度信息等优点,被广泛应用于多目标函数优化、文本聚类、生产调度等多领域。
.........................
第 6 章 总结与展望
随着经济的迅猛发展和城市化进程的加速推进,交通问题受到人们越来越多的重视,智能交通系统随之应运而生,为解决城市交通问题提供了手段和途径,而准确的交通流量预测是其实现的前提和基础。本文针对城市交叉路口的短时交通流预测进行了研究,根据交通流不确定性和非线性的特点,在分析现实交通流数据和国内外已有预测方法的基础上,选择应用神经网络方法来进行数据建模。本文主要完成的工作和结论如下:
随着经济的迅猛发展和城市化进程的加速推进,交通问题受到人们越来越多的重视,智能交通系统随之应运而生,为解决城市交通问题提供了手段和途径,而准确的交通流量预测是其实现的前提和基础。本文针对城市交叉路口的短时交通流预测进行了研究,根据交通流不确定性和非线性的特点,在分析现实交通流数据和国内外已有预测方法的基础上,选择应用神经网络方法来进行数据建模。本文主要完成的工作和结论如下:
(1)介绍了智能交通系统的发展背景,确定了针对城市交叉路口的短时交通流预测具有的重要实践意义。通过对交通流预测模型和预测方法的研究,明确了 BP 神经网络在交通流量这种非线性系统预测中的优势。
(2)阐述短时交通流预测的概念和特征参数、神经网络的特点和原理,说明实验数据来源和预测评价指标,分析交通流数据的时空特性,以三层 BP 网络为例描述其学习过程和缺陷,为建立遗传神经网络交通流预测模型奠定了理论基础。
(3)验证实验数据的可预测性、完整性和混沌性,提出一种概率自适应遗传神经网络交通流预测模型,接着将其与基于 BP 神经网络和基于遗传神经网络的交通流预测模型进行预测仿真对比实验。通过对比实验表明,提出的概率自适应遗传神经网络交通流预测模型相比其他两种模型,取得了更好的预测效果。
(4)为了解决 BP 神经网络在调整网络权值和阈值时收敛速度慢、易陷入局部极小值的缺陷,提出了一种改进的 FPA-BP 网络模型。FPA 算法有着较好的全局寻优能力,可用来优化 BP 网络,通过对 FPA 算法的分析,本文提出通过三个方面来优化 FPA 算法,分别为采用对立点搜索优化初始种群、改进转换概率以及提出了一种“距离差”局部授粉策略,两种算法的融合最大限度地发挥了各自的优势。与 IGA-WNN 模型的仿真对比实验也证明了改进后的 FPA-BP 网络预测模型拥有更快的收敛速度和更高的学习能力,更适合于城市交叉路口的短时交通流量预测。
参考文献(略)
(2)阐述短时交通流预测的概念和特征参数、神经网络的特点和原理,说明实验数据来源和预测评价指标,分析交通流数据的时空特性,以三层 BP 网络为例描述其学习过程和缺陷,为建立遗传神经网络交通流预测模型奠定了理论基础。
(3)验证实验数据的可预测性、完整性和混沌性,提出一种概率自适应遗传神经网络交通流预测模型,接着将其与基于 BP 神经网络和基于遗传神经网络的交通流预测模型进行预测仿真对比实验。通过对比实验表明,提出的概率自适应遗传神经网络交通流预测模型相比其他两种模型,取得了更好的预测效果。
(4)为了解决 BP 神经网络在调整网络权值和阈值时收敛速度慢、易陷入局部极小值的缺陷,提出了一种改进的 FPA-BP 网络模型。FPA 算法有着较好的全局寻优能力,可用来优化 BP 网络,通过对 FPA 算法的分析,本文提出通过三个方面来优化 FPA 算法,分别为采用对立点搜索优化初始种群、改进转换概率以及提出了一种“距离差”局部授粉策略,两种算法的融合最大限度地发挥了各自的优势。与 IGA-WNN 模型的仿真对比实验也证明了改进后的 FPA-BP 网络预测模型拥有更快的收敛速度和更高的学习能力,更适合于城市交叉路口的短时交通流量预测。
参考文献(略)