第 1 章 绪 论
1.1 论文的研究背景
1.1.1 研究背景
随着社会公共安全受到越来越多的关注,人类身份认证技术迎来了更大的挑战。传统的身份认证主要采用身份标示物来确定其身份,如身份证、登录密码、ID 卡等。然而这些标识物存在着各种不安全因素:登录密码容易遗忘或记错,身份证和 ID 卡容易丢失或伪造。一旦这些身份标识物被他人获取后,易导致严重的后果。因此,急需一种更加方便、有效、安全的身份密钥。
生物识别技术[1-4]依靠人类自身固有的生理或行为特征进行身份认证。其具有不易遗忘、防伪性能好、随时随地可用等优点。尤其是人脸识别技术,由于它的无侵害性和对用户自然直观的方式,使其逐渐成为重要的身份验证手段,并开始应用于电子商务、安防监控、电子政务、医疗等领域。
1.1 论文的研究背景
1.1.1 研究背景
随着社会公共安全受到越来越多的关注,人类身份认证技术迎来了更大的挑战。传统的身份认证主要采用身份标示物来确定其身份,如身份证、登录密码、ID 卡等。然而这些标识物存在着各种不安全因素:登录密码容易遗忘或记错,身份证和 ID 卡容易丢失或伪造。一旦这些身份标识物被他人获取后,易导致严重的后果。因此,急需一种更加方便、有效、安全的身份密钥。
生物识别技术[1-4]依靠人类自身固有的生理或行为特征进行身份认证。其具有不易遗忘、防伪性能好、随时随地可用等优点。尤其是人脸识别技术,由于它的无侵害性和对用户自然直观的方式,使其逐渐成为重要的身份验证手段,并开始应用于电子商务、安防监控、电子政务、医疗等领域。
1.1.2 选题意义
常见的生物特征识别技术有:指纹、虹膜、人脸、气味、DNA、手背脉纹、签名、语音、步态等[5-10]。然而在实际应用中,受传感器与生物特征识别算法的影响,单模态生物识别系统并不能满足识别性能要求苛刻的复杂环境(机场、车站等);同时,伪造技术的发展使得单模态生物识别系统越来越容易被虚假特征所欺骗。多模态生物特征识别技术可以在一定程度上弥补单模态特征识别的不足,近年来受到了越来越多的关注并得到了快速的发展。
多模态生物身份特征识别系统从一个或多个传感器获得特征 信息,从而对两个或更多个不同模态的生物特征进行识别。它融合了多种单一生物特征的特性,能获得更好的识别性能和可靠性,并增加了伪造人体生物特征的难度和复杂性,提高了系统的安全性。与单模态生物识别系统相比,多模态生物特征融合在准确性、可靠性和适应性等方面有了很大的提高。
常见的生物特征识别技术有:指纹、虹膜、人脸、气味、DNA、手背脉纹、签名、语音、步态等[5-10]。然而在实际应用中,受传感器与生物特征识别算法的影响,单模态生物识别系统并不能满足识别性能要求苛刻的复杂环境(机场、车站等);同时,伪造技术的发展使得单模态生物识别系统越来越容易被虚假特征所欺骗。多模态生物特征识别技术可以在一定程度上弥补单模态特征识别的不足,近年来受到了越来越多的关注并得到了快速的发展。
多模态生物身份特征识别系统从一个或多个传感器获得特征 信息,从而对两个或更多个不同模态的生物特征进行识别。它融合了多种单一生物特征的特性,能获得更好的识别性能和可靠性,并增加了伪造人体生物特征的难度和复杂性,提高了系统的安全性。与单模态生物识别系统相比,多模态生物特征融合在准确性、可靠性和适应性等方面有了很大的提高。
...........................
1.2 国内外研究现状及发展趋势
目前常见的多模态身份识别系统都是受控条件下的系统:要求用户与传感器接触---接触式(指纹和掌型)识别系统,或要求用户在近距离面对传感器---非接触式(人脸、虹膜、声音等)识别系统。这些系统在合作用户的应用中可以得到满足,如电子护照、门禁、考勤等。然而,随着计算机技术的发展和人们对社会公共安全 、个人信息安全需求的提高,对中远距离身份认证系统的准确性及安全性的要求也日益提高。中远距离、非接触、多模态的身份识别系统对在机场、银行、车站等关系到社会安全的特定场所的视频监控有着重要的现实意义和实用价值。
人脸特征被广泛应用于近距离的身份认证系统中。然而其对光照、位姿、表情、距离等变化敏感,尤其是远距离下的人脸识别技术还有待进一步提高。与其他生物特征相比,步态具有独特性、非侵犯性、难伪装性、远距离可识别等优点,近年来受到越来越多的关注。
1.2.1 人脸识别研究
人脸识别研究[11-12]越来越受到学术和商业界的关注,并在近距离身份识别领域取得了一定的成就。目前较为成功的人脸识别技术主要分为三类。第一类是基于几何特征的人脸识别方法,该类方法利用几何特征提取人脸的面部器官(眼睛、鼻子、嘴巴、下巴等),提取的几何特征比较稳定,对姿态变化和光照改变有较强的鲁棒性。第二类是基于弹性图匹配方法,该类方法可对包含多种变形的样本(表情变化和旋转)进行识别,然而由于需要对每个存储的人脸计算其模型图,计算量和存储量都较大。第三类是基于子空间分析的人脸识别,该类方法将原始人脸图像从高维空间投影到低维子空间进行判别。常用的方法有主成分分析、线性判决分析和独立成分分析方法。然而,就目前的研究现状而言,光照、姿态、遮挡等干扰因素对检测算法的影响要远大于对识别算法的影响。因此当前人脸识别研究中的当务之急是解决不可控条件下的人脸识别。
.............................
第 2 章 基于步态的生物识别研究
2.1 预处理
2.1.1 预处理的过程
行人的步态特征是通过对行人的侧影图像进行处理以提取表征步态的动态或静态特征。侧影图像的质量决定了步态特征的识别能力。通常从视频图像获得的侧影图像存在较多干扰。为获得高质量的步态侧影图像,需要对由相机捕获的视频序列进行预处理。预处理过程为:运动目标检测、形态学处理、侧影图像归一化、步态周期提取几步。
步骤一:提取运动目标
目前常见的多模态身份识别系统都是受控条件下的系统:要求用户与传感器接触---接触式(指纹和掌型)识别系统,或要求用户在近距离面对传感器---非接触式(人脸、虹膜、声音等)识别系统。这些系统在合作用户的应用中可以得到满足,如电子护照、门禁、考勤等。然而,随着计算机技术的发展和人们对社会公共安全 、个人信息安全需求的提高,对中远距离身份认证系统的准确性及安全性的要求也日益提高。中远距离、非接触、多模态的身份识别系统对在机场、银行、车站等关系到社会安全的特定场所的视频监控有着重要的现实意义和实用价值。
人脸特征被广泛应用于近距离的身份认证系统中。然而其对光照、位姿、表情、距离等变化敏感,尤其是远距离下的人脸识别技术还有待进一步提高。与其他生物特征相比,步态具有独特性、非侵犯性、难伪装性、远距离可识别等优点,近年来受到越来越多的关注。
1.2.1 人脸识别研究
人脸识别研究[11-12]越来越受到学术和商业界的关注,并在近距离身份识别领域取得了一定的成就。目前较为成功的人脸识别技术主要分为三类。第一类是基于几何特征的人脸识别方法,该类方法利用几何特征提取人脸的面部器官(眼睛、鼻子、嘴巴、下巴等),提取的几何特征比较稳定,对姿态变化和光照改变有较强的鲁棒性。第二类是基于弹性图匹配方法,该类方法可对包含多种变形的样本(表情变化和旋转)进行识别,然而由于需要对每个存储的人脸计算其模型图,计算量和存储量都较大。第三类是基于子空间分析的人脸识别,该类方法将原始人脸图像从高维空间投影到低维子空间进行判别。常用的方法有主成分分析、线性判决分析和独立成分分析方法。然而,就目前的研究现状而言,光照、姿态、遮挡等干扰因素对检测算法的影响要远大于对识别算法的影响。因此当前人脸识别研究中的当务之急是解决不可控条件下的人脸识别。
.............................
第 2 章 基于步态的生物识别研究
2.1 预处理
2.1.1 预处理的过程
行人的步态特征是通过对行人的侧影图像进行处理以提取表征步态的动态或静态特征。侧影图像的质量决定了步态特征的识别能力。通常从视频图像获得的侧影图像存在较多干扰。为获得高质量的步态侧影图像,需要对由相机捕获的视频序列进行预处理。预处理过程为:运动目标检测、形态学处理、侧影图像归一化、步态周期提取几步。
步骤一:提取运动目标
背景减除法是一种有效的运动目标检测算法,其思想通过建立背景模型得到背景图像,将当前帧图像与背景图像进行差分比较从而检测运动区域,其中与背景像素区域区别较大被认为是运动区域,而区别较小的像素区域被认为是背景区域。本文通过混合高斯建模方法对背景图像进行建模,然后利用当前图像与背景图像的差分检测出包含行人的前景图像。进而根据设定阈值对前景图像进行二值化操作,使得作为前景的人体步态侧影图像为白色,背景图像为黑色。
步骤二:形态学处理
受光照等干扰因素的影响,由背景减除法获得的步态侧影图像中含有大量 的噪声以及空洞。为去除这些干扰因素,使用形态学算子进一步处理。首先,应用开运算即先腐蚀后膨胀,在保留图像原有形状和尺寸的情况下消除散点以及毛刺。然后,应用闭运算即先膨胀后腐蚀,以填充人体侧影图像中的小空洞。
步骤二:形态学处理
受光照等干扰因素的影响,由背景减除法获得的步态侧影图像中含有大量 的噪声以及空洞。为去除这些干扰因素,使用形态学算子进一步处理。首先,应用开运算即先腐蚀后膨胀,在保留图像原有形状和尺寸的情况下消除散点以及毛刺。然后,应用闭运算即先膨胀后腐蚀,以填充人体侧影图像中的小空洞。
步骤三:侧影图像归一化
受人体场景深度变化的影响,所获得的人体侧影图像尺寸大小不一。故由此提取的步态特征无法表征行人行走过程的动作变化。为解决这一问题,将所提取的步态侧影图像归一化,归一化后的尺寸为120×200 。
...........................
受人体场景深度变化的影响,所获得的人体侧影图像尺寸大小不一。故由此提取的步态特征无法表征行人行走过程的动作变化。为解决这一问题,将所提取的步态侧影图像归一化,归一化后的尺寸为120×200 。
...........................
2.2 基于动态特征和行走方向的步态识别
2.2.1 步态动态特征提取
步态光流图指采用Horn-Schunck(HS)光流法对一个步态周期内,任意相邻两帧步态侧影图像计算稠密光流场,得到表征行人在行走过程中的帧间动态特征。然后对计算得到的一个步态周期内的步态侧影光流场进行统计,最后获得步态光流图(Gait Flow Image, GFI)。由于该方法计算得到的光流场表征了行人的帧间运动信息,故由此获得的步态光流图保留了行人在一个步态周期内的运动特征。Lam 采用 GFI 进行步态识别,在正面视角下获得了较高的识别率。然而,在帧间光流场的计算过程中,采用 Horn-Schunck 光流法。该方法计算的是两幅图像间的稠密光流,故需要角点数量较大,从而造成光流场计算过程中耗时较大。由此获得的光流场图象作为步态特征用于步态识别,无法满足身份识别过程的实时性要求。
2.2.1 步态动态特征提取
步态光流图指采用Horn-Schunck(HS)光流法对一个步态周期内,任意相邻两帧步态侧影图像计算稠密光流场,得到表征行人在行走过程中的帧间动态特征。然后对计算得到的一个步态周期内的步态侧影光流场进行统计,最后获得步态光流图(Gait Flow Image, GFI)。由于该方法计算得到的光流场表征了行人的帧间运动信息,故由此获得的步态光流图保留了行人在一个步态周期内的运动特征。Lam 采用 GFI 进行步态识别,在正面视角下获得了较高的识别率。然而,在帧间光流场的计算过程中,采用 Horn-Schunck 光流法。该方法计算的是两幅图像间的稠密光流,故需要角点数量较大,从而造成光流场计算过程中耗时较大。由此获得的光流场图象作为步态特征用于步态识别,无法满足身份识别过程的实时性要求。
LK 光流法是计算帧间图像的稀疏光流场的常用方法。与 HS光流法不同,LK 光流 法先提取具有明显特征的角点作为被跟踪角点,然后计算这些 角点在相邻帧图 像间的光流场。该方法所需角点数量明显少于HS光流法所需的角点数,从而降低了光流场计算所需的耗时。故利用 LK 方法提取一个周期内的步态光流图像,在提取步态动态特征的同时,降低步态识别所需耗时。
对从相机捕获包含行人的视频序列进行图像处理,以得到归一化的步态侧影图像及步态周期。然后利用 LK 光流法计算任意相邻两帧步态侧影图像间的光流场:
..........................
对从相机捕获包含行人的视频序列进行图像处理,以得到归一化的步态侧影图像及步态周期。然后利用 LK 光流法计算任意相邻两帧步态侧影图像间的光流场:
..........................
3.1 基于 AdaBoost 学习实现变姿态下的人脸检测研究 ········· 23
3.1.1 人脸特征 ················· 23
3.1.2 基于 Ada Boost 算法的层叠分类器 ····················· 24
第 4 章 基于改进多示例学习算法的目标跟踪 ··················· 33
4.1 在线多示例学习算法 ······················ 33
4.2 改进在线多示例学习算法 ················ 35
第 4 章 基于改进多示例学习算法的目标跟踪
4.1 在线多示例学习算法
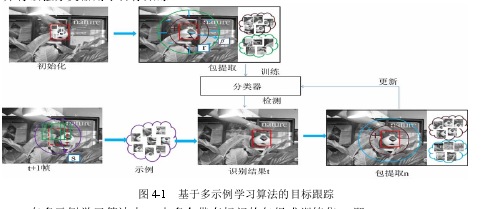
在线多示例学习算法是指在 Online Boosting 框架下实现多示例学习的算法,算法流程如图 4-1 所示。该算法的思想是通过迭代多个弱分类器产生最终的强分类器,并将该强分类器用于目标跟踪。
4.1 在线多示例学习算法
在线多示例学习算法是指在 Online Boosting 框架下实现多示例学习的算法,算法流程如图 4-1 所示。该算法的思想是通过迭代多个弱分类器产生最终的强分类器,并将该强分类器用于目标跟踪。
........................
结论
本文将步态特征引入到多模态身份认证系统中。与传统的多模态身份认证系统相比,结合步态与人脸特征的识别系统的优势主要体现在以下方面:1)不受距离限制;2)不受视角影响,当人背离相机时仍然可识别;3)受硬件(相机像素)影响小。
本文提取步态的动态特征和静态特征,并与视角相结合实现身份识别,提高了步态描述子的可分性,解决传统步态识别受视角影响的问题。 提出利用 LK 光流法提取一个步态周期内的步态光流图像,极大程度的保留了步态的动态特征
提出利用 Procruestus 分析法对一个步态周期内的步态头肩图像进行统计,获得表征步态静态特征的头肩均值形状的近似表示。根据金字塔结构实现Ada Boost 人脸检测完成多姿态的人脸检测。然后针对每个姿态下的人脸图像建立 AAM模型,定位人脸特征点。根据人脸特征点定位结果完成人脸关键部件提取。提出基于人脸关键部件稀疏表示的人脸识别方法:人脸姿态变化时,根据关键部件的稀疏表示进行人脸识别,提高了多姿态人脸识别的识别率。
我们所研究的基于步态和人脸特征的身份识别系统经典型数据库验证,识别率较高。然而,在实际视频监控中,尤其是公共场合中的身份识别系统中,受行人姿态、外界环境的影响,识别率明显下降。为解决这一问题,我们采用边跟踪边识别的身份识别。在检测到目标图像后,利用在线多示例学习算法对其进行跟踪,并实时获得目标图像。最后,对所提取的目标图像与图像库中的数据进行比对。
基于步态和人脸特征的身份识别技术将成为智能监控系统在学术、工程和商业领域发展应用的一大热点 ,在今后的学习工作中将继续对其进行密切关注,并投入精力系统深入的研究。
参考文献(略)