本文是一篇机械论文,本文建立考虑随机气隙偏心影响下的轮毂电机电动汽车振动模型。从轮胎系统、电机系统和簧载系统三部分着手,对轮毂电机在运行过程中由气隙偏心导致的整车动态响应进行分析。
1 绪论
1.1 研究背景及意义
随着各国经济的快速增长,石油、煤这类传统不可再生资源正在被急剧消耗,同时也加剧了对空气的污染,为了解决不可再生能源枯竭和空气污染等问题,各国都在积极研究开发新的可再生无污染的能源作为传统能源的替代[1]。与燃油汽车相比,纯电动汽车因其无污染、能源利用率高和易于实现智能控制等优势,逐渐成为汽车发展的主流方向[2]。而轮毂电机因其结构紧凑和便于实现对单个车轮独立控制等优势,受到各大汽车公司广泛关注[3-4]。
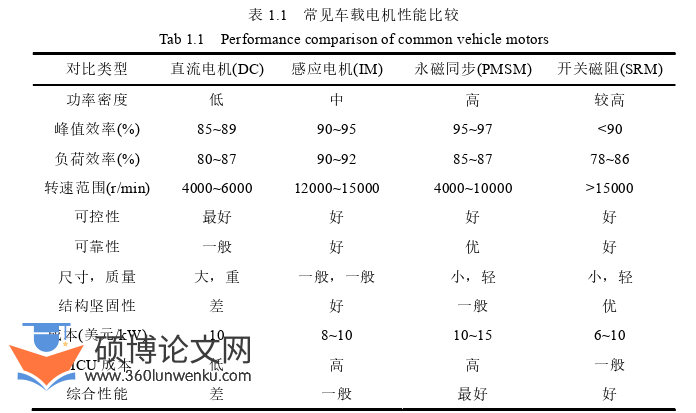
相对于传统燃油车和驱动电机中置的电动汽车而言,在两个或四个车轮中分别放置电机以达到直接驱动车辆行驶的方式称为分布式驱动。由于取消了部分传动装置, 不仅降低了驱动系统质量和传动噪声,而且在提升车辆传动效率的同时更便于整车布局[5]。轮毂电机作为分布式驱动车辆的主要动力模块,由于其运行环境更为恶劣,要求比中置式驱动电机具有更好的适应性能[6]。常见车载电机性能对比如表1.1所示。永磁同步电机因其能效高、无转子励磁导致铜耗等优点,最适合轮毂电机驱动系统的安装要求。因此,本文选用永磁同步电机作为轮载电机进行研究。
机械论文怎么写
.........................
1.2 国内外研究现状
1.2.1 轮毂电机电动汽车发展现状
1896年,费迪南德研发出世界上第一台轮毂电机,直到上世纪七十年代,该技术才被美国通用汽车公司运用到采矿运输车上[14]。随着轮毂电机驱动技术优势日趋彰显,各国汽车公司、研究院及高校对该技术都加大了研发力度。由于日本和欧美等国在电机驱动上的研究相对成熟,近些年该技术一直由这些发达国家引领发展[15]。20世纪初,由庆应义塾大学研发出使用8轮毂电机减速驱动技术的电动汽车KAZ,其转子与行星减速结构并排布置使得总输出功率最大可达440kW,最高时速为311km/h[16]。20世纪末,由日本研制的Luciole纯电动车,虽然仅在车辆后轮使用轮毂驱动技术但总功率依然能达到72kW。2010年,在巴黎车展由Venturi与米其林联合推出由轮毂电机驱动的Volage跑车,搭载由Sacha Lakic设计的双电机主动轮,其在道路适应性和驱动性方面堪称完美。
在国家愈发重视纯电动汽车发展的前景下,我国轮毂电机驱动技术的研发也获得很大的进步。2002年,由同济大学研制的微型电动车,使用的就是永磁无刷直流轮毂电机。哈尔滨工业大学研发的EV96-1纯电动汽车,就是由外转子永磁同步轮毂电机进行驱动。2009年,由奇瑞公司推出的瑞麟X1电动汽车,也是使用轮毂电机驱动技术。吉林大学依托一汽旗下的两款汽车作为研发平台,研制出以轮毂电机作为动力的纯电动车。2011年,由广州汽车集团研发出由8个子电机及其控制系统集成的双后轮驱动电动汽车,其最大功率可达166kW。2018年,由华人运通研发的具有四轮转向驱动功能的HOV-RE05电动车,其可根据不同工况进行14种智能驱动,且驱动轮都可依据路况来选择变换方向以实现实时正反转,使其拥有极高自由度。
...........................
2 永磁同步轮毂电机数学模型及控制策略
2.1 轮毂电机基本结构与工作原理
2.1.1 基本结构
轮毂电机就是将动力和制动等装置安放于车轮中,从而形成一个系统为车辆提供驱动力,通过转子安置位置可将轮毂电机分为以下两种类型:无减速机构的转子外置式和有减速机构转子内置式[46]。对于转子外置式轮毂电机而言,通常其最高转速为1500r/min,由于外转子与轮毂直接相连,缺少了减速机构等传动部件使得整个系统具备更快的响应速度和传动效率且维修成本便宜,但其制造成本较高,在上坡或者急加速时电机要承受巨大的电流,容易降低储能机构和永磁体的使用寿命。对于转子内置式而言,其最高转速可达到10000r/min,电机内部还搭配了减速机构,具有比功率高、体积小、质量轻以及低速运行时动力输出平稳等优点。由于内部润滑比较困难,极易导致减速器齿轮损耗,且散热及隔音效果不理想;同时其内部结构复杂,而现有制造工艺不成熟,使其运行稳定性较低。有、无减速机构的轮毂电机如图2.1所示。永磁同步电机以其体积小、质量轻、能效高、无励磁铜耗且控制便捷等优点被广泛应用在航空、军工和民用动力系统等多种场合。
2.1.2 工作原理
在轮毂电机中,电路的通闭由转子位置信号来决定的,通过对绕组的通电顺序及时间进行干预,达到控制磁场旋转的目的,从而产生驱动电机的电磁扭矩。具体工作原理如下:首先将三相交流电接入到电机的定子绕组中,此时定子绕组将会生成一个旋转的磁场其并且与转子上永磁体产生的主磁场互相作用,同时在定转子之间的气隙中产生出一个合成气隙磁场,当镶嵌的永磁体在受到合成气隙旋转磁场的作用下,将会产生推动电机旋转的电磁转矩从而带动转子旋转。由于转子转速低于磁场转速,在经过电机调节后转子的旋转速度将逐渐和旋转磁场的速度达到同步。
.........................
2.2 轮毂电机数学模型
由于定转子之间存在相对运动,且电机合成气隙磁场的位置也随时间不断的变化,因此电机的电磁耦合特性与定转子的参数有着密切联系。为了便于理论分析和研究,本文先假设电机实时处于理想状态下且满足以下条件:
(1)电机定、转子铁芯的饱和可以忽略不计;
(2)电机的涡流损耗及磁滞损耗能够忽略不计;
(3)当不考虑温度对定子绕组产生的影响时,给电机定子绕组中通入的电流为对称的三相正弦波电流,且转子与其上镶嵌的永磁体没有阻尼作用[48]。
通过实践证明,根据假设条件对电机进行理论分析与研究时,其所产生的误差是符合工程允许范围内的。因此,基于上述理想状态下的假设条件对永磁同步电机进行理论分析是可行的。
2.2.1 坐标变换理论
将电机的矢量控制原理在于将两相静止坐标转换(Clarke变换)为两相旋转坐标变换(Park变换),从而对电机数学模型进行简化,使其用控制直流电机的方式来控制交流电机[49]。电机的不同坐标及坐标系变换过程如图2.2和2.3所示。其中ABC为自然坐标系,α-β为静止坐标系,d-q同步旋转坐标系。
.............................
3 随机路面激励下轮毂电机电动汽车振动分析 ........................ 20
3.1 考虑气隙偏心下的车辆振动建模 ............................. 20
3.1.1 随机路面模型 .................................... 20
3.1.2 1/4车辆振动模型 ........................... 22
4 自抗扰控制器设计与车辆振动抑制仿真验证 .................... 37
4.1 自抗扰控制器结构及原理 ............................. 37
4.1.1 ADRC 与 PID 比较分析 ........................... 37
4.1.2 跟踪-微分器 .................................. 38
5 总结与展望.................................... 58
5.1 总结 .......................................... 58
5.2 展望 ........................................ 59
4 自抗扰控制器设计与车辆振动抑制仿真验证
4.1 自抗扰控制器结构及原理
4.1.1ADRC与PID比较分析
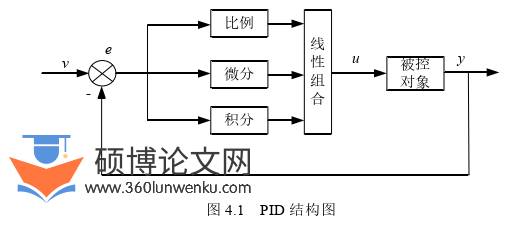
目前工程上大部分的电机伺服系统主要采用比例积分微分控制器。PID出现于20世纪20年代,其核心思想是基于反馈来实现误差消除误差,在不依靠被控对象精准数学模型的基础上,只需获得被控对象输入和输出间的误差就可进行反馈控制[58]。PID具有设计简单、不需要精确模型、易于调节等优点,因此在各领域中广泛应用,经典PID控制器结构图如下图4.1所示[59]
机械论文参考
..........................
5 总结与展望
5.1 总结
轮毂电机在运行过程中受随机路面激励影响造成的轮胎跳动,容易引起电机定转子不对称,导致电机产生气隙偏心从而激发强烈的电磁振动,最终影响电机的稳定运行和驾乘舒适性。本文在现有的研究基础上,针对由随机路面引起轮毂电机偏心导致车辆振动及抑制等问题进行了相关研究,得出以下结论:
(1)相比A级路面,车辆在B、C级路面上行驶时电机位移分别增加了2.00倍和4.20倍、电机振动加速度分别增加了4.96倍和8.89倍、悬架位移分别增加了2.23倍和5.00倍、车身位移分别增加了2.46倍和5.15倍、车身加速度分别增加了3.64倍和5.79倍。结果表明,由路面激励引起的轮毂电机气隙偏心对车辆稳定运行具有极大安全隐患。
(2)与PID控制相比,采用ADRC时轮胎相对动载荷、电机位移、电机加速度、悬架位移和车身加速度在B级路面60km/h时分别降低了11.3%、10.0%、27.3%、10.4%和18.5%;在C级路面60km/h时分别降低了7.1%、6.3%、21.3%、6.2%和15.1%;在车速为100km/h的B级路面上分别降低了9.4%、8.3%、28.7%、10.8%和20.0%;相对不同运行工况而言,车辆在B级路面60km/h时的扰动小,但降低的振动幅值最大。结果表明,ADRC在随机扰动控制的精确性和快速响应方面优于PID控制。
(3)通过ADRC作用后的轮胎相对动载荷、电机位移、电机加速度、悬架位移和车身加速度,在B级路面上分别降低了42.9%、23.3%、68.3%、20.7%和52.3%;在C级路面上分别降低了54.3%、23.8%、75.7%、27.7%和71.8%;相比B级路面C级路面扰动降低更大。结果表明,自抗扰控制策略针对电机偏心电磁振动具有较好的抑制效果,同时也验证了ADRC具有更强的鲁棒性。
参考文献(略)