本文是一篇机械论文,本文设计了一种3D卷积神经网络模型,用于提取中国毛虾张网渔船电子监控系统数据中的复杂时序信息。日本鲭灯光敷网渔船的捕捞过程也较为复杂,但是日本鲭灯光敷网渔船能够提供的算力较小,3D卷积的方式虽然能够提取出时序信息,但是也会耗费大量的计算资源。
1. 绪论
1.1 背景与意义
随着生活条件的日益改善,我国人民群众对食品的质量和营养价值提出了更高的要求。渔业产品因其鲜美的口感和丰富的营养价值受到市场的持续青睐,渔业经济也已经成为了我国经济的重要组成部分。我国的海域辽阔,在海洋捕捞领域具有得天独厚的优势。根据《2022中国渔业统计年鉴》,我国2021年渔业经济总产值达到296879263.7万元,相较2020年提升了21462594.34万元。渔船是海洋捕捞产业链上游端的重要组成部分,因此针对渔船的研究是渔业研究最常见的着力点之一。近年来,过度捕捞[1]的现象受到了国际社会的广泛关注,渔业的可持续发展[2]迫在眉睫。2017年,农业农村部印发了《关于进一步加强国内渔船管控实施海洋渔业资源总量管理的通知》,提出了新的渔船管理机制。在新的渔船管理机制下,渔船按照其船长划分为大、中、小型渔船,并进行差别化监管。这些政策在一定程度上有效降低了渔船的数量,但是由于基数较大,我国目前的渔船数量仍然较多。《全国渔业经济统计公报》显示,2021年末我国渔船总数为52.08万艘,总吨位1001.58万吨。其中,机动渔船35.70万艘、总吨位977.48万吨、总功率1845.20万千瓦;非机动渔船16.39万艘、总吨位为24.10万吨。
渔业经济的经久不衰导致了渔船数量的居高不下,但是渔船数量过多同时也导致了捕捞不规范、非法捕捞等现象。渔船出海后,具体的作业过程难以监控。当前主要依靠船舶自动识别系统(Automatic Identification System,AIS)、船舶监控系统(Vessel Monitoring System, VMS)等船位系统完成对渔船的监控和行为识别。但是船位信息仅能监控到渔船的实时位置,一些学者研究船位信息与渔船捕捞行为之间的关系,构建了多种模型,但是船位数据自身的局限性导致了无法进行更加精确的渔船捕捞行为识别。而精确的渔船捕捞行为能够进一步规范渔船的捕捞作业、提高生产效率、保障生产安全。
机械论文怎么写
............................
1.2 国内外研究现状
1.2.1 卷积神经网络应用
卷积神经网络(Convolutional Neural Network, CNN)是深度学习中的一个重要内容,在计算机视觉领域的深度学习中发挥着重要作用。深度学习(Deep Learning)是机器学习的一个分支[3],关于深度学习的研究最早可以追溯到20世纪40年代。1943年,Mcculloch W S和Pitts W.A提出神经活动中内在思想的逻辑演算,正式开启近代关于深度学习的研究[4]。近年来,卷积神经网络为人工智能技术在自动控制系统[5,6]、人脸识别[7,8]、自动驾驶[9,10]等领域中的快速增长提供了强大动力。深度学习在水产及船舶领域的应用也已见雏形。部分学者利用深度学习算法,对复杂海况下的船舶识别[11,12]、船舶定位[13]等课题展开研究。
早在上世纪90年代,早期的卷积神经网络研究体系已成雏形。该阶段的CNN研究[14,15]主要集中在模式识别领域,尤其是在手写数字识别领域,达到了领先的识别效果。但是,该阶段的研究存在较大的局限性。由于硬件算力等多方面的因素,该阶段的研究仅在小图片的识别中达到了最佳的识别效果,而对大型数据的识别能力较差[16]。自21世纪以来,抑制梯度消失的预训练[17] 和ReL U激活函数[18] 等方法逐渐被提出,深度学习分类方法的研究达到了高潮。2012年,卷积神经网络AlexNet在ImageNet大规模视觉识别竞赛中登顶,其分类性能远远超过了排名第二的SVM方法。2014年, Krizhevsky等训练了一个大型深度卷积神经网络,将120万张高分辨率图像分为1000个不同的类别,在测试数据集中,Top 1和Top 5错误率分别达到37.5%和17.0%,获得ImageNet大规模视觉识别挑战竞赛的分类效果冠军。深度卷积神经网络在分类任务中的多次优异表现也使其逐渐受到学者重视。
...............................
2. 渔船捕捞行为理论
2.1 渔船捕捞行为
广义的船舶行为指的是船舶一系列航行状态的集合,但是船舶行为仍然缺乏唯一公认的具体区分标准。各领域学者针对其不同的研究目标对船舶行为进行不同的具体分类。例如,朱飞祥等[40]为了从船舶自动识别数据中探索海上交通数据的特点,建立了船舶行为模型。在其船舶行为模型中,集合内的每个元素包括时间、船位、航速、航向等动态属性。文元桥等[41]则提出了更加具体的船舶行为模型。在文元桥等提出的船舶行为模型中,时间、船位、航速、航向等动态信息被作为输入数据,提取出“静止”和“运动”两种原子行为,而原子行为“运动”又依据其具体的运动特征被区分为加速、减速、匀速、左转、右转、直行及其不同组合等多种具体的行为模式,并最终提取出靠泊、离泊等多种船舶语义信息。
渔船是船舶的子集,因此渔船捕捞行为是船舶行为中的一种特殊情况。广义的渔船捕捞行为知识的渔船一系列航行状态的集合。渔船是海上船舶的重要组成部分,是海上交通的重要参与者。而且渔船体量、吨位相对较小,且存在较多行驶不规范等问题,是海上交通监管的重要研究对象。因此渔船捕捞行为对规范海上交通同样具有重大意义。除此之外,渔船主要在海上从事渔业生产活动,在语义层面上应包含更多具体的行为模式。例如,对于需要抛锚放网的捕捞方式,放网、收网等则可以作为特殊的行为进行研究。渔船捕捞行为是语义层的概念,用于推导渔船捕捞行为的原始数据及推导方法具有开放性。船舶自动识别系统AIS和船舶监控系统VMS是目前适用范围较广的船舶监控手段,因此许多学者利用AIS和VMS提供的船位数据对船舶行为进行分析。
............................
2.2 渔船捕捞行为分类
2.2.1 渔船的通用行为
渔船的通用行为即所有渔船均发生的行为。捕捞是渔船的核心任务,因此“捕捞中”行为(fishing)是所有渔船都具备的基本渔船通用行为。虽然一些特定的渔船捕捞行为识别研究将“捕捞中”行为具体到捕捞中的具体步骤(如金枪鱼延绳钓的收网行为、收浮球行为),但是这些具体的渔船捕捞行为仍然是“捕捞中”行为的一部分。除了“捕捞中”行为外,“停靠”、“航行”等行为也是典型的渔船通用行为。由于VMS和AIS数据覆盖范围相对较广(国际海事组织中《国际海上人命安全公约》(SOLAS)要求航行于国际水域且总吨位在300以上的船舶,以及所有不论吨位大小的客船,均应安装AIS系统),当前的渔船捕捞行为识别研究大多使用VMS或AIS数据识别渔船的通用行为。
渔船的通用行为种类较少,特征也相对单一。对渔船通用行为的识别往往只需要处理单元层的1-2个处理要素,且能够达到较高的识别效果。航速是确定渔船通用行为的重要依据,使用航速数据识别渔船通用行为的研究已经较为充分。例如,Natale等[43]使用AIS数据中的航速要素作为识别渔船通用行为的唯一要素。Natale观察单个船只的速度直方图,发现所有船只的速度直方图均显示为双峰结构,认为双峰结构代表了航行和捕鱼两种不同的通用行为。将该识别结果与人工记录的渔捞日志进行比对,达到了足够高的准确率和识别效率。Le等[44]使用AIS数据中的航速要素区分渔船的两种通用行为(捕鱼中和非捕鱼中),并根据渔船的通用行为来进一步确认渔场的捕捞强度。仅根据航速确认渔船通用行为是最基础的渔船捕捞行为识别模式之一,部分学者尝试通过增加其他要素验证的方式提高渔船捕捞行为识别的准确率。例如Wang等[45]则在AIS航速的基础上,根据拖网渔船的特征补充了其他数据支撑。拖网渔船在进行捕捞活动时,会在一段区域内来回拖动,根据船位和航速的综合信息设计的渔船捕捞行为识别模型具有更高的可信度,与渔捞日志比较[46]的匹配率达到了较高水平。总之,渔船的通用行为指的是所有渔船都具备的基础行为。目前关于渔船通用行为的识别研究较为丰富,但是具有数据来源单一、识别方法固定、识别准确率难以验证等缺点。在识别目的角度,对渔船通用行为的识别研究大多是为了反映渔场的捕捞强度,为捕捞努力量[47]的估计提供参考数据。
.................................
3. 基于YOLOV5的金枪鱼延绳钓行为识别 ............................ 13
3.1 数据来源 ................................. 13
3.2 行为划分与数据处理 .............................. 13
4. 基于3DNet的毛虾张网捕捞行为识别 ........................... 22
4.1 数据来源 ......................................... 22
4.2 行为划分 ....................................... 26
5. 基于CNN-LSTM的日本鲭灯光敷网捕捞行为识别 ................................. 34
5.1 数据来源 ..................................... 34
5.2 行为划分与数据处理 ............................... 35
5. 基于CNN-LSTM的日本鲭灯光敷网捕捞行为识别
5.1 数据来源
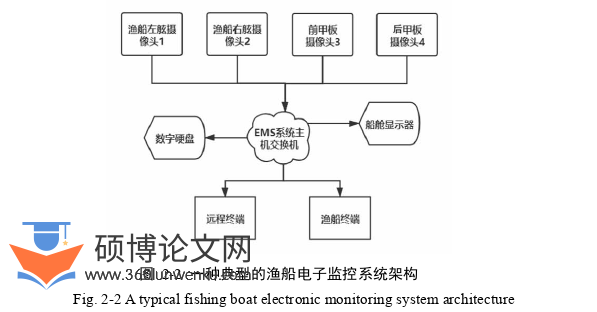
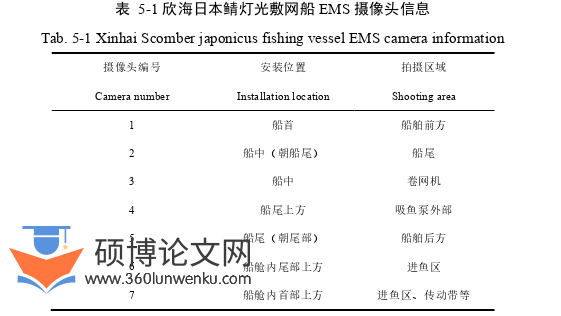
本章使用到的数据均来自安装在欣海日本鲭(Scomber japonicus)灯光敷网渔船的电子监控系统,共采集EMS数据4 000 GB。欣海10艘日本鲭灯光敷网渔船都安装有相同型号的EMS,摄像头型号为海康威视DS-2CE16F5P-IT3,有效像素1 305(水平)×1 049(垂直),镜头参数6 mm,电子快门1/25 s;硬盘机型号为海康威视DS-7808HGH-F1/M,视频压缩标准H.264/SMART264,频输入8路BNC接口,支持容量最大6 TB。为了提高船舶行为识别准确率,不同渔船上EMS的各摄像头安装位置、角度保持一致。每组EMS配有7组摄像头,摄像头1安装在船首,朝船舶前方拍摄;摄像头2安装在船中,朝绞车拍摄;摄像头3安装在船中,朝船尾拍摄;摄像头4安装在船尾上方,朝吸鱼泵外部拍摄;摄像头5安装在船尾,朝船舶后方拍摄;摄像头6安装在船舱内尾部上方,朝进鱼区拍摄;摄像头7安装在船舱内首部上方,朝进鱼区、渔获传送带拍摄。各摄像头的安装位置和拍摄区域如表 5-1所示,船舶结构与摄像头安装位置示意如图 5-1所示。2、6、7号摄像头能够完全展示放网、收网、进鱼等关键行为的主要特征。本文主要用于监控和提取日本鲭灯光敷网渔船的捕捞行为,因此只使用到7组摄像头中的2、6、7三组。其中2号摄像头拍摄绞车区域,用于检测绞车状态及船舶整体状态。6号摄像头拍摄船舱内工作区域,用于监控进鱼情况。7号摄像头拍摄船舱内进仓区域,用于监控船员整理鱼箱、渔获装箱等操作,其与6号摄像头存在部分重叠区域,可相互验证。
机械论文参考
...............................
6. 总结与展望
6.1 总结
本文主要完成基于深度学习的渔船捕捞行为识别,精准的渔船捕捞行为识别能够高度还原捕捞作业过程,以强客观性完成渔船作业的监控,对规范渔业作业、渔业资源统计等具有重要的价值。目前,国内外虽然有较多的渔船捕捞行为识别研究,但是这些研究大多受限于数据等方面的约束,仅将渔船捕捞行为简单划分为2-3种行为,缺乏统一完整的方法。本文总结并提出了渔船捕捞行为识别的一般流程,即数据采集、数据处理和行为划分、模型设计与验证三个部分。并在此一般流程框架内通过3个不同的实例验证了其可行性、科学性及可推广性。无论是第三章中的金枪鱼延绳钓渔船、第四章中的中国毛虾张网渔船还是第五章中的日本鲭灯光敷网渔船,其研究都遵循该一般流程。不同的渔船采用的识别模型并非完全一致。具体的模型设计与数据的特征有关。例如,本文识别的三种渔船中,金枪鱼延绳钓渔船的作业过程相对简单,该船舶的电子监控系统仅记录了船员捞金枪鱼和捞浮球的过程。因此,可以使用成熟的目标检测模型完成渔船捕捞行为的识别。中国毛虾张网渔船电子监控系统记录的数据较为复杂,且一些捕捞行为涉及到时序信息。传统的目标检测方法已经无法满足其捕捞行为的识别。本文设计了一种3D卷积神经网络模型,用于提取中国毛虾张网渔船电子监控系统数据中的复杂时序信息。日本鲭灯光敷网渔船的捕捞过程也较为复杂,但是日本鲭灯光敷网渔船能够提供的算力较小,3D卷积的方式虽然能够提取出时序信息,但是也会耗费大量的计算资源。因此本文将日本鲭灯光敷网渔船的电子监控系统数据做横向拼接,并去除重复的空间信息,使用LSTM模块提取时序信息,完成了复杂捕捞行为的识别。
参考文献(略)