本文是一篇机械论文,本文结合深度相机D200n来进行相机标定实现目标的精准定位,经过对比发现改进后的SF-SSD算法在对目标识别的性能方面有一定的提升,能够提高机械臂抓取的效率。
第一章 绪论
1.1 研究背景和研究意义
社会的经济和科技发展正在飞速地进步,以往的人工劳动力很难满足广大人民对物质的需求,信息时代开始后,各种学科技术已经融入人们的日常生活中。而在一些劳动场所,机器人技术可以代替人工劳动力,降低安全隐患,相比人工劳动力机器人在工作上的效率更高,能够工作的时间长,为了解决人工劳动力带来的影响,许多大型的企业都采用机器人来代替主要生成劳动力。
在信息化不发达的时期,机器人技术只能先利用提前编制好了的控制程序,来使得机器人能够在一定的条件下工作,完成大型的材料搬运和抓取,汽车零件的装配,在完成这些工作时还需要人工协助。因此,人工智能技术在机器人上的集成显得更加重要了,而当今时下,计算机目标检测视觉技术和机器人运动学技术相结合,在完成对目标的精准检测后,机器人可以快速地实现对目标的抓取任务,使得机器人抓取系统具有智能化,这也是当前热点研究的方向[1]。通过深度学习算法对图像目标进行准确的识别,可以增加机器人对周围环境的泛化性,促使机器人越来越靠近人类的某些行为,能够不受环境的影响[2]。
正是因为这几年人工智能的飞速发展,深度学习算法运用于各个领域,不管是在目标识别和检测[3]方向,还是在一些图像分类[4]和目标追踪[5]等一些方向都表现出强大的优势。大量的实验表明深度学习网络可以对输入图像进行特征提取,通过不同的网络深度提取到需要的信息来用于不同的任务中。在机器人抓取任务上,运用深度学习目标检测算法来模拟人类大脑的行为[6],通过网络的学习不断提取图像的特征,与周围的环境进行交互然后准确定位目标物体的位置和种类。
由此可见,不管是企业发展生成的需求,还是计算机技术研究的技术潮流,在深度学习的基础上开展机械臂抓取的研究是能够满足社会发展和满足人们的需求的。
........................
1.2 国内外研究现状
1.2.1 机器人的抓取研究现状
1983年,一种名为3D Bin-picking技术由日本著名的FANUC公司提出,并把该技术应用于工艺机器人身上,能够使得工业机器人对工件的识别和定位的效果提高,在对工件抓取的过程中提供准确的信息[7],如图1-1所示。

机械论文怎么写
麻省理工学院(MIT)的人工智能实验室的D.Marr在研究的过程中提出了视觉理论[8]为机器视觉的发展奠定了扎实的基础。在此基础上经过不断研究,机器人视觉技术取得了空前的进步,特别是在视觉机器人定位抓取方向,美国、日本、德国等一些发达国家已经非常成熟了[9]。
2008年,FANUC在面对“成本上涨”的挑战时,以降低人力的投入和压缩成本为主,以2D摄像头为主对工件进行数据采集,运用这些数据设计了一种iR Vision视觉抓取系统,然后再给定待加工工件的准确抓取位置,在整个过程中人工参与部分少,且具有很高的柔性。
2013年,基于康耐视(Cognex)公司的精密成像技术的飞速发展,ABB公司运用这种技术使得在抓起硅晶片的项目上节约了1/4的时间,并结合Flex Picker视觉系统一同工作,能够在光伏行业实现自动化生成。
........................
第二章 深度学习目标检测算法的研究
2.1引言
在整个机械臂抓取的过程中,首要任务需要机械臂能够在第一时间内检测到目标物体并进行类别识别,对目标物体的检测速度直接影响到整个抓取过程的效率,因此,需要设计一种既满足检测速度又满足检测精度的深度学习目标检测网络。本章首先就提高目标检测速度和精度的任务展开研究。在了解卷积神经网络和经典目标检测网络的基础上,设计了一种SF-SSD目标检测算法,引入了SENet注意力机制,对SSD算法的骨干网络VGG16进行了优化,在一定程度上加快了训练的时间,减少了权重参数量,还进行了对比试验。在目标检测的过程中不仅需要快速准确地识别目标[33],还需要提取到目标图像的信息,以至于给后面的抓取操作奠定基础。相比于传统的目标检测方法环境对深度学习目标检测算法的影响更小[34][35]。
..........................
2.2 卷积神经网络介绍
2.2.1 卷积神经网络的概念
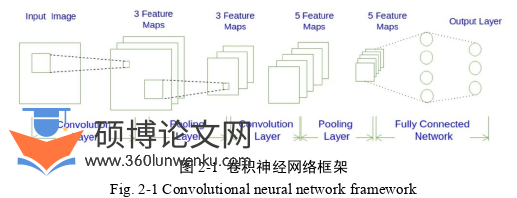
卷积神经网络跟神经网络一样能够构建多层网络,来对目标进行多层的语义分析,利用更高层的特征来表示目标的语义信息,只是卷积神经网络拥有一种卷积结构,这种卷积结构可以根据卷积核的不同大小来减少深层网络的参数量和内参占比[36],卷积神经网络整体框架图如2-1所示。
机械论文参考
卷积神经网络与神经网络不同主要由卷积层模块和池化层模块为核心,这两个模块是相互交替组成的,主要是为了提取特征。网络结构中最后的全连接层采用逻辑回归或者Softmax回归来实现输入图像进行分类的,在训练的过程中还采用了梯度下降法来寻找最小的损失,通过多次的迭代可以增加网络模型的精度。
..........................
第三章 基于D200n深度相机的标定 ................ 39
3.1 引言 ................................. 39
3.2 D200n深度相机的标定 .......................... 39
第四章 机械臂抓取系统的搭建与抓取实验研究 .................. 52
4.1 引言 ................................... 52
4.2 机械臂抓取实验平台 ........................ 52
第五章 机械臂最优时间轨迹规划 ............................... 65
5.1 引言 ......................... 65
5.2 3 -5-3 多项式插值的轨迹规划 ...................... 65
第五章 机械臂最优时间轨迹规划
5.2 3-5-3多项式插值的轨迹规划
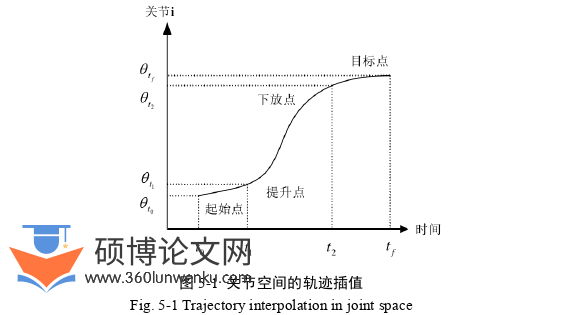
采用多项式对轨迹进行插值的作用在于使机械臂能够平稳的运动,一般在进行插值的过程中,可以对机械臂的各个关节设置4个点位(起始点→提升点→下放点→目标点),通过这4个点位完成对关节的运动轨迹规划,如图5-1所示。
机械论文参考
对于起始点与目标点来说,机械臂在这两个时刻的v和a大小值为零;而从起始点到提升点再到下放点,最后到达目标点,在这段时刻中机械臂各个关节运动的位置、速度和加速度都应该是连续的,不能出现急剧变化的情况。
本文采用的3-5-3多项式插值法,是根据3次多项式与5次多项式结合,把每个关节的运动轨迹分为3次多项式、5次多项式再到3次多项式这三个阶段。对于每个关节在插值点处的角度值,可以通过机械臂的逆运动学来求解。
...........................
第六章 总结与展望
6.1 总结
本文以深度学习SSD目标检测算法为基础,设计了一种基于深度学习的机械臂抓取系统。对传统的SSD算法进行了优化处理并加上了SENet注意力机制,对一些必备的模型训练参数进行了理论分析,结合深度相机D200n来进行相机标定实现目标的精准定位,经过对比发现改进后的SF-SSD算法在对目标识别的性能方面有一定的提升,能够提高机械臂抓取的效率。本论文主要工作归纳为以下几点:
(1)以SSD算法为基础,对SSD的骨干网络VGG16进行了优化,并在卷积层的输出后加上了SENet网络,经过对改进后的SF-SSD算法进行模型分析与验证,发现在手工标记的数据集上效果有一定的提升,能够增加模型的非线性。
(2)对D200n相机的测量原理和成像原理进行了分析,建立了成像模型,再通过相机的标定实验得到内外参数,通过坐标系的转换获取到目标物体的位姿信息。
(3)基于慧灵Z-Arm-S622六自由度协作机械臂和D200n深度相机搭建抓取实验平台,通过对机械臂的运动学建模分析来实现目标物体到机器人坐标系的映射,经过运动轨迹完成抓取任务。最后来通过抓取实验验证该抓取系统的合理性。
(4)对于机械臂在抓取的过程中可能会出现运动不平稳运动时间长的问题,本章采用了一种基于3-5-3多项式插值的轨迹规划方法,并使用粒子群算法(PSO)对时间进行了优化,经过仿真实验结果得出该方法在保证机械臂各个关节运动平稳的前提下能够有效地缩短运动时间。
参考文献(略)