本文是一篇机械论文,本文以SNR-B6型机械臂为研究对象,创建机器人在智能化车间的工作环境,探索新型的避障算法,主要对应用于工作场景下的机械臂运动规划和控制问题进行了研究,从逆运动学求解、全局运动规划算法以及控制算法三个方面进行讨论。
1 绪论
1.1课题研究的背景
制造业是一种通过将制造资源按照市场需求进行加工转化为可供人们使用和利用的大型工具、工业品与生活消费产品的行业[1]。在国家的制造业高速发展的背景下,机器人逐渐成为衡量国家创新能力和产业竞争力的重要标志。机器人在制造业中的应用不仅能够提高生产效率,还能够降低生产成本,并且为制造业创造更多的就业机会[2]。因此,通过积极引进和发展机器人技术,可以加快制造业的转型升级,提升国家的产业竞争力和经济发展水平[3]。
工业机器人在制造业中具有极为重要的地位,从2013年开始,工业机器人的主要需求逐渐向我国的消费市场转移。然而,至今为止国外品牌几乎把高端机器人市场所垄断,国产部分的竞品往往在产业链下游,通常是比较低端的产品且只有30%左右的市场份额[4]。日德企业垄断了大部分利润较高的核心产业,而我国位于产业链的中下游产业附加值低[5]。这意味着我国在工业机器人产业中存在一定的差距,需要加强技术研发和产业升级,提高国产工业机器人的竞争力。
工业4.0是当前全球工业发展的重要趋势,各国均将机器人作为实现工业4.0的关键技术之一[6]。从2013年开始,世界上大部分工业国家都纷纷出台了机器人发展战略和规划,以助力产业转型和进一步发展[7]。美国领先于其他国家在机器人技术层次,是由分析机器人的发展路线图来提高的[8]。德国通过电子与信息技术来构建“智能化”的生产系统,推进智能制造的发展[9-11]。因此,我国需要加强对工业机器人产业的研发和投入,以提高国产工业机器人的技术含量和市场占有率,同时加强产业链中游的建设,提高产业附加值。在机器人产业升级的进程中,需要充分发挥政府、产业界和学术界的作用,推动机器人产业与其他产业的深度融合,实现产业升级和转型[12]。
..................................
1.2课题研究的意义
工业机器人,也称机械臂,是机械传动结构设计、现代控制理论、机器人运动学和动力学、CAD、电子技术的集合[18]。它反映了一个国家的工业现代化程度,并被广泛应用于流水线的重复运动[19]。在工业自动化与智能化快速发展的背景下,对工业机器人的运动要求也在进一步提升。为了实现智能制造和制造业升级等目标,需要人与机器的配合,机械臂成为了一种逐渐智能化的设备[20]。
在现实的工作空间中,机械臂经常需要避开不同大小、不同形状的障碍物,因此在工作中需要避开这些障碍物,还要确保机械臂的执行轨迹的安全性[21]。智能优化算法在满足这些要求的同时,对无碰撞路径规划的路径最短、搜索时间最少等。随着执行与控制、自主学习与智能发育等技术进步,机器人将从被操纵作业模式逐渐向自主学习、自主作业方向发展[22]。新型智能化机器人可以提升工业机器人的作业精度、改善工业机器人的作业环境[23]。图1-1为双臂示教机器人。

机械论文参考
工业机器人作为制造业自动化和智能化的重要组成部分,对于提升生产效率、降低成本、改善劳动条件等方面都具有重要的意义[24]。我国的工业机器人产业在同类产品中具有价格优势和性价比较高的优势,而且自主研发和生产的核心部件丰富的经验和技术优势。然而,相对于国际先进水平,我国的大多数企业还处于小批量生产和推广应用阶段[25]。为了加强我国工业机器人产业的发展,培育发展方向[26]。为实现这一目标,需要加强技术研发,提高产业链水平,进一步推进核心部件的国产化,并加强与国外先进技术的交流与合作。同时,还需要加强政策引导和扶持,为企业提供更好的政策支持和市场环境,以推动我国工业机器人产业向更高水平发展。
............................
2 机械臂运动学分析
2.2空间描述与转换 机械臂是一种在工业生产中经常使用的机器人,其主要作用是搬运组件和工具。为了实现机械臂在三维空间中准确地执行任务,需要定义一个全局坐标系以及一些相对于全局坐标系的笛卡尔坐标系[53]。这些坐标系可以用来描述机械臂、工具和组件在空间中的位置和方向,从而帮助机械臂执行准确的动作。其中,机械臂的本身和工具也需要定义坐标系来描述其在空间中的位置和方向。在机械臂执行任务的过程中,需要通过计算机程序来控制其运动,以达到预定的位置和方向。因此,对于机械臂的控制和操作,准确的坐标系定义和位置、方向信息的获取是至关重要的。
位姿是机器人在三维空间内的位置关系,描述了机器人末端执行器在空间中的位置和姿态。在机械手的运动学分析中,位姿是非常重要的概念,因为它提供了机械手运动的完整描述。位姿通常由位置和姿态两个方面组成。为了描述机械手的位姿,需要了解机械手的运动学模型,包括关节位置矢量和姿态。关节位置矢量描述了机械手各个关节的位置,而姿态描述了机械手各个关节之间的相对方向。通过位姿描述机械手的位置关系,可以实现机械手在空间中的准确定位和姿态调整。
.......................
2.3 SNR-B6机械臂模型建立
对于SNR-B6型机械臂,本节首先介绍了其各个性能参数,包括机械臂的工作空间、最大负载、重复定位精度等。改进DH法是一种广泛应用于机器人运动学建模的方法,通过建立坐标系来描述机器人各部分的几何特性。在该方法中,每个坐标系由一个旋转关节和一个平移关节确定。确定好坐标系之后,就可以得到各个连杆坐标系相对于基坐标系的变换矩阵。这些变换矩阵可以用于描述机械臂的姿态和位置,从而为机械臂的运动学分析打下基础。通过模型和DH参数编写URDF(机器人统一描述文件)文件,将其代入MATLAB和ROS来建立其物理模型;最后利用机器人工具箱来验真末端执行器的位姿,在不同的模型的准确性。
2.3.1 SNR-B6型机械臂结构简介
本论文的研究对象为航天赛能自主研发设计的六自由度串联工业机器人。该机器人的型号为SNR-B6,最大负载为6 kg,到达距离为1440 mm,重量为150 kg。其各个关节都装有高精度减速机,重复定位精度为0.06 mm,噪音水平最高为70 分贝。
2.3.2 DH坐标系的建立
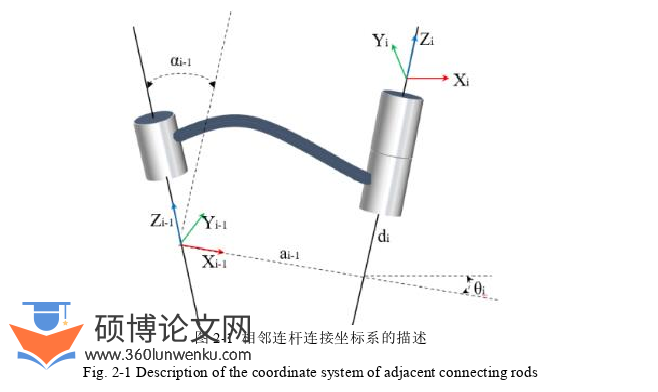
DH法是一种广泛应用于机器人运动分析中的方法[53]。与其他方法相比,DH法具有简单、易于编程和计算等优点。因此,在机器人运动学分析中,DH法被广泛应用。值得一提的是,DH法不仅适用于串联机器人,也适用于并联机器人的运动学分析。
DH法的参数包括了关节角、关节距离、连杆长度和连杆相对旋转角度[54]。如图2-1所示。根据DH法,机器人每个关节的四个参数组成的矩阵可以用于描述关节的相邻两个连杆之间的关系。
机械论文怎么写
..................................
3 基于改进 P-RRT*算法的机器人运动规划 ............................ 29
3.1 引言 ................................... 29
3.2 改进的 P-RRT*算法 ............................. 29
4 基于前馈补偿的机械臂轨迹跟踪控制 .............................. 47
4.1 引言 ............................ 47
4.2 SNRB6 机械臂的动力学分析 .................... 48
5 总结与展望................................. 63
5.1 本文工作总结 ........................... 63
5.2 未来研究展望 ............................... 64
4 基于前馈补偿的机械臂轨迹跟踪控制
4.1引言
前面第三章是关于机械臂的路径和轨迹规划问题的研究,使用了改进的P-RRT*算法,可以让机械臂在具有障碍物的工作空间中规划出一条没有任何碰撞、路径最短、搜索时间最短的平滑路径。然后利用五次多项式对得出的规划路径进行插值和曲线拟合,从而得出关节速度和加速度较为平滑的机械臂运动轨迹。但是在机械手的运动中,规划的轨迹通常是提前确定好的,然而在实际运动中,受到摩擦力、惯性力、外界干扰等因素的影响,机械手的轨迹有可能会与规划的轨迹产生误差。因此,为了保证机械手能够高精度地按照规划的轨迹进行运动,需要进行跟踪控制,以减少实际轨迹与计划轨迹之间的误差。跟踪控制的目标是实现机械手的精确控制,使其按照规划的轨迹运动,同时尽可能减少误差。在跟踪控制中,通常会根据机械手的实际运动情况对规划的轨迹进行调整,以保证机械手的运动更加准确。因此,对于需要高精度运动的机械手,跟踪控制是非常必要的。
当前,针对机械臂轨迹跟踪的需求,存在多种控制算法,如PID控制、鲁棒控制、模糊控制、迭代学习控制、滑模控制等。每种算法在不同的方面都有其独特的优势。其中,PID控制算法具有参数简单易调、应用方便等特点,因此本章节首先提出了一种基于麻雀优化算法[68]的PID控制方法。自2020年以来,该算法已经展现出良好的应用前景。为应对机械臂跟踪轨迹的误差、干扰和参数不确定性等问题,文献[69]提出了一种麻雀优化算法PID的轨迹跟踪控制器,并进行了相应的仿真对比验证。结果表明,所设计的机械臂轨迹跟踪控制器可以提高其轨迹跟踪控制精度。因此,对于需要高精度跟踪规划轨迹的机械臂,采用PID控制算法结合麻雀优化算法进行跟踪控制是一种有效的方法。
.................................
5总结与展望
5.1本文工作总结
本文以SNR-B6型机械臂为研究对象,创建机器人在智能化车间的工作环境,探索新型的避障算法,主要对应用于工作场景下的机械臂运动规划和控制问题进行了研究,从逆运动学求解、全局运动规划算法以及控制算法三个方面进行讨论。基于目标搜索策略和优化剪枝策略,优化了P-RRT*算法的局限性,基于动力学理论和前馈补偿随后,提高机器人控制算法的性能,随后利用MATLAB和Simulink仿真框架进行仿真实验,验证本文的算法以及结论。现将论文主要完成的工作总结如下:
(1)使用解析法得到了SNR-B6型机器人的全部8组逆解,并保证机械臂的运动学求解过程中准确性。此外,还通过蒙特卡洛法利用了机器人的运动学正解来求解机械臂的工作空间。因此,本文所提出的SNR-B6型机器人正逆运动学解析法为机器人运动学求解提供了有效方法,并为后续的运动控制提供了理论依据。
(2)针对机械臂的全局运动规划问题,提出了改进的P-RRT*路径规划算法以及基于线性预插值的五次多项式轨迹规划算法。该算法通过引入目标偏置、目标检测等策略加快避过障碍的搜索速度,结合了重连接进行优化剪枝优化搜索路径,同时也提高了机械臂末端执行器的平滑性,减少了对关节驱动电机的冲击。仿真实验验证了全局规划算法的优越性。
(3)基于力矩补偿的控制方式,通过克服机械臂自身重力和摩檫力,是机械臂在外力驱动下只需要克服较小的惯性即可顺应外力移动。首先选用力位控制的方式作为机械臂的控制方法,采用牛顿欧拉法进行机械臂的动力学计算,推导获得机械手在关节空间的标准动力学模型。推导出控制力矩,实现系统解耦和线性化。然后分析了传统的PID控制方法的基础上,基于麻雀优化算法来整定PID控制器的参数,实现PID控制器的参数寻优。采用动力学计算的力矩对机械臂进行的前馈的补偿,基于Solidworks和MATLAB搭建Simulinks联合仿真框架。对本文所提出的机械臂运动规划算法和关节控制算法进行仿真验证。实验数据证明了算法的有效性。
参考文献(略)