本文是一篇机械论文,本文在一种现有的基于梯度动力学的多机械臂运动规划方案的基础上,结合提出的HCF-DkW TA模型,提出一个DMCCMP方案,实现分布式多机械臂系统中的竞争型任务分配,完成竞争型轨迹跟踪。
第1章 绪论
1.1 研究背景及意义
赢者通吃(winner-take-all;WTA)是一种典型的竞争现象,能从多智能体系统之中选择出优势最大的智能体。该现象得到了广泛的研究,通常被用于描述和捕捉多智能体系统中的竞争行为[1-3]。它广泛存在于自然界和社会中,例如对于大多数植物来说,主要的中央茎在最初只比侧茎略强,但随着时间的推移,主干越来越强,最终压倒其他枝干。在社会上观察到,一旦一家公司领先,随着时间的推移,它更有可能变得越来越强大,最终在某个行业形成垄断。神经科学家发现,视觉系统中的对比度增益来自重叠神经元之间的WTA竞争。WTA的其他例子包括皮层决策,动物行为,细胞命运竞争等等。k-WTA是WTA的泛化形式,描述了多智能体系统中n个智能体通过WTA竞争选择出k个赢家的过程,其具有更广泛的应用前景。k-WTA被广泛应用于解码、聚类、分类、视觉系统、信号处理、图像处理、联想记忆、移动机器人导航等领域。由于k-WTA在许多领域都有重要的作用,许多数学模型被研究出来用以描述和求解k-WTA操作。而在近年来,递归神经网络被广泛的研究和应用于求解k-WTA操作。
递归神经网络[4]以及相关的神经动力学被认为是实时处理的强大工具,在过去的几十年里得到了大量的应用。与许多传统的迭代算法不同,递归神经网络可以在特定的并行和分布式硬件架构上实现[5,6]。这可以极大地扩大递归神经网络在各种潜在应用领域和高性能计算方面的效用。作为一种强大的计算工具,递归神经网络在求解实时优化问题方面发挥着重要作用。递归神经网络在处理时变问题时,首先将问题转化成动力学方程,再以此作为研究对象,采用负梯度下降的方法,将动力学方程的收敛误差逐渐减少,直到收敛误差达到最小值,最后计算出各个神经元的状态[7],以此得到时变问题的最优解。当收敛误差为零时,递归神经网络可以将各个神经元的状态收敛到理论解。由于递归神经网络的优越性能,在基于递归神经网络的k-WTA求解方面出现了大量的研究成果,许多不同结构复杂度的集中式k-WTA神经网络被开发出来。而在现有的研究中大多忽视了对通信结构的研究,该领域的不完善在一定程度上制约了k-WTA网络的发展,限制了其应用场景。
...............................
1.2 国内外研究现状
共识算法是一种对多智能体系统合作行为的建模方法,它通过减少系统中智能体之间的差异来更新状态,使一组动态智能体的行动达成一致。它们在许多分布式问题中得到了广泛的研究和应用[23-27]。例如Ren等人[28]采用高阶共识方法研究了一类高阶线性多智能体系统,给出了多智能体系统实现共识跟踪的充要条件,使得网络拓扑中大多数智能体的交互通信信息是可测量的。同时他们也给出了相应的共识协议。Yu等人[29]针对智能体之间缺乏互信息的问题,提出了一种分布式线性协议方法来保持共识。他们提出的方法可以在智能体之间缺乏信息的情况下实现共识。Wang等人[30]采用平均脉冲间隔和脉冲增益的方法,有效地解决了一类二阶多智能体系统中未知非线性部分的共识控制问题。Ren等人[31]从图论的角度,采用离散连续更新比较的方法,研究了拓扑交互动态变化下多个智能体的共识,并提出了多智能体系统达成共识的条件是在智能体之间的有向图中有足够的生成树。Cong等人[32]对二阶非线性多智能体系统采用自适应方法量化和控制通信信号的变化方法,初步实现了对多智能体输入和输出的定量反馈控制,有效解决了系统跟踪控制目标共识的问题。
从共识的角度实现多机械臂的协同具有易于实现、无需训练、结构简单、支持多性能指标优化等优点,因此得到了广泛的研究和应用。例如,Li等人[33]设计了一种基于博弈论视角的分布式方案,可以将机械臂的初始状态限制在期望位置。Jin等人[34]研究了一种分布式神经动力学方案,分析了多冗余机械臂系统的协同控制器。Peng等人[35]将递归神经动力学方法与共识估计器相结合,实现了多个自动驾驶车辆的分布式机动。此外,Ebel等人[36]构建了一种基于最优控制的分布式决策控制方案用于移动机器人的协同运输,该方案能保证整个系统的灵活性和稳定性。在基于合作行为建模的共识算法中,不同智能体之间的对比度随着时间的推移逐渐减小到零,例如平均共识[37]、加权平均共识[38]和最大共识[39,40]。包含上述工作在内的现有工作大多数强调了合作行为,很少考虑竞争行为。这种竞争要求对等差异的增加和对比度的增强,与共识算法存在本质上的对立。在现有的研究中,缺乏对分布式网络中动态竞争行为的研究和应用,共识算法和竞争算法的结合有待进一步的研究。
.................................
第2章 递归神经网络及其k-WTA应用
2.1 引言
二次规划是非线性规划中的一类特殊数学规划问题,在很多领域都有应用,如投资组合、约束最小二乘问题的求解、序列二次规划在非线性优化问题中应用等。在过去的几十年里,二次规划已经成为运筹学、经济数学、管理科学、系统分析和组合优化科学的基本方法。递归神经网络作为一种并行计算方法,具有很强的实时求解能力,被认为是解决动态二次规划问题的有力工具,其在大规模应用中具有优越的性能,且便于硬件实现。随着对k-WTA的深入研究,出现了一类基于二次规划的方法来解决这类问题。k-WTA操作与二次规划问题的等价转换,极大地丰富了求解k-WTA操作的工具,进而出现了许多基于神经网络的k-WTA模型。
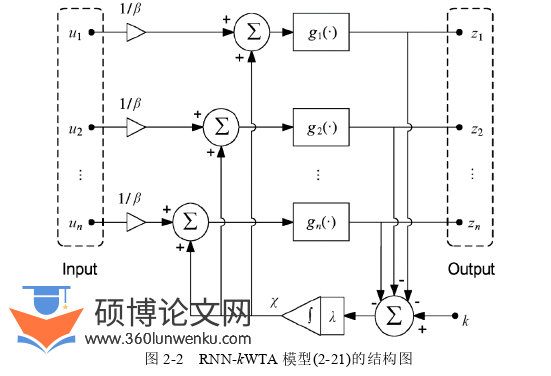
本章中,第2节介绍了一种用于动态二次规划问题求解的递归神经网络模型。第3节介绍了k-WTA操作的动态二次规划问题形式以及一种基于递归神经网络的k-WTA (recurrent neural network based k-WTA;RNN-kW TA)模型,然后分析了其结构。第4节介绍了几种其他的k-WTA模型并与RNN-k WTA模型做了简单的比较。由于性能的优秀和结构的简单,RNN-kW TA模型将成为下一章提出的分布式k-WTA网络的基础。第5节是对本章内容的简要总结。
.............................
2.2 不等式约束下的二次规划问题与递归神经网络求解
作为后续研究的基础,本节首先介绍了一种受等式和不等式约束的动态二次规划问题。之后,详细展示了基于该二次规划问题的一种递归神经网络求解方法。
机械论文怎么写
....................................
第3章 基于高通共识滤波器的分布式k-WTA模型 .......................... 17
3.1 引言 ...................................... 17
3.2 问题提出与模型设计 ........................ 17
第4章 分布式多机械臂竞争型协同运动规划 ..................... 33
4.1 引言 ........................................ 33
4.2 多机械臂运动规划方案.............................. 33
第5章 总结与展望 ............................. 49
5.1 总结 .................................. 49
5.2 展望 ............................................. 49
第4章 分布式多机械臂竞争型协同运动规划
4.1 引言
机械论文参考
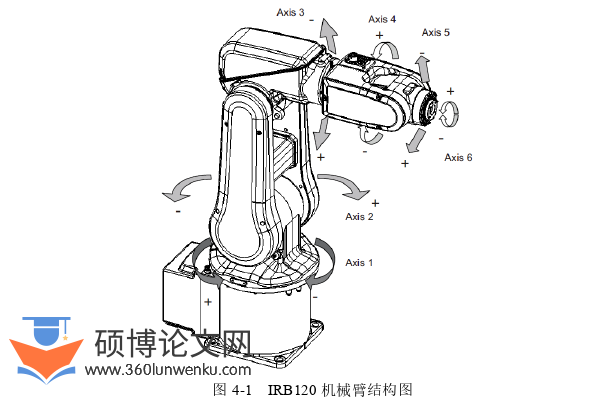
近年来,机器人以及其他智能体在科学研究和工程应用中发挥着越来越重要的作用。机械臂作为机器人的一个重要分支,在各个领域也都发挥着重要作用。机械臂操作的基本问题之一是运动学冗余度求解问题。也就是说,给定机械臂末端执行器所需的笛卡尔轨迹,需要实时生成相应的关节轨迹。与单个机械臂相比,由多个机械臂组成的系统具有更高的灵活性,可以完成更复杂的任务。而多机械臂系统合作完成复杂任务的关键就在于如何合理地进行任务分配。基于此,研究多个机械臂在执行任务时的竞争型协同是有意义的。
本章第2节介绍了一种基于梯度动力学的多机械臂运动规划方案作为研究的基础。第3节首先描述了分布式多机械臂系统下的竞争问题,然后结合上一章的HCF-DkW TA模型(3-3)提出了一种分布式多机械臂竞争型协同运动规划(distributed multi-manipulator competitive cooperative motion planning;DMCCMP)方案,并给出了理论分析。第4节进行了多台IRB120机械臂的竞争型轨迹跟踪仿真实验,验证了所提出的DMCCMP方案的有效性和实用性。第5节是对本章内容的简要总结。
.........................
第5章 总结与展望
5.1 总结
多机械臂的协同行为在近二十年来得到了广泛的研究。不同于单机械臂系统,多机械臂系统具有需求响应快、可靠性高、鲁棒性好等优点。本文针对多机械臂系统中的动态竞争问题进行了深入研究。本文首先研究了分布式网络中的动态竞争问题,在一个RNN-k WTA模型的基础上,利用高通共识滤波器协议将集中式模型中的集中求和项分布化,提出一种HCF-DkW TA模型,实现k-WTA网络在通信受限的多智能体系统中的应用。该模型能有效地解决集中式模型控制中心计算压力大、成本过高、安全风险大等问题。给出了两种数值仿真验证了其有效性,并给出了HCF-DkW TA模型与现有的LCF-Dk WTA模型的仿真对比,验证了HCF-DkW TA模型的优越性。
在多机械臂协同运动中的一个重要的问题是任务分配,要执行的任务必须在机械臂之间合理分配。本文在一种现有的基于梯度动力学的多机械臂运动规划方案的基础上,结合提出的HCF-DkW TA模型,提出一个DMCCMP方案,实现分布式多机械臂系统中的竞争型任务分配,完成竞争型轨迹跟踪。同时通过理论分析,证明了该模型的收敛性。通过模拟多个IRB120机械臂的轨迹跟踪仿真验证了所提出的方案的有效性和实用性。
参考文献(略)