本文是一篇机械论文,本文研制出了对汽车上的内外饰件涂绘阻镀漆的自动化智能生产线,把生产线上三工位平面调到同一高度,在二维平面上,机器人可涂绘在相机视野内任意位置摆放的结构较为复杂的工件。对于汽车内外饰件涂绘阻镀漆作业,国内目前还基本上靠人工涂绘与三轴工业机器人作业,此生产线符合国内中小型企业的需求,填补了国内空白。
第一章 绪论
1.1 研究背景和意义
自 20 世纪 80 年代开始,中国汽车行业逐步发展,数据显示我国汽车销量每年平均增长率超过 20%。无论是从生产量还是从汽车销售量上来说,中国汽车行业全球都处于领先位置,已成为世界汽车行业中最大的经济体[1]。随着汽车不断更新换代,对于汽车上内外装饰件的制造需求也非常大,注塑[2]完成后的饰条还需要对饰条进行电镀工序,电镀后的饰条会变硬、变脆,在与汽车上其他部件进行装配时,会发生划伤汽车上其它配件、本身饰件易断裂等问题。所以在电镀时需要把注塑件与其它部件进行装配的位置涂绘上阻镀漆进行阻镀处理[3]。本文研究对 ABS 材质的电镀工件涂绘阻镀漆,进行阻镀处理。目前国内普遍采用人工涂绘的方法和使用三轴工业机器人进行作业[4]。手工涂绘存在不美观,易发生阻镀漆污染工件表面,涂绘重复性差,阻镀漆用量浪费等缺点。由于电镀件多为空间结构件,形状复杂,曲面较多,三轴机器人很难对其进行很好的作业,且三轴工业机器人的作业一般是通过示教的方法来引导机器人进行作业[5],采用该方法时,只能对一种工件进行涂绘,且每次只能涂绘一个,效率低下。在实际操作过程中,在装夹电镀件时可能会发生偏差,这就会造成机器人实际的涂绘路径与示教的涂绘路径发生偏移和旋转,但机器人不能自动识别路径的变化,导致涂绘精度无法满足厂家要求。因此,为解决以上问题,拟通过六轴工业机器人[6]实现自动化涂绘,引入机器视觉系统,提高机器人智能化[7]水平,研制阻镀漆智能涂绘生产线。
........................
1.2 涂绘生产线的国内外发展状况
我国的涂绘生产线共经历了三次发展过程,分别是手工涂绘、生产线涂绘、自动化生产线涂绘。上世纪 50 年代,中国涂绘生产线开始萌芽,起初引进苏联的涂绘技术,继而在一些援建项目中继续发展。一般来说,是钢板焊接罐的喷涂(涂漆)生产线、钢结构的喷涂(涂漆)的生产线,但这些生产线也是靠人工来进行涂绘。如图 1.1 所示。

机械论文怎么写
自 20 世纪 60 年代,我国经济迅速发展,为适应生产发展,我国积极引进国外涂绘技术、加强与国外的涂绘技术交流,至此中国涂绘生产线开始快速发展。此后我国在生产线中使用到的工业机器人实现了生产线自动化喷涂[8]。初代工业机器人以工人示教的动作进行工业作业。在复杂的工业环境中,它的作业精度、质量以及外部的工作环境有很大的局限性。由于初代示教型机器人的局限性以及科学技术的不断发展,在二十世纪八十年代,人们开始将工业机器人与图像采集装置结合起来,具有视觉类型的工业机器人,在此诞生了具有认知和反馈能力的磁带工业机器人。安装了各种传感器的次代机器人通过这些传感器搜集到信息并发送给工业机器人,使工业机器人针对外部环境的变换具有简单的适应能力,但对于外部复杂环境的变化还存在着一定的局限性[9]。
........................
第二章 生产线系统方案设计
2.1 生产线的技术指标及设计要点
2.1.1 技术指标
本课题来源为与汽车装饰配件生产制造商的合作,该合作公司需要研发的阻镀漆智能涂绘生产线针对多种类、大批量的工件。图 2.1 为几种需要涂绘阻镀漆的电镀件。
对于涂绘电镀件的具体的技术指标如下: (1)涂绘系统运行稳定可靠; (2)漆面路径规则平面,无气泡; (3)每个电镀件的涂绘时间不超过 1min; (4)可实现曲面较复杂地方的涂绘; (5)不能对电镀件造成损失。
2.1.2 设计要点
根据厂家提供的技术指标分析出所需的自动涂绘生产线系统的设计要点: (1)只示教第一个电镀工件的涂绘轨迹,机器人即可涂绘剩余工件; (2)人工上料条件下工件装夹定位,进行夹具系统设计;(3)将托盘输送至机器人工作区,设计托盘输送系统; (4)输送托盘至工作区后进行精确定位,设计托盘定位系统; (5)可进行三工位进行涂绘作业,且三工位可以加工不同种类的电镀件; (6)因电镀件的种类多样性,工业机器人需有图像识别功能,识别电镀件的种类并能自动定位,从而处理多种类的电镀件; (7)输送线运送平稳,速度可调节,启停伺服控制;
............................
2.2 生产线的机械结构
2.2.1 整体机械结构设计
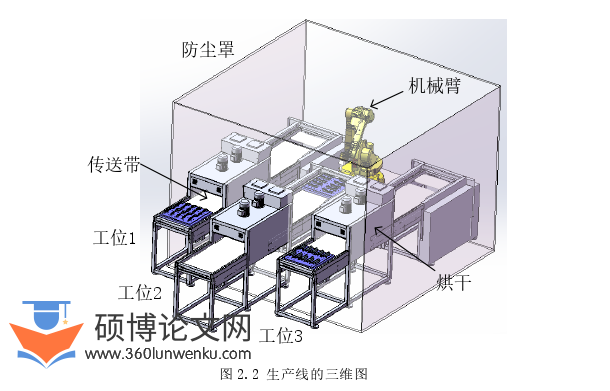
对于机械机构,生产线需要具备送料、工业相机图像识别定位、机器人涂绘工件、烤干涂绘的阻镀漆等生产功能。因此在设计整个生产线时要考虑各个部分的合理性以及稳定性,生产线的三维图 2.2 如图所示:
机械论文参考
托盘安装在送料机构上,用于承载工件卡具及工件[25]。工业相机和喷涂机构安装在机械臂的末端执行器安装面上,方便工业相机对电镀件进行拍照处理以及机械臂进行涂绘作业,送料机构用于传送待涂绘工件至涂绘工位,完成涂绘后传送到烘干工位。设计三工位来进行涂绘作业,可以提高其生产效率,且由于托盘是制式设计,托盘外观不变,内部卡具不同,每个工位可以涂绘不同类型的电镀件。
.......................
第三章 工业相机的标定与工件位姿识别 ........................................ 17
3.1 相机标定 ............................................... 17
3.1.1 相机的成像模型 ................................. 17
31.2 相机标定方法及结果 ....................... 25
第四章 机器人的手眼标定与控制编程 ............................... 36
4.1 手眼标定 ........................................... 36
4.1.1 机器人各坐标系之间的关系 ............................... 36
4.1.2 工具坐标系建立 ........................ 38
第五章 生产线系统的实验验证 ...................................... 46
5.1 生产线平台的搭建 .............................. 46
5.2 托盘调平 .................................... 46
5.3 涂绘实验 .................................... 50
第五章 生产线系统的实验验证
5.1 生产线平台的搭建
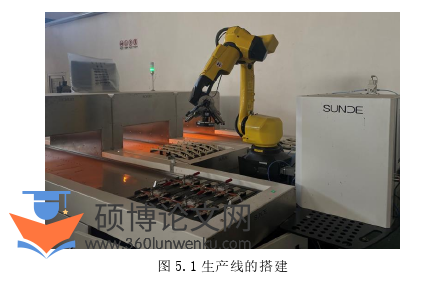
第二章根据技术指标设计了整体方案,完成了三维结构设计以及各部分硬件的选型,同时完成了软件的结构框架;第三章完成了工业相机的标定以及工件的图像识别及定位;第四章完成了工业相机与机器人的手眼标定,使其手眼协调,并且完成了各个硬件之间的通讯建立。以上只是完成理论分析、软件程序、硬件的选型和部分硬件的搭建,本章在前几章的理论基础上,完成生产线的搭建与自动化生产线的测试实验。
利用第二章所选的硬件搭建本文所涉及到的生产线平台如图 5.1 所示,其主要硬件包括 FANUC 六轴工业机器人、工业相机图像采集系统、末端执行器涂绘机构、欧姆龙 PLC、传送带、烤箱、上位机等。其中上位机与工业机器人固定在工作台上。
机械论文参考
..............................
第六章 总结与展望
6.1 全文总结
本文研究从工厂实际出发,旨在解决对汽车上的多种类型的内外装饰件喷涂阻镀漆效率低下问题。通过对涂绘生产线的背景及其现状做了深入研究,设计了符合厂家需求的整体方案。利用 FANUC 六轴工业机器人,为其开发一套机器视觉系统,完成了相机的标定、机器人与工工业相机之间的手眼标定,结合机器人的离线编程技术,编写了多种类型电镀件的涂绘轨迹与机器人的轨迹规划路径,并通过研究出合适的图像处理算法,实现了对电镀件识别与定位。调试出机器人涂绘不同工件时的出漆速度,使得漆面路径规则平整,通过对生产线上三工位二维平面的标定与图像算法,实现了机器人对电镀件在二维平面上出现偏差也能准确的涂绘,实验效果良好。经过大量的实验,生产线能够涂绘出符合厂家要求的工件,效率较高且良品率高达 99%。
本文研制出了对汽车上的内外饰件涂绘阻镀漆的自动化智能生产线,把生产线上三工位平面调到同一高度,在二维平面上,机器人可涂绘在相机视野内任意位置摆放的结构较为复杂的工件。对于汽车内外饰件涂绘阻镀漆作业,国内目前还基本上靠人工涂绘与三轴工业机器人作业,此生产线符合国内中小型企业的需求,填补了国内空白。
参考文献(略)