本文是一篇机械论文,笔者认为为了准确地从气体吸收光谱中提取气体信号并转化成气体浓度信息,提出了一种光谱信号区域基线拟合算法,首先针对信号区域基线曲率变化较大或者出现阶跃时的情况提出了GradSuck拟合算法,然后将该算法与分段二次多项式拟合进行结合,最终提出了一种具有普适性的信号区域基线拟合算法——QGS拟合算法,为准确提取气体浓度信息打下了基础。
第一章 绪论
1.1 研究背景与意义
随着科学技术的发展,有害气体已经对人们的生产和生活产生了威胁。统计数据表明,在我国的工业生产中,由气体泄漏造成的污染事件数量占主要环境事件数量的38%[1]。因此对有害气体进行实时的检测、追踪和定位是当今环境保护领域和煤炭、石油、化工等行业急需解决的重要问题之一[2-3],除此以外,气体泄漏源检测定位还可以避免或者减少地震、矿井等救灾现场二次灾难的发生。
目前基于机器人平台的有害气体泄漏源定位已有很多学者进行过研究,但现有的研究多假设泄漏源在一个理想的环境中,如风速恒定不变、无障碍物等场景等,但现实中环境复杂多变,过于理想化的研究无法很好地应对现实中的挑战。因此对于在复杂环境下泄漏源定位问题的研究具有非常重要的意义。
.........................
1.2 基于机器人平台的气体泄漏源定位的研究现状
近年来,相关学者在不同扩散气体的探测和定位方法方面做了大量的工作,取得了许多成果。通常我们根据不同方法的特点将基于机器人平台的气体泄漏源定位方法分为四类,分别是基于仿生行为的方法、基于模型分析的方法、基于嗅觉或视觉的方法和基于群体智能优化搜索算法的方法,本节将对不同的方法进行概述。
基于简单仿生行为的气体泄漏源定位方法:该方法主要包括基于气体浓度梯度的算法[4]、基于生物行为的龙虾启发式算法[5]、蚕蛾启发式算法[6]、ZigZag遍历算法[7]和Spiral算法[8]等。基于浓度梯度算法的单机器人源搜索定位问题已经得到了较好的研究,趋化和偏随机游走是两种典型的梯度算法。Chris Lytridis等人[9]提出了基于化学趋化性结合随机游走策略,针对单机器人和多机器人气体泄漏源定位进行了实验验证。结果表明,该算法不仅具有良好的搜索定位效果,而且多机器人搜索策略提高了搜索的效率和鲁棒性。但由于这种方法是根据气体浓度梯度信息来指导机器人行动,一旦环境存在气体湍流、障碍物阻隔等不可控因素,其定位准确性将会受到干扰,所以该方法抗干扰性较差。而ZigZ ag遍历算法与Spiral算法的随机性较大,且当环境复杂度高时易受环境制约,其环境适应能力较差。
基于模型分析的方法:该方法通常是基于风场或羽流模型分析,估计和预测气体泄漏源的位置和扩散路径。Marques[10]等人提出了一种基于去中心化边界的算法,该算法使用多个机器人在未知的结构化环境中搜索气体泄漏源。在搜索过程中,每个机器人独立生成一个在线的局部拓扑图,并相互共享,建立一个全局地图。针对不同的机器人数量和不同的场景,分别在仿真和真实环境中进行了测试,验证了算法的有效性。Thomas[11]等人使用偏微分方程来模拟气体扩散过程,提出了稀疏性下识别偏微分方程的概率方法,仿真了气体泄漏源定位和气体泄漏源数量识别的过程,并通过实验验证了算法的有效性。基于模型分析的方法需要建立一个可靠的概率模型,通过概率模型以及机器人收集到的信息来推断泄漏源位置,但现实中环境因素复杂多变,同一场景中的模型在受到外部因素干扰如温度变化、风速、物体移动等情况下也会不适用,所以该方法也存在抗干扰性差的缺点,并且其计算过程较为复杂,占用CPU多,对于一些陈旧的硬件平台来说并不容易。
..............................
第二章 气体信号区域基线拟合算法研究
2.1 QGS基线拟合算法数学模型
2.1.1 3种经典的基线拟合算法
自适应迭代加权惩罚最小二乘(Adaptive iterative re-weighted penalized least squares, AirPLS):该算法类似于加权最小二乘和迭代重加权最小二乘,但是它要使用不同的方法来计算权重,而且增加了惩罚项来控制拟合基线的平滑性。所提出的自适应迭代加权过程的每一步都需要解决一个加权惩罚最小二乘问题,由于基线干扰因素复杂、多变,很难用模型对其进行整体描述,所以整体提取的基线精度很难得到保证,即使采用自适应迭代加权惩罚最小二乘法,由于其平滑性参数和忠于原始数据参数之间的相互制约,其基线的提取精度也并不理想,从而导致信号后续的定性和定量检测受到影响。
小波算法:小波变换的特性都是由小波基的性质决定的,现在对小波基的研究受到很大的关注。所以在实际分析时,一般是依据分析对象的波形特征来选出相对适合的小波基,所选小波基的构造要接近待分析波形的形状特征,也可以直接对信号进行改造,构造出一个新的小波基函数。
多项式拟合:多项式拟合的原理是在多项式迭代拟合过程中,不断比较调整原始光谱数据,并将调整后的光谱数据与拟合曲线上的点进行直接比较。用这种方法进行基线校正的优势在于逐渐调整多项式的系数,从而逐步接近实际的基线形状,计算出来的基线函数形式与实际基线更加的逼近。
基线拟合的目的是为了准确地提取信号,因此只要准确提取信号附近较短的一段基线即可。如果只在信号区域进行基线拟合,一方面由于拟合线段变短,利于提高拟合基线的精度;另一方面,不需要对所有数据进行处理,可以减少计算量、提高实时性。当拟合线段较短时,一般仅用二次多项式拟合即可取得较好的效果。然而当信号区域基线曲率变化较大或者出现阶跃时,即使是仅对信号区域基线进行二次多项式拟合,也难以取得较好的结果,因此本文首先针对信号区域基线曲率变化较大或者出现阶跃时的情况提出了GradSuck(Gradual Suction)拟合算法,然后将该算法与分段二次多项式拟合进行结合,最终提出了一种具有普适性的信号区域基线拟合算法(Quadratic polynomial fuse Gradual Suction,QGS)。
..............................
2.2 GradSuck算法有效性分析
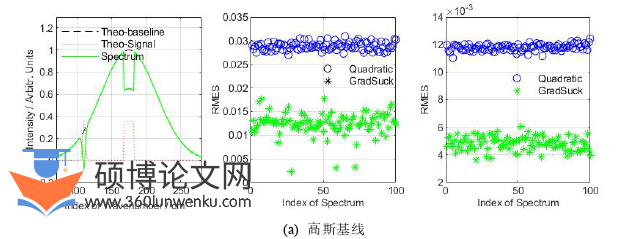
为了分析所提算法在不同曲率下的性能,分别在5种典型基线:Gauss(高斯函数)、Exponential(指数函数)、sin(正弦函数)、Triangle(三角函数)、Step(阶跃函数)的不同位置上添加两个信号产生仿真光谱。
首先,在有噪声情况下将GradSuck拟合与二次多项式拟合结果进行比较,对GradSuck算法的有效性进行验证;其次,分别针对无噪声或有噪声两种情况分析QGS算法的性能,并将QGS算法与其他算法在不同基线畸变类型、不同曲率下的基线拟合效果进行对比,分析QGS算法的准确性和稳定性;然后,选择不同的信噪比,研究QGS算法与其他拟合算法的拟合结果,分析信噪比对于QGS算法的影响;最后,使用实测光谱数据验证QGS算法的有效性。
机械论文怎么写
.........................
第三章 智能优化算法CEOA的提出.............................23
3.1 经典优化算法研究及分析............................23
3.1.1 4种类型的经典代表性算法.......................23
3.1.2 智能优化算法本质原理.................................24
第四章 CEOA算法性能实验...............................39
4.1 基于经典测试函数的CEOA性能测试............................39
4.1.1 开发能力评估.........................................40
4.1.2 勘探能力评估.........................................40
第五章 基于CEOA的泄漏源定位算法研究................................54
5.1 MATLAB仿真平台搭建..........................................54
5.1.1 气体泄漏扩散模型.....................................54
5.1.2 扩散模拟.............................................56
第五章 基于CEOA的泄漏源定位算法研究
5.1 Matlab仿真平台搭建
5.1.1 气体泄漏扩散模型
泄漏气体扩散数据的获取主要包括现场试验、风洞试验和流体力学计算模拟。由于气体扩散数据的获取不是本文研究重点,因此本文使用较简单的平流扩散方程(Advection Diffusion Equation,ADE)[78]模拟气体泄漏。ADE属于二阶偏微分方程,常用于油气开发、流体力学、环境工程、电子信息科学等领域。它用来描述各种自然现象,如气体扩散、热传导、污染物扩散等。这个方程包括两个过程:平流和扩散。平流包括化学物质在气体中的传递,扩散是指气体从高浓度区向低浓度区迁移。ADE常用的数值计算方法有:有限体积法(FVM)、有限差分法(FDM)、有限元法(FEM)等[79],本研究利用有限差分法(FDM)对方程进行数值计算。

机械论文参考
..............................
第六章 总结与展望
6.1 总结
随着科学技术的发展,有害气体已经对人们的生产和生活产生了威胁。目前关于有害气体泄漏源定位的研究也较多,在实际工业生产中大多使用传感器网络监测技术来实时监测有害气体,但这种方法存在一定的局限性,只能被动的监测,当泄漏到一定程度才能被监测到,且由于环境复杂多变,影响因素也是多种多样,传统的监测技术已经不能满足未来的工业生产需要了,而基于智能优化算法的多机器人协作跟踪定位方法可以灵活且精确地对泄漏源进行定位,不易受到外部环境的影响,在复杂环境中也有很稳定的表现。 本文首先为提高气体信号提取的准确性,提出了一种气体信号区域基线拟合算法,为后续在真实环境中定位泄漏源提取气体浓度奠定基础;其次对智能优化算法进行了调研与总结,提出了一种新颖的群体智能优化算法,并将算法应用到泄漏源定位中,并制定了多机器人的移动策略,为多机器人协作泄漏源定位提供可行方向。
1)为了准确地从气体吸收光谱中提取气体信号并转化成气体浓度信息,提出了一种光谱信号区域基线拟合算法,首先针对信号区域基线曲率变化较大或者出现阶跃时的情况提出了GradSuck拟合算法,然后将该算法与分段二次多项式拟合进行结合,最终提出了一种具有普适性的信号区域基线拟合算法——QGS拟合算法,为准确提取气体浓度信息打下了基础。
2)为开发多机器人协作泄漏源定位算法,分析比较了多种定位方法的优缺点,最后选择智能优化算法来指导机器人的行为模式,总结了智能优化算法的本质,提出了一种综合考虑全局影响因素的算法——CEOA优化算法,该算法很好地平衡了开发与勘探之间的矛盾,通过不同解集来实现外部平衡,如L集对应开发能力,S集对应勘探能力,N集兼具开发和勘探能力。通过N集和设置各组不同的更新步骤来实现内部平衡。通过N集在不同情况下转换不同的搜索策略来实现转换平衡。将CEOA与经典以及新颖的算法进行了各种对比实验,结果表明CEOA算法是一种有效且可靠的算法。
参考文献(略)