本文是一篇机械论文,笔者分析了喷涂机械臂轨迹规划研究的现状,目前国内外对喷涂轨迹设计方面多有研究,但是在汽车保险杆的喷涂轨迹规划及实际工业应用探索尚缺,本文在此基础上展开研究。
第一章 绪论
1.1 课题来源及研究目的
1.1.1 课题来源
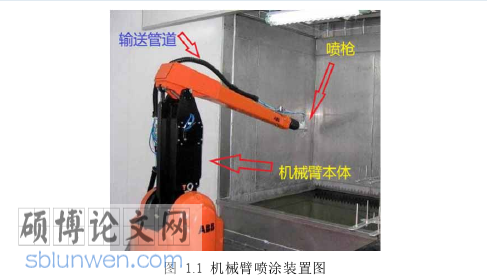
我国进行改革开放使经济建设快速高效的发展,人们生活质量在稳步提升,私家车保有量也随着条件的改善而增长。因疫情影响,汽车各季度销售量有所下降,汽车销售市场进入短暂萧条的季节。但目前汽车市场已经出现回暖的迹象,各项销售数据表明汽车销量同比已经开始增长[1]。有学者预测今年发展情况,认为汽车市场的冬天将会很快过去。据估算统计,我国保有汽车量已达 2.7 亿。宏观经济形势向好,消费回升,将会促进汽车销量有序增长。同时,汽车市场巨大,年产量又开始递增,汽车零部件的生产必然也随之递增。汽车的生产离不开涂装行业,汽车涂装行业应运蓬勃发展。喷涂机械臂装置如下图 1.1 所示,其中,喷涂机械臂装置包括: (1)机械臂本体部分,主要功能是进行喷涂运动控制;(2)喷枪,悬挂于机械臂末端关节处,是一种对漆料进行雾化处理的装置;(3)输送管道,主要是对漆料和气压进行输送功能。
机械论文怎么写
随着国家“机器换人”工程计划的实施得到了持续和深入[2],越来越多的汽车生产厂家和制造企业已经开始在自己的涂装生产线上,都会选择采用先进的喷涂机械臂技术对工件进行喷涂操作,而且这些喷涂机械臂也凭借喷漆均匀稳、灵活性强、可在有害环境中稳定工作等优势而深受广大汽车涂装企业的欢迎。涂层对汽车具有保护性和装饰性作用,熟练掌握涂装操作要点、控制影响涂装质量的各种因素,提高涂装稳定性,从而获得满足工艺生产的优良涂装工件,这形成了在汽车涂装行业使用机械臂喷涂的必然的趋势[3-5]。
..........................
1.2 国内外发展现状
据上年年底全球机器人发展调研报告显示,机械臂销售量在逐年增长,实际在企业工作的已达 280 万台。我国机械臂数量在全球中占比约为 21%,约达到 50 万台,增长势头居高不下[21-22]。
喷涂机器人轨迹规划需要结合具体实际应用,选择适合项目的优化目标和约束条件,分析喷涂工件曲直情况,建立并求解轨迹优化模型。国内外针对喷涂轨迹设计研究上,在确保机械臂运动区域在规定范围内,各关节运动力矩、旋转角度和速度不超出机器人说明使用范围,保证机器人可以正常使用的情况下,趋于以运动时间最短、机器人耗能方向进行研究[23]。为满足喷涂作业要求的需要,达到节能环保省成本的成产目标,国内外对被喷涂工件的建模及分析、喷涂轨迹规划算法的提出以及关于机械臂运动控制方面都积极开展深入的学习研究[24-25],这也是目前关注焦点。
1.2.1 国外发展现状
上世纪 90 年代,W.Persoons 等人通过使用高斯分布构建解决一定范围内平面涂层速率的模型。J.K.Antonio 等人结合柯西分布设计喷枪模型来优化喷涂轨迹。20 世纪初,Cho 等人通过设定机械臂运行时间最优的目标基础上,通过对机械臂力矩和冲力之间的约束对喷涂机械臂进行研究。2005 年,John 在前人的基础上对机械臂运动学逆运算,提出了在机械臂中使用数值迭代法、结式消元等方法机械臂轨迹规划[26-29]。
Younes Al 等人针对未知环境下自动巡航机器人运行轨迹进行研究。其提出一种能依据周围实际自动设计路径最优的路径规划器,该路径规划器结合图像处理系统,对复杂 3D 环境能进行实时计算,能在无 GPS 等定位辅助的导航的情况下对自主车辆设计最优运行路径。文中害还提出一种称为非线性模型预测视界的轨迹规划研究方法,通过使用植物动力学模型,加上反馈线性化控制律,以生成可行、最优、平滑和无碰撞的路径,同时考虑车辆动力学,支持动态障碍物并实时运行。该设计增加了用于全局路径规划、动态障碍映射和避障的计算效率算法。总体设计在几次模拟和未探测 GPS 拒绝环境中的初步真实飞行测试中进行了测试,证明其能力并评估其性能[30]。
..............................
第二章 涂装系统总体布局
2.1 喷涂系统
汽车涂装行业一方面对水性漆的要求逐步提高,另一方面对涂装系统也要求整改,添加更多环保因素。本文是在静电无尘车间进行喷涂作业,主要应用水性漆作为喷涂漆料。涂装系统内部能处理油漆稀释剂挥发时产生的有毒气体,同时可以回收废弃油漆,有相关规格的污水处理系统,机器人在无尘作业车间实现在复杂曲面自动化作业[55]。本章节通过对喷涂系统的描述,阐述了本文所使用的喷涂生产系统结构部分。结合喷涂工艺、机械臂喷涂方式选择,为后续喷涂自动轨迹系统搭建做铺垫。
涂装过程是使用气压经喷枪使油漆雾化,涂装到工件表面,以达到工件防腐、延长使用寿命、装饰美观和特殊表示的作用。喷涂作业应用范围广泛,特别是在汽车领域。但在喷涂过程中,油漆雾化后产生的挥发性漆雾对环境和人体都有可能产生危害。在部分使用人工进行喷涂的作业现场环境处理不到位,易引起粉尘附着在工件表面而产生颗粒。且人工喷涂会造成漆膜厚度出现不均匀情况,同时也会造成漆料的浪费。机器人喷涂可以代替人工在密闭无尘车间里喷涂,可以有效控制有害气体外泄、处理有害油漆溶剂、回收残余油漆,代替人在高危工种工作,达到保护人体的健康和环境保护的目的[56]。
2.1.1 喷涂系统概况
喷涂系统主要由五部分组成,分别是:
(1)机器人装置部分
喷涂机器人装置包括机器臂部分和机械臂末端悬挂的喷枪部分组成。本文采用工业六自由度 IRB5400 型号喷涂机械臂为轨迹规划研究目标,而其末端悬挂的喷枪是气枪或者旋杯中的一种,依据喷涂工艺进行旋转;
(2)控制站部分
包括控制机器人运动、输送带控制、涂料供给以及污水处理水帘运行等功能;
(3)涂料室
涂料室分为底漆供应室、色漆供应室和清漆供应室,对应喷涂需要物料供应;
(4)工件部分
包括输送带、雪橇和工件部分;
.............................
2.2 喷涂方式
本文进行轨迹规划,所使用的喷涂方式有两种,包括气枪控制喷涂和旋杯静电喷涂。(1)气枪空气喷涂即是通过气压泵装置压缩空气,油漆在高压空气的作用下,在气枪喷嘴处进行漆料雾化。(2)静电喷涂技术时在高转速旋杯雾化漆料时,漆料在高压直电场的作用下荷负电,工件接地荷正电,依据静电吸引原理,雾化后的漆料便覆盖到工件表面,实现喷涂的效果。
2.2.1 气枪空气喷涂
使用空气喷涂时,涂料雾化不充分,气压喷漆过快,而涂层覆盖率却往往只有 30 %至 50 %之间。漆雾喷涂到工件表面的反弹率大,上漆率低,飘落的漆雾对空气污染严重,造成泄露会对人产生巨大危害,这是它的劣势。但气枪质量轻小,在工作过程中不会产生热量,可以超长时间进行工作,对涂料性能无要求,使用成本和后期维护成本都低,安全系数高,所以本文使用机器人在底漆喷涂时,使用空气喷涂方式。底漆空气喷涂系统如图 2.10 所示。其中,气压源提供喷涂所需要的气压,(1)通过雾化器,连接气枪,可以实现喷漆面调节作用;(2)通过三通电磁阀连接喷漆,可以对喷漆量进行调整;(3)连接漆料源部分,起到输送漆料作用。
在人工喷涂中因其低廉的人工成本、设备成本,所以往往都是空气喷涂居多。空气喷涂能使被涂工件表面形成优良性漆膜,且色泽度好,涂装效率高。但对漆料的损耗大,浪费高,其对油漆黏度和压力有一定的要求。
2.2.2 静电喷涂
静电喷涂是一种目前应用比较广泛的技术。利用电荷间的特性,同性相斥,异性相吸的原理,结合机械臂喷涂实际使用环境安全性和实用性而设计成的一种新型涂漆方法。在喷涂车间中,旋杯在直流高压电场的作用下,高速旋转快速打散漆料,使要喷出的漆料在旋杯口出雾化得更细并带正电荷。接着,在漆雾与带异种电荷的工件在静电作用下产生的吸引力。进而漆雾在脱离快速旋转旋杯口后,到达空气中,最后均匀涂覆到工件表面形成理想状态的漆膜厚度,完成一道喷涂漆料的工序。
.............................
第三章 机械臂柔顺控制分析及建模...................... 25
3.1 控制原理.................................... 25
3.2 力/位混合控制................................. 26
第四章 喷涂机械臂轨迹规划控制系统....................... 40
4.1 系统架构.................................... 40
4.2 喷涂流程监控部分....................... 41
第五章 喷涂轨迹规划................................... 48
5.1 五次多项式插值法分析............................. 48
5.2 轨迹规划设计.................................. 52
第五章 喷涂轨迹规划
5.1 五次多项式插值法分析
本章节主要对某一产品保险杠喷涂轨迹规划进行分析。多项式插值函数次数的设定一般与所给定插值点约束条件数目相匹配,以使规划的路径连续且光滑,但若给定的插值点约束条件过多,容易使得多项式所拟合的曲线振荡,即发生龙格现象。在复杂曲面表面机器人关节运动约束条件多,则需要更高级多项式对喷涂轨迹进行轨迹插值[72-75]。本文在设计前对三次、五次和七次插值法进行过比较,三次插值法所得点位过于稀松,在部分凹凸表面处不能经行精细处理。七次插值法相对五次插值法点位过多,在保险杠弯曲部位计算量大,增加工作量。所以本文采取五次插值法进行轨迹规划。
多项式插值函数的路径规划是利用多项式函数来描述空间机械臂关节角变化过程,其所包含的多个系数的求解可通过路径的约束条件来确定。在起始点与目标点增加关节角加速度约束,连同上述关节角度约束和角加速度约束,使得关节路径规划在数学上为满足 6 个约束条件的函数插值问题,可采用 5 次多项式进行路径插值。
本实验单独考虑喷涂机械臂在空间中无工件等障碍工作运行。设定几个位置-时间节点模拟使用插值法要定点位置,为验证喷涂机械臂端点运动速度、加速度及机械臂关节处所受冲击随时间的变化。位置-时间节点情况如下表 5.1 所示。

机械论文参考
............................
第六章 总结和展望
6.1 总结
本文对工业机械臂在复杂工件表面喷涂轨迹设计及应用进行了研究,解决了企业在生产实际中由于喷涂轨迹规划不合理及各种环境因素引起机械臂喷涂作业时的抖动问题,并对某型号汽车前、后保险杠喷涂轨迹进行了合理地规划和设计,总结包括以下几个方面:
分析了喷涂机械臂轨迹规划研究的现状,目前国内外对喷涂轨迹设计方面多有研究,但是在汽车保险杆的喷涂轨迹规划及实际工业应用探索尚缺,本文在此基础上展开研究。文中对实际工业喷涂系统原理进行了概述,把喷涂流程进行实际分析。同时,对其气枪喷涂工艺和静电喷涂工艺进行了描述,指出了气枪涂覆率不高但轻巧、喷涂快干等优缺点,其适合在底漆单独使用、在色漆、清漆搭配旋杯使用的工艺原因分析。也点明旋杯涂覆率高、能耗大、有防静电要求等特点,其适合在喷色漆、清漆搭配气枪喷涂使用的原因。
应用力/位混合控制法分解喷涂机械臂的关节空间,使用 Simulink 仿真系统对喷涂机械臂的运动控制进行了建模分析,优化了关节控制,得到了稳定平滑的输出曲线。对关节 Axis2、Axis3 分别添加 50、100 扰动量,实验数据图像显示偏差波形在干扰后,系统进行了自我修正。再者,引入自适应控制法,并使用 MATLAB 搭建了喷涂机械臂运动仿真模型,得到其应对环境变量干扰下各轴输出曲线依旧平滑,验证了其具有较理想的自我调节能力。
参考文献(略)