本文是一篇机械论文,本文基于方向盘缝纫的现实问题,以针对方向盘皮套缝纫的双机械臂缝制装置为核心进行研究。基于机器人运动学的理论,建立了双机械臂机械装置的数学模型。在其基础上,讨论了轨迹规划方法。
1绪论
1.1研究背景及意义
随着我国现代工业朝着自动化与智能化方向的不断发展,使用自动化的设备机器替代手工操作已经逐步成为了现在纺织与缝纫行业的主流方式,其中工业缝纫机作为缝纫自动化的核心设备,在近些年的发展中,在诸如裁剪、缝合、花型缝制等操作方法的方面已有了喜人的成果,在服饰、皮革、箱包等产品的制作方面应用广泛。自动化技术是缝纫行业未来发展的重要方向,它不仅能够降低人力生产成本,减少人员耗费,还能提高制造业工作效率。这种技术不仅能在工业领域中应用,未来也可能进入到每个家庭,为改善生活和社会做出贡献。
如今的缝制设备制造企业正面临着新的挑战,传统的服装缝制行业逐渐趋于饱和。而传统的轻工业制造已经不再限制缝制技术的发展。相关企业也逐渐开拓更多的应用领域,在诸如汽车内部组件如座椅,表盘,航空航天领域等更多领域的需缝制物品的需求下,缝纫技术的应用也逐步从二维扩展到三维层面,空间缝纫技术及能够进行空间缝纫的设备机器逐渐成为缝纫行业未来的核心发展方向。
本文所研制双机械臂缝纫系统是以方向盘皮套的自动缝纫为背景。传统的缝纫机是将料子平铺在一个平面上,然后在平面的上下方进行进针收线等缝纫动作,但在一些特殊的缝制任务中,由于被缝制物品的形状特殊,无法平铺在平面上,这时就需要立体的缝制设备。立体缝制设备是是工业机械臂技术与智能缝纫设备的融合,相对于老式的平面缝纫机,其主要优势之处在于可以对三维空间的曲面进行自由缝纫、以及不同缝纫材料材与多层面料的缝合[1],能够解决平面缝纫解决不了的立体问题,同时能够做到更加精确,高效的缝纫。
..........................
1.2国内外研究现状
1.2.1缝制装置国内外研究现状
工业缝纫机的发展历史已有两百年左右[2],现今国内外缝纫机行业呈现繁荣发展态势,主要的外国公司有:日本兄弟、中国上工申贝股份有限公司控股的德国杜克普、百福、KSL等等。国内也有以标准为代表的飞跃、中捷、宝石等强有力竞争企业[3]。
73000a高速平缝机作为日本兄弟企业株式会社的核心产品,如图1.1所示,其核心控制系统采用电脑模拟仿真进行数据分析,大大提升了运行效率,而且采用直驱式方法,使得它更加稳定可靠。
机械论文怎么写
k6智能绷缝机是由浙江JACK缝纫机股份有限公司生产的,它采用步进电机控制剪线和抬压的力度,使得剪线更加精确和稳定,延长了设备的使用寿命。通过合理的速度控制设计,提高了生产效率。图1.2展示了这款机器的外观。当缝制薄弹性面料,如泳装时,机器会自动识别骨位,并利用先进的调节系统来控制抬压脚的高度,确保缝制的厚料能够顺利穿过骨位,从而加强机器的吃厚能力,并且线迹疏密一致,从而解决了吃线、堆积和断线等问题[4]。
............................
2双机械臂系统设计
2.1总体框架设计
为解决方向盘皮套的缝纫问题,本节设计了整体的双机械臂控制方案,其硬件主要包括:负责数据处理与控制指令生成的上位机及可视化界面;对上负责与上位机通讯传递数据和控制指令,对下负责通过总线与双机械臂通讯,发出控制指令与读取各轴状态的运动控制器(PLC)以及负责完成具体缝纫任务的方向盘机械臂与进针机械臂双机械臂机械系统。总设计框图如图2.1所示:
本文所设计控制系统的运行方向由正向控制与反向控制组成:
(1)正向控制,上位机利用以太网技术与运动控制器建立联系,以便对数据进行处理,并将处理后的结果转换为控制指令,运动控制器可以根据这些指令,通过总线传输的方式控制双机械臂的各个部件,从而实现相应的动作。
(2)反馈控制,运动控制器通过总线读取双机械臂各轴的运行状态与力反馈的模拟量数据,通过以太网通讯上传到上位机中进行数据处理,上位机中包含的可视化界面能够显示双机械臂各轴的状态与力传感器的读数大小。上位机处理这些数据进行正向控制。
......................
2.2硬件平台搭建
2.2.1硬件组成
双机械臂缝纫系统的主要硬件组成和作用如下:
(1)上位机:上位机主要用于与运动控制器的通讯,借助运动控制器读取各轴的运行状态,获取反馈信息并进行处理,再通过运动控制器间接控制各轴电机的运动。
(2)双机械臂机械装置:采用新瑞阳科技有限公司设计的双机械臂机械装置,如图2.2所示,整个系统由五个运动轴和四个旋转轴构成,运动轴分别为方向盘机械臂的X轴,Y轴,Z轴,以及进针机械臂的Z’轴,与负责进针动作的进针X’轴,运动轴由电机连接丝杆,丝杆行程为5mm。旋转轴分别为方向盘机械臂的俯仰F轴,旋转H轴,以及进针机械臂的水平旋转F’轴,与俯仰旋转Y/轴。在运动轴上设有用于外部限位的数字光电传感器,检查零位信号及限制运动范围。
(3)PLC控制器:采用深圳合信公司的PLC运动控制器及其模拟量输入模块作为主控制器,如图2.3,其包含10路数字量输入接口,CAN总线通讯接口,EtherCAT总线通讯接口。模拟量模块和数字量输入接口,前者负责收集力传感器的输入信息,后者则负责收集各个轴限位传感器的信息。上位机可以使用与之相关的编程软件编写信息处理与控制程序,并将它们下载到控制器中,以达到预期的控制目标。
(4)力传感器:本文使用的力传感器如图2.4所示,力传感器位于进针轴上,用于实时反馈针头与方向盘接触力的大小,在缝纫过程中需要针头与方向盘皮套之间的作用力在一定的范围之内,同时根据力反馈数据调整进针的动作。
(5)驱动电机:根据本文的控制要求。选用伺服电机组成双机械臂的各轴关节,相对于步进电机来说,伺服电机的控制精度一般较高,同时由于其一般采用闭环控制,控制的稳定与超调性能更好,不存在失步现象。如图2.5所示本文在运动轴选用浙江禾川科技的EtherCAT总线型伺服驱动器及电机,同时支持传统脉冲控制。在旋转轴选用河北新普智能的CAN总线集成伺服驱动电机。
.............................
3 双机械臂缝制装置运动学建模与分析 ................................ 19
3.1 机械臂运动学数学基础.................................... 19
3.1.1 位姿表示方法 ................................ 19
3.1.2 坐标变换方法 .................................... 21
4 双机械臂协同轨迹与姿态规划研究与仿真 .............................. 37
4.1 末端笛卡尔空间轨迹规划 ................................ 37
4.1.1 笛卡尔空间直线轨迹规划 ............................... 38
4.1.2 笛卡尔空间圆弧轨迹规划 ................................ 38
5 双机械臂协同控制系统实现与测试 ...................... 47
5.1 基于PLC的运动控制程序设计 ......................... 47
5.1.1 PLC运动控制接口程序设计 ............................ 47
5.1.2 运动控制通讯协议 .............................. 54
5双机械臂协同控制系统实现与测试
5.1基于PLC的运动控制程序设计
软件设计是一个复杂的过程,它需要将用户需求转化为可执行的代码,并将其细分为可操作的算法表示和数据结构。这个过程需要精确地定义数据结构、程序结构和流程步骤,以满足用户的需求。
PLC设计的核心是模块化,它是一种高效且基础的设计方法。通过将一个应用整体分解为若干个模块,并根据移动监控的操作要求和相应单独的设计,可以实现对每个模块的设计要求和规格说明。本设计采用梯形图语言,它是目前应用最为广泛的PLC图形编辑工具,由触点、线圈和指令三部分组成,具有直观易懂的特点,可以高效地满足数字量逻辑控制的需要。
根据第二章中的PLC运动控制器的设备选取,本程序设计选用合信公司配套的MagicWorks PLC软件进行编程,该软件可以通过EDS与xml文件导入的方式,分别导入CAN总线与EtherCAT总线设备的对应信息,从而在硬件组态中配置相应的参数。本文选用的PLC运动控制器具有CAN总线和EtherCAT总线的主站功能,因此可以在硬件组态的配置中自动实现PLC与设备之间的通讯,并可以读取和写入内存区的数据。CAN总线可以通过心跳报文的方式保持总线的连接,而EtherCAT则可以通过同步功能来确保通信的正常进行。
机械论文参考
.........................
6结论与展望
6.1结论
本文基于方向盘缝纫的现实问题,以针对方向盘皮套缝纫的双机械臂缝制装置为核心进行研究。基于机器人运动学的理论,建立了双机械臂机械装置的数学模型。在其基础上,讨论了轨迹规划方法。搭建了硬件平台,并设计了基于PLC的运动控制控制程序。本文的主要工作内容如下:
本文第二章在现实需求的基础上,设计了双机械臂缝制控制系统的总体方案,根据设备选型确定通过了CAN总线与EtherCAT总线进行设备通讯的控制手段。并在高波特率与稳定性的控制需求条件下选择了星型CAN总线结构与级联形式的EtherCAT总线结构,结合PLC运动控制器的组态功能,形成CAN与EtherCAT两种总线混合的总线结构。控制器通过混合总线与各功能设备联系到一起,构成了硬件平台。
本文第三章深入探讨了机器人学的理论,介绍了双机械臂的机械模型,并根据机械臂模型的参数的关系,使用D-H法构建了双机械臂的运动学模型,并进行了正逆两个方向的解算分析。使用Matlab中的工具箱对模型进行模拟与校验,并结合本文双机械臂装置的特点,对模型加以了优化改进,以进一步提高建模的准确度和可信度。最后介绍了一种双机械臂基坐标系标定方法,并对本文双机械臂装置进行了标定与验证,验证误差不超过1mm。采用蒙特卡洛法,利用Matlab的均匀分布函数生成随机关节变量,绘制双机械臂各自与联合的工作空间,得到的结果充分证明了布局的可行性,为后续的轨迹规划和协同动作打下了基础。
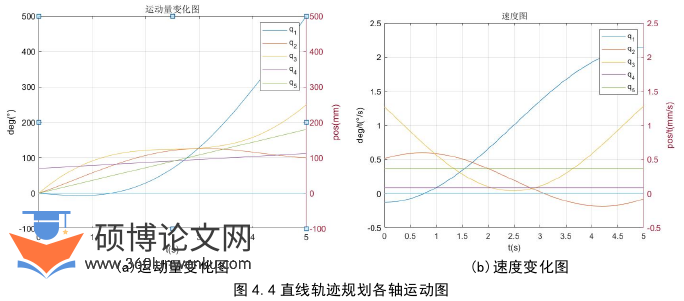
本文第四章对根据位置协同的需求,对笛卡尔空间下的轨迹规划插补方法进行了研究,阐述了空间直线轨迹与空间圆弧轨迹生成的数学原理。针对本文所需的末端姿态规划要求,使用空间姿态描述的固定角方法,设计了依附轨迹插补点的空间姿态插补方法,实现了笛卡尔空间内位置路径目标与姿态目标规划方法的结合。通过Matlab仿真,我们发现将直线和圆弧轨迹插补与姿态插补相结合,可以有效地解决双机械臂末端笛卡尔空间内的轨迹与姿态规划任务,从而获得更加准确的结果。图像表明,这种方法在实际应用中具有良好的可行性。在仿真结果中,各轴运动曲线与速度曲线连续且平滑,基本不会对设备产生较大的冲击。
参考文献(略)