本文是一篇机械论文,本文以六自由度工业机械臂为研究对象,重点研究了面向无序上料场景的工业机械臂轨迹规划、优化及应用。
1引言
1.2课题研究背景
工业制造业是我国的支柱性产业,制造业直接体现出一个国家的生产力水平。在我国人口红利不断减少以及机器换人的大背景下,我国高度重视机器人产业的发展,目前陆续出台了《中国制造2025》《关于推进机器人产业发展的指导意见》《“十四五”智能制造发展规划》《“十四五”机器人产业发展规划》《“机器人+”应用行动实施方案》等相关文件。在这些文件中明确提出我国智能制造“两步走”战略,要不断加强传统制造业智能化、数字化生产能力。与此同时,习近平总书记在2022年7月份的中央经济工作会议中强调“制造业是国家经济命脉所系,高质量发展是我国经济发展的必由之路,要提升产业基础能力和产业链水平,使产业链具备高端链接能力、自主可控能力和领先于全球市场的竞争力水平”。山西省政府相应出台《山西省电子信息制造业发展壮大2022年行动计划》《山西省“十四五”战略性新兴产业发展规划》等相关文件。力求促进省内制造业智能化、产业化、数字化发展。
工业机械臂在我国的生产制造中占据相当重要的地位,近年来,国内已经形成了全球最大的工业机械臂市场。在新冠疫情期间,工业机械臂产业依然处于快速发展中,疫情的反复坚定了制造业推动“机器换人”的决心,并形成了新的规模化市场行业增长点。目前,工业机械臂的需求依旧保持旺盛,且在生产制造等多个场景中获得广泛应用,例如:在机床上下料,码垛,集装箱搬运,自动化生产线等流程中,工业机械臂用来完成搬运作业,极大程度减轻了人类繁重的体力劳动。在焊接,喷涂等工作场景中,焊接工作环境较为恶劣,喷涂原料则含有有毒成分,使用工业机械臂代替人工来完成任务,不仅可以有效改善工人的工作环境,保护人体健康,还可以有效保证作业精度。在切割作业场景中,激光切割机器人利用自身灵活敏捷特性快速处理大规模物料加工任务,进而有效降低生产作业的综合成本。
.........................
1.3国内外研究现状
1.3.1工业机械臂研究现状
随着工业机械臂、人工智能技术的发展与应用,工业机械臂逐步成为制造业高质量发展的内在动力[2]。最初源于人力劳动无法满足生产制造的需求,机器人技术便被引进到工业之中。在制造业中作业方式单一、重复等简单工序上,传统的工业机械臂已得到广泛应用,但是在汽车零部件、3C电子、陶瓷卫浴及五金压铸等行业,还存在大量目标工件与环境都是高度非结构化的作业场景,如喷涂、抛磨、装配等自动化程度低、作业环境恶劣的工序,仍以人工结合方式进行作业[3]。
国外的工业机械臂技术研究起步较早,在20世纪60年代,美国人英格伯格和德沃尔便设计并制造出了第一台实用工业机械臂。目前国外著名的工业机械臂公司主要有德国库卡(KUKA)、瑞士(ABB)、日本发那科(FANUC)、日本安川(Yaskawa)等,这些公司的产业链最为齐全,实力也最为雄厚,占据了多数的全球市场份额。其中以柔性制造系统技术(FMS)、工厂自动化技术(FA)、计算机集成制造系统技术(CIMS)等最为先进。图1-5为日本FANUC Robot R-2000ic型工业机械臂,图1-6为德国的KUKA工业机械臂和日本的雅马哈工业机械臂。

机械论文怎么写
.....................................
2工业机械臂运动学模型分析
2.2工业机械臂结构及参数
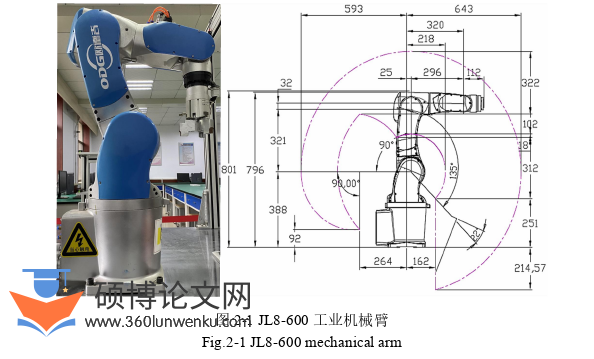
本课题研究对象为欧德吉JL8-600型六自由度工业机械臂。该型工业机械臂具有结构轻、载重比大的特点,擅长在狭窄区域内进行高精度和高速作业。工业机械臂各关节可以沿着x、y、z方向伸缩、旋转和升降。前三关节决定点的位置,后三关节则调节末端姿态。工业机械臂如下图2-1,技术参数如下表2-1所示。
机械论文参考
............................
2.3工业机械臂正向运动学分析
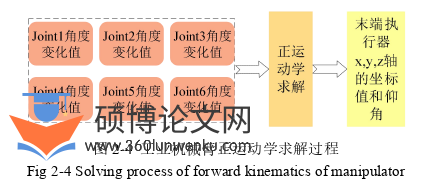
串联关节型工业机械臂正向运动学求解指的是:当工业机械臂关节角度已知时,从基座到末端执行器位姿向量的正向变换求解过程,求解过程如下图2-4所示。
机械论文怎么写
...........................
3 工业机械臂轨迹规划与仿真分析 ................ 27
3.1 引言 ............................ 27
3.2 关节空间轨迹规划方法研究 ........................... 28
4 基于改进SSA算法的工业机械臂时间-冲击最优轨迹规划 ........... 49
4.1 引言 ........................................ 49
4.2 轨迹优化问题描述 ................... 49
5 面向无序上料任务的工业机械臂抓取与轨迹规划实验 .................. 67
5.1 引言 ............................. 67
5.2 实验平台设计与搭建 .......................... 67
5面向无序上料任务的工业机械臂抓取与轨迹规划实验
5.2实验平台设计与搭建
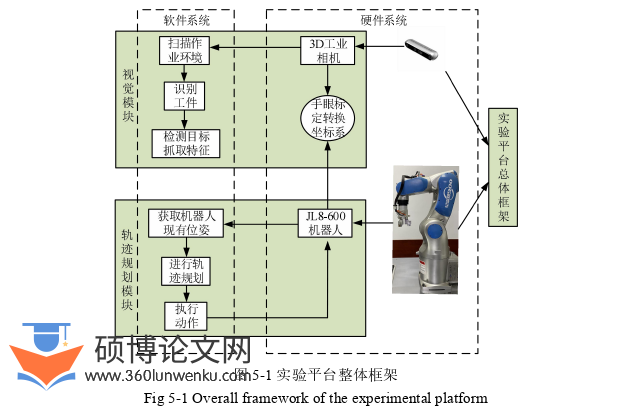
本节所设计的现实场景实验平台主要由硬件系统和软件系统两部分组成。整体构成框架如图5-1所示:
机械论文参考
硬件系统主要包括工业机械臂本体(JL8-600机器人)、上位机(PC)、3D相机(LTM-1400型)、控制柜等。3D相机负责对作业场景进行扫描,获取工件信息;JL8-600机器人则对工件进行抓取,完成作业任务;上位机负责对各硬件设备进行联通。具体实验平台硬件系统如图5-2所示。软件系统则由视觉和轨迹规划两部分组成。视觉部分负责传输图像信息,通过模板匹配算法等为机器人的抓取提供位姿信息。当目标工件位姿信息传输到轨迹规划部分时,则根据工件位姿和机器人的现有位姿,使用算法进行轨迹规划、优化,生成轨迹曲线上的点集信息,最后由控制模块驱动工业机械臂完成作业。
.........................
6总结展望
6.1总结
本文以六自由度工业机械臂为研究对象,重点研究了面向无序上料场景的工业机械臂轨迹规划、优化及应用。本文所做的工作主要如下所示:
(1)基于实验室现有的欧德吉JL8-600型工业机械臂,使用改进D-H法建立运动学模型。针对传统解析法求逆解复杂的问题,使用麻雀算法进行求解分析。最后采用CoppeliaSim软件来展示工业机械臂合理的工作空间,为下文研究打下基础。
(2)分析轨迹规划过程中常用的多项式插值函数、分段混合多项式插值函数、B样条函数、直线插补、圆弧插补算法。首先对三次,五次多项式及分段混合多项式进行仿真分析,结果表明:三次,五次多项式轨迹规划中位移与速度变换曲线均光滑、连续、无突变,但加速度变化曲线在经过中间路径点时存在突变现象,应该采用更高阶多项式插值函数或分段混合多项式来保证机械臂各关节运动曲线的连续性。然后对关节空间中五次B样条函数进行研究分析,为下文的时间-冲击最优轨迹规划打下基础。最后在笛卡尔空间进行直线插补、圆弧插补算法分析研究。针对工业机械臂在笛卡尔空间中的多轨迹规划问题,本文在路径拐点建立相邻衔接圆弧模型,采用基于S型速度曲线的改进方法规划连续多段轨迹,实现相邻轨迹平滑过渡,保证工业机械臂末端运动曲线连续无突变。
(3)使用多种策略对标准SSA算法进行改进,并采用多种测试函数对改进效果进行验证。针对多目标轨迹优化问题,本文建立时间-冲击数学模型,使用改进SSA算法对工业机械臂各关节运行时间及冲击进行综合优化,最后进行仿真实验证明改进SSA算法的有效性与实用性,既有效提高工业机械臂工作效率,又有效抑制各关节运动时所受到的冲击。
参考文献(略)