本文是一篇机械论文,本文针对主从异构遥操作系统的映射方法与控制方法展开研究,并通过在主从异构遥操作实验平台上的一系列实验为所提出的方法进行验证。实验表明本文所提出的方法能够较好应用于主从异构型遥操作系统。
1 绪论
1.1 课题研究背景及意义
随着机器人技术的研究与发展,其应用场景由最初的工业领域拓展到了其他各个领域,包括医疗领域、救援救灾、空间探测、资源勘探、社会服务等众多领域[1]。其中,对于特定的结构化环境而言,由于其低成本、高效和安全的优势,机器人技术的应用已取得了良好的经济效益和社会效益。然而,由于实际工作环境复杂,机器人难以进行高精度低时延的控制,仍存在着许多难以自主克服的问题,例如:进行精密控制、操作柔性材料、同一场景与人类合作、在未知或结构化程度较低的环境中工作。究其原因是由于机器人对环境的感知能力较弱、与环境进行交互的能力不足且机器人的智能化控制水平较低等,难以完全自主的完成作业任务,使得机器人只能执行一些简单、重复的任务。
为了提高机器人系统对复杂、未知等特殊环境下的任务适应性,遥操作系统受到了研究人员的广泛关注。遥操作源自于远程环境中执行任务的使用需求,例如太空探测[2]、水下探测[3]、手术机器人[4]、救灾[5]等由于对人类存在着风险或者人类难以到达等情况。遥操作机器人是指操作人员指导机器人运动进行作业任务,将人的智能与机器充分结合,通过人的经验知识增强机器人在操作过程中的可靠性,保证风险可控。在执行任务的过程中,操作者作为系统的一个环节,可以对作业任务进行把控,并通过视觉感知、力觉反馈等信息获悉任务的执行情况,进一步进行主观判断给出机器人下一步的控制指令。操作人员执行遥操作任务需要全身心投入,并高度集中注意力进行控制,十分耗费精神,容易导致操作人员出现精神疲劳,影响执行遥操作作业任务。这也就意味着操作人员的状况会对遥操作任务产生较大差异,操作人员的熟练度、精神状况、操作环境等对作业任务也会产生很大的影响,操作人员的主观意识会严重影响遥操作机器人的工作情况,严重可能出现操作失误导致遥操作机器人受损等情况。此外,遥操作机器人系统也可能存在着时延高[6]、透明性不足[7]、人机交互性差[8]、环境感知能力不足[9]等问题,这些问题将严重影响操作人员对遥操作机器人进行控制,难以满足任务需求。因此,如何实现对遥操作机器人的智能控制,减轻操作人员的操作难度,增强机器人对环境的感知能力,成为了遥操作机器人技术中实现良好的人机交互的关键问题。
........................
1.2 国内外研究现状
1.2.1 主从异构遥操作系统国内外研究
遥操作机器人可以辅佐人类完成难以完成的任务,是在未知或者非机构化环境中实现人机协作的有效路径[14]。遥操作系统主要分为操作人员、主端设备、从端设备、环境四个部分,通常情况下,主端设备在设计的时候会依据操作人员进行操作的便捷程度进行设计,但从端设备不同,从端设备一般为代替人类前往不同环境的机器人。考虑到不同环境带来的影响及不同的任务需求,从端设备往往会有着很大的多样性以充分发挥机器人的优势,而遥操作便是通过操作员控制主端设备来控制从端机器人,从而将人的智能与机器人的优势结合在一起,以克服特殊环境对人类的限制的同时以人类的思维远程操作从端机器人进行作业任务,保证了人类的安全,延伸了了人类的感知能力与操作能力。遥操作机器人现已广泛应用于核工业[15]、空间技术[16]、水下开发[17]、医疗康复[18]等领域,其中遥操作机器人系统拥有很多共同的特点:遥操作机器人的工作环境一般为非结构化有不确定性,遥操作任务复杂且需要依工作状态实时改变任务目标等。这些特点就对遥操作机器人产生了一些基本约束条件和要求,要求遥操作机器人需要具备良好的鲁棒性,高精度的控制效果,较好的环境感知能力,能够适应非结构化或未知的工作环境。如,对于深海勘测机器人而言,由于水分子及悬浮物质对光线存在的吸收与散射作用,导致水底能见度极低,另外深海中水压极大,十分不适合人类直接进行勘测;对于空间机器人而言,在空间站外存在日常检修、维护等工作,这使得太空员必须进入太空进行操作,而太空中几乎为真空环境,不存在氧气且温度极低,另外还存在失重与地磁场等问题,十分不利于人类进行作业;对于手术机器人而言,由于人体内部血管神经分布错综复杂,且存在很多遮挡,医生进行操作时需高度精神集中,细微的抖动也会导致手术失败,难以进行长时间、高精度、低扰动的手术。而遥操作机器人不存在上述限制,根据各自的任务需求,目前已经开发了多种遥操作机器人系统。
......................
2 主从异构型机械臂遥操作系统搭建
2.2 主从异构遥操作系统搭建
2.2.1 系统的构成
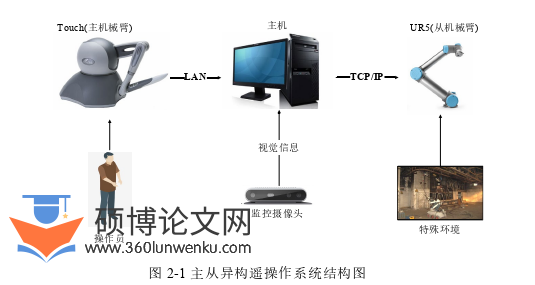
本文所搭建的主从异构机械臂遥操作系统主要包括:主端机械臂Touch设备、从端机械臂UR5、监控摄像头、网络通信设备及个人主机等。遥操作系统结构如图2-1所示,操作员通过监控摄像头获取从端机械臂与环境的位置信息,做出对作业任务的主观判断,操纵控制主端机械臂Touch,将主端机械臂的运动数据等信息传递到从端机械臂UR5,使UR5产生对应的运动,从而实现对主端机械臂Touch的位置跟踪。
机械论文怎么写
其中主端机械臂Touch有效工作范围为160×120×70mm,位置分辨率为0.055mm,从端机械臂UR5有效工作范围为850mm,重复定位精度为0.03mm。此外,通过从端机械臂末端执行器处安装优傲机器人公司的6维力觉传感器ROBOTIQ-FT300-S采集从端机械臂末端的接触力,为后续算法的实现与验证提供有效的数据支持。
............................
2.3 主从端机械臂运动学建模
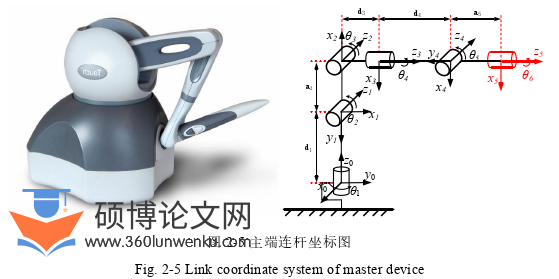
2.3.1 Touch设备正运动学
对于主端机械臂Touch设备,本文采用DH参数法对其建立数学模型。首先按照如图 2-5所示建立Touch设备的连杆坐标系。
机械论文参考
................................
3 基于边界漂移的遥操作系统工作空间映射方法 .................... 26
3.1 引言 ..................... 26
3.2 系统框架设计 ............................... 26
3.3 主从端工作空间分析 .............................. 27
4 基于深度强化学习的机械臂力反馈控制方法研究 .......................... 36
4.1 引言 .......................... 36
4.2 SAC算法 ......................... 36
4.3 基于改进SAC算法的机械臂力反馈控制算法........................... 38
5 实验验证与结果分析 ........................ 44
5.1 引言 ............................ 44
5.2 实验设计 ................................ 44
5.3 实验及结果分析 ........................... 45
5 实验验证与结果分析
5.2 实验设计
为验证所提出的方法在主从异构型遥操作系统中的可靠性,本文在第二章所搭建的实验平台上进行实验验证。实验分为两个部分,分别为:传统主从异构控制实验与改进主从异构控制实验。实验中主端机械臂均采用Touch,从端机械臂均采用UR5,从端机械臂末端力觉传感器为FT300-S。
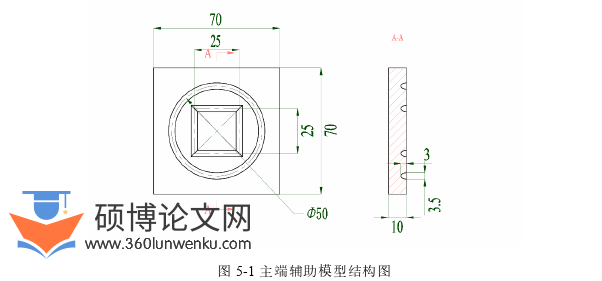
为了观察机械臂执行接触式任务中对直线与曲线的不同表现,在实验中本文以方形轨迹与圆形轨迹控制机械臂进行运动,为了使主端操作员控制更加稳定以及轨迹更利于观察,设计了一个主端辅助模型,如图 5-1所示。
机械论文参考
..................................
6 结论与展望
6.1 工作总结
遥操作系统中主从异构型遥操作系统是遥操作研究的重点方向,其中核心问题便是主从空间映射与从端控制方法,本文重点研究了主从异构遥操作系统中空间映射方法与从端机械臂智能控制方法,现将主要工作总结如下:
(1)搭建了主从异构遥操作系统硬件平台。构建了主从异构型遥操作系统的通讯结构,完成系统中数据的交互;建立了主从端机械臂UR5、Touch的数学模型,为后续相关工作的展开奠定基础。
(2)根据主从端机械臂的相应构型,提出了基于边界漂移的工作空间映射算法。分析了主从端的工作空间,并给予合适限定得到主从端的操作空间;在所搭建的主从异构型遥操作系统上进行实验验证,实验结果表明,主从端位姿跟随较好,能够满足在非结构环境下的作业任务需求。
(3)为提高从端机械臂控制的准确度、增强从端机械臂对力觉的感知,提出了基于改进SAC的机械臂控制方法。分析了传统SAC的结构,总结了SAC用于机械臂控制的优势与劣势,在状态空间中引入从端机械臂末端力觉信息,并在传统SAC算法中加入了PER方法提高传统SAC算法中样本的利用率,从而进行更有效地学习,加快算法的收敛速度。
(4)将改进SAC算法部署与主从异构遥操作实验平台,进行综合性实物实验。通过进行不同控制方法下的主从异构遥操作实验,分析对比从端轨迹与接触力的变化曲线,实验结果表明,加入改进SAC算法的主从异构遥操作控制方法能够有效改善从端机械臂执行接触式任务时接触力不稳定的情况。
参考文献(略)