本文是一篇机械论文,笔者针对现有取苗机构靠栽植臂带动秧针尖点所形成的“鹰嘴型”轨迹扎入土钵收紧,从而取出钵苗。靠栽植臂前端轨迹入土时间长,与秧箱的横向移动产生冲突,从而破坏钵苗根系;此外轨迹有突变和尖点,限制了移栽机构运转速度。
1 引言
1.1 研究目的与意义
随着世界草莓产业的不断发展,草莓销售与流通的格局也有了一些新的变化[1]。北美和欧盟是草莓的主要进口市场,但是进口量从 1980 年代的 99%以上,下降为如今的 95%左右。[2-3]发达国家也是草莓的主要出口市场,1995 年之前草莓国际市场有 90%多的份额被发达国家占据,近年来,中国等发展中国家草莓出口显著增加,已经占有草莓国际市场的 20%以上份额[4-5]。
机械论文怎么写
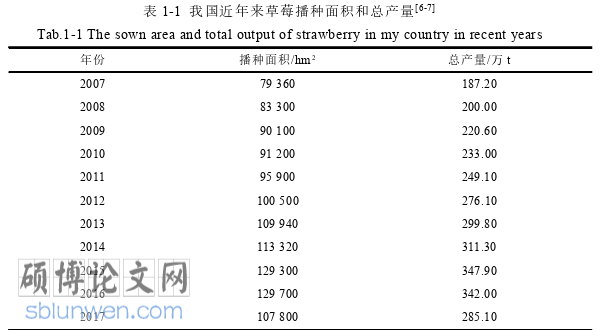
草莓在植物分类学上属于蔷薇科草莓属多年生常绿草本植物,具有口感好、营养丰富的特点[8]。草莓为无性繁殖,栽植方式为一穴一株,草莓移栽时,要注意苗心基部的高度与表土的高度平齐 [7,9]。根据 2017 年我国的瓜果播种面积和总产量统计数据显示,全国草莓种植面积达到了 10.78 万公顷,总产量已达到 285.10 万吨,总产值为五百亿人民币以上,整个行业人员也已经超过 350 万人,我国草莓近年来年产量和播种面积如表 1-1 所示,给农民带来巨大收入[10]。草莓的经济效益高于其他种类的水果,深受老百姓喜爱[11]。
..............................
1.2 国内外旱田钵苗移栽机构的研究现状
国外对移植设备的研究在 1930 年代就开始了,开发了人工喂苗的半自动移栽机。蔬菜移栽机械主要分为两类,一类是需要人工喂苗的半自动移栽机,另一种是全自动移栽机[17]。半自动移栽机都为喂入式,劳动强度大,不适宜逐渐提高的人工成本,而且效率也不高,不适合于草莓钵苗移栽[18-21]。
国外欧美等国家人均耕地面积较大,人工作业成本较高,所以移栽机朝向自动化、智能化、机电液一体化的方向发展[22]。由英国 Pearson 公司生产的一种成排顶出取苗机构[23],如图 1-1 所示,采用秧针成排扎取钵的方式进行取苗,然后将成排取出的土钵放入回转式苗杯中,再经由苗杯下方的导苗管进行移栽。与其类似的还有法拉利公司生产的成排顶出取苗机构[24-25],如图 1-2 所示。
以日韩为代表的钵苗移栽机械,如图 1-3 所示,韩国开发的杆-滑道取苗机构[26-27],依靠曲柄旋转,使从动杆绕铰接点摆动,滑块套在从动杆上,并且滑块在滑道上滑动,形成五杆机构,在运转过程中形成特定的轨迹,进行取苗,取苗效率仅为 30-40 株/分钟,但是结构简单,成本不高。
综上所述,国外全自动移栽机大多是机电液一体化的大机型移栽机,不适合我国的国情,研究一种轻简化的全自动移栽机迫在眉睫[31]。与水田移栽机相比,我国旱田移栽机械开始发展的时间较晚,其中旱地全自动移栽设备仍然在发展之中[32-33]。
................................
2 非圆齿轮行星轮系移栽机构的运动学分析
2.1 拉格朗日插值法概述
在数值分析领域中,法国十八世纪有一位数学家拉格朗日,提出了一种重要的多项式插值法,被命名为拉格朗日插值法。采用多项式函数迫近的方法,近似求出多项式函数,可以用于预测未来的气温值。常常我们了解的泰勒展开,项数越多信息就越完全,可是在 1901年,Carl Runge 在研究高阶函数时发现了一个函数:f(x)=1/(1+25x2),这个函数图像如图 2-1所示,图中红色的才是真正的函数图像,在逼近这个函数次数越多时,迫近它的函数两端波动越大,这与我们一般认为的表示一条曲线次数越多,越精确的观点是相反的,因此在不了解曲线运动情况的前提下,不要随意使用高次插值。
行星轮系移栽机构是移栽过程中的难点。秧针从秧箱上的秧盘中进行取秧,秧针插入将近 40mm 进行取秧,在夹持秧苗状态下运转一段行程之后,将土钵在之前挖好的穴口上方推出,秧针尖点形成轨迹为移栽机构实际轨迹。
移栽臂部分由凸轮 13、取钵拨叉 14、推钵拨叉 16、移栽臂壳体 19、秧针 20、推拉座板23、连杆 24、推钵板 21、推钵滑块 22、取钵滑块 26 组成。拨叉 14、16 通过销轴 15、17 固接在移栽臂壳体上。凸轮 13 与壳体用螺母固接。移栽臂壳体与行星轮轴末端的限位板通过螺母固接,限位板与行星轴 6、10 通过嵌入的方式进行固接;其中滑块 22、26 上含有弹簧座,与移栽臂壳体上的弹簧座相配合;移栽臂壳体上设有滑道,推钵滑块 22、取钵滑块 26 可在其上滑动;秧针 20 通过销钉与推拉座板 23 固接,推拉座板 23 与连杆 24 通过螺栓固接,连杆 24 与取钵滑块 26 通过嵌入的方式固接;推钵板 21 与推钵滑块 22 通过嵌入的方式固接;秧针 20 前端插入移栽臂壳体上的限位孔中,限制秧针角度的转动,如图 2-2(c)所示。行星轮系工作原理:太阳轴 8 传入动力,太阳轮固定,带动齿轮箱壳体 18 做匀速转动; 太阳轮 3 与法兰盘固连并固定不动,行星轮 1、5,中间轮 2、4 随壳体转动; 移栽臂壳体 19 随行星轴 6、10 做不等速的转动,驱动行星轴 6、10 以及限位板的不等速转动。
.................................
2.2 移栽机构运动学模型的建立
行星轮系由 5 个齿轮组成,分别为一个太阳轮,两个行星轮,两个中间轮,其中行星轮和太阳轮是全等的,而中间轮与行星轮太阳轮共轭,现对行星轮系做运动学分析,并建立行星轮系中的齿轮坐标方程,移栽臂上各个点坐标方程,以及各个齿轮的速度,角速度,角加速度的模型
机械论文参考
非圆齿轮行星轮系运动示意图如图 2-5 所示,由于一个臂是由另一个臂旋转 180°得来,故取单臂移栽机构进行分析。在移栽机构工作的过程中,太阳轮与机架固定,行星架逆时针匀速转动,其中逆时针旋转记为正,顺时针为负,在移栽机构运转的过程中,行星架逆时针绕中间轴匀速运动,当行星架转过φ时 [52-54],用φH(φ)表示行星架相对于地面的绝对转角,βn(φ)表示 n 轮的相对行星架转角,φn(φ)表示 n 轮的相对地面的绝对转角,其中 n=1,2,3,分别对应太阳轮,中间轮,行星轮。
.........................
3 草莓移栽机构优化软件的开发..............................20
3.1 优化软件设计路线......................................20
3.2 确定优化目标..................................21
4 草莓取栽一体式移栽机构结构设计............................... 36
4.1 草莓取栽一体移栽机构整体结构设计.........................................36
4.2 草莓取栽一体移栽机构核心作业部分结构设计............................37
5 草莓移栽机构虚拟样机的建立..............................44
5.1 非圆齿轮模型的建立.................................. 44
5.2 移栽部件各部件实体建模.......................46
7 样机制造与试验验证
7.1 样机制造
7.1.1 3D 打印
在众多的快速成型法中,选用 3D 打印技术[65-68]。3D 打印与传统制造相比的好处在于不用制造模具,而且有些复杂零件难以用模具成型,适合于少量零件加工,或者对于试验样机的制造,打印材料选用聚乳酸 PLA,实际机构加工材料为 45 号钢。打印的原理是:当对材料进行加热时,材料会融化,之后再根据切片软件编码输出的.gecode 文件进行逐层打印,半液半固态的材料从喷嘴中喷出,打完一层之后,再回到初始位置打印下一层,之后再进行逐层的材料累加,全部打印完之后,再去掉支撑。
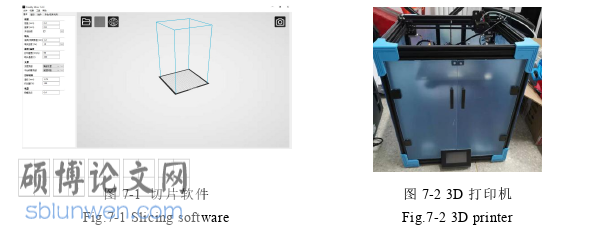
打印步骤首先在 UG 中导出.stl 格式文件,再导入到切片软件 Creality Slicer 中,如图 7-1所示为切片软件初始打开状态。设置参数:打印温度 200℃,打印平台温度 50℃,填充密度20%,如果打印密度太小,就会让零件内部是空心的,零件强度不够,如果打印密度太大,零件强度也会变小,而且打印耗时耗材,打印材料直径 1.75mm,喷嘴直径 0.4mm,打印速度 80mm/s,平台附着类型为底层网格外边加边线 20mm,支撑类型为局部线支撑,支撑临界角为 60°,3D 打印机采用创想三维 Ender6,如图 7-2 所示,可打印尺寸为 250×250×400mm。在开始打印之前进行 3D 打印机的调平处理,导入零件之后,软件之中有旋转,镜像,贴合平面等常用选项,拖动零件,零件就会跟着鼠标移动,摆放到合适的位置,让支撑在稳定的情况下最少,而且打印完成之后易于去除支撑,之后开始打印。
机械论文参考
................................
8 结论展望
8.1 结论
通过了解国内外旱田移栽机构研究现状,结合课题组现有的行星轮系进行优化改进,采用农机农艺相结合的方法进行机构的结构设计,设计了一种反转夹土取栽一体式草莓钵苗移栽机构,通过对轨迹的优化,得到一组满足取栽一体要求的轨迹参数,并根据参数进行了三维模型的设计,进行了仿真分析,验证了机构的运动学模型的可行性。
(1)在本文中,设计了一种由拉格朗日曲线所设计的非圆齿轮行星轮系取栽一体式钵苗移栽机构,可以依次完成取钵苗、运输钵苗、推钵栽植、空转准备下次取苗,提升了移栽的效率,减少了工作强度,采用反转夹土的方式完成取苗动作,采用推钵板与秧针相向运动完成栽植动作,具有推钵快速,取苗快速,减少了不等速移动秧箱的影响。
(2)利用数值分析中的拉格朗日插值法,将拉格朗日基函数用于极坐标中,得到封闭的非圆齿轮节曲线。(3)采用农机与农艺相结合的方法,首先分析了机构的工作位置和姿态,提出了用“一字形”轨迹代替原有的“鹰嘴形”型轨迹,并建立了移栽机构的数学模型,并对秧针尖点的角加速度,加速度进行了分析。
(4)根据农艺要求,设定优化目标,利用 VisualBasic6.0,开发了“探出取栽一体式草莓钵苗移栽机构优化软件”,通过调节输入参数,得到满足优化目标的轨迹,通过这种方式,得到了一组满足要求的非圆齿轮参数和结构参数。
(5)利用 UG8.0 对模型进行了三维设计,并对零件进行了装配,干涉检验。将三维模型导入到 ADAMS2017 中,进行虚拟样机的运动仿真,对仿真进行后处理,添加秧针尖点的轨迹,并对仿真结果进行分析,观察速度、加速度、位移是否满足要求,如果机构出现穿模的现象再寻找问题。对模型进行修改,最终得到秧针轨迹光滑的移栽机构模型。
(6)对模型的零部件进行 3D 打印,再进行零件的装配,装配好之后进行模型的台架试验,试验过程中,用高速摄影设备和软件辅助分析,得到实际工作秧针尖点轨迹,与仿真轨迹基本一致,得到双臂反转式探出取栽一体式行星轮系移栽机构。
参考文献(略)