本文是一篇计算机论文,本文主要研究了面向路径规划领域的群智能优化算法。首先介绍了路径规划问题的概念和发展背景,接着指出传统的路径规划算法在面对复杂问题时无法满足需求。相比之下,群智能优化算法具有简单结构、优秀适应性和操作性能的优点,成为解决路径规划问题的一种新思路。
第一章 绪论
1.1 论文研究背景及意义
经济和科技的迅猛发展,使现代社会对交通运输业的要求逐步提高。交通运输业与人类社会生活紧密相关,成为一个国家展现现代化科技水平的重要象征之一。在新的时代背景下,交通运输业呈稳步上升发展态势,使用智能机器人[1]来提高运输的效率成为当前智能物流领域的一大研究热点,其中在快递物流行业就取得了尤为突出的成就。比如:菜鸟驿站的移动机器人物流配送、京东快递的无人机物流配送,这些都是通过计算机技术和人工智能的飞速发展,才使得智能机器人的功能和技术层面得到了极大提升,成功的走进人们的日常生活中。移动机器人和无人机作为智能机器人的代表,其综合了多个领域的最新研究成果,包括电子机械和人工智能等,体现了机电一体化的最高成就。这些机器人不仅在工业领域广泛应用于各种运输任务,同时在农业、医疗、运输和军事等多个领域也得到了广泛应用[2]。在移动机器人和无人机的相关技术研究中,涉及到很多智能化研究课题,其中,路径规划技术可以说是举足轻重的一项研究领域[3]。该研究对于实现机器人自主行动至关重要。在这一领域的不断研究与探索,有助于推动移动机器人和无人机的技术水平的不断提高。
路径规划技术的宗旨是指在确定了起点和终点的前提下,选择一条路径长度尽可能短,以减少行程时间,并确保安全到达目的地,同时避开可能出现的所有障碍物的最优路线方案。近年来,路径规划运用于诸多领域,在任务的执行受到路径规划的质量影响很大。例如,对于移动机器人来说,清扫的室内卫生清洁机器人、美团外卖的智能送餐机器人,若其在执行相应的任务时,使用高效的路径规划技术,就意味着可以显著缩短工作时间,间接降低机器人的磨损程度,从而减少维修成本[4];在无人机的路径规划中,例如:无人机的物流配送、无人机的避障突防飞行[5],路径的好坏将会直接影响飞行器的安全。
............................
1.2 国内外研究现状
1.2.1 路径规划技术研究现状分析
路径规划技术自上世纪70年代提出至今,就已经与许多领域紧密相连。由于面临规划的环境的复杂多变,不确定性等因素的影响,路径规划问题实际上属于一种优化问题,其自身具有约束性、复杂性、非线性等特点。路径规划分为全局规划和局部规划两种。其中,全局路径规划需要在导航前获取整个环境的信息,然后根据这些信息规划最优路径。这种路径规划方式被称为静态路径规划,通常被用于比较固定的环境中,如百度地图的导航功能; 有别于全局路径规划问题的处理方式,局部路径规划问题侧重位置信息的时效性,需要对周围环境信息的变化进行实时记录,根据采集到的信息,对机器人移动方向做出相应的调整,最终到达目的地。如京东的自动仓库分拣。
随着科技的进步,路径规划问题成为了诸多领域的研究热点,国内外学者针对不同优化需求和使用场景提出了许多相对应版本的路径规划算法,根据处理方式的不同,将路径规划算法分为传统算法和群智能算法两种类型:
1. 传统算法
传统算法是最早的路径规划算法,主要包括人工势场法[12],迪杰斯特拉算法[13],模拟退火算法[14]。
(1)人工势场法
人工势场法是一种虚拟人工力场算法,最早由科学家Khatib在1986年提出,并被广泛应用于路径规划中。它的基本原理是通过构造引力场和排斥力场,使物体在两个力场的合力下得到一条从起始点到目标点避开所有障碍物的路径。虽然人工势场法具有实效性高、收敛速度快等特点,但是它也存在一些缺陷。其中,局部最小值是指物体受到的合力为零时停止移动,导致无法到达目标点;而目标无法到达是指,当运动物体到达某一个点时,若障碍物对物体的排斥力大于目标点的吸引力时,此时的运动物体会出现后退现象,当后退物体退到一定距离时,又会出现与之相反的情况,即当目标点的吸引力大于障碍物的排斥力时,运动物体将会前进,导致物体在运动过程中,在某个点出现反复震荡的情况,造成目标点无法达到[12]。
...........................
第二章 相关理论及分析
2.2 麻雀搜索算法
在自然界中,麻雀(Sparrow)作为日常生活中最常见的鸟类之一,活跃在人类居住的环境之中。麻雀是一种群居鸟类,其种类较多,一般来说,麻雀在外观上,羽毛呈棕色且有黑色的斑点,嘴巴短小且呈圆锥状。以被人类圈养的麻雀为例,它们喜欢在有人类的环境中生活,适应性强且分工明确。麻雀个体主要分为发现者和跟随者两种类型。发现者作为领头羊,负责寻找食物并引导整个种群的觅食方向和区域,跟随者则根据发现者提供的食物信息来寻找食物。它们采用这些行为来获取更多的食物,并且它们会根据不同的环境条件和资源分布进行调整,但是,当种群中有麻雀察觉到危险存在时会及时发出警报信息,整个种群会迅速开启反捕食行为。
麻雀搜索算法是一种紧密协作的寻优算法,觅食过程分为两种行为策略:发现者和跟随者。发现者是种群的领导者,且比其他个体拥有更加广泛的搜寻范围,其作用是引导种群中的其他个体寻找食物和提供最佳位置。跟随者为了获得高质量的食物,它们会跟随发现者,同时其中一些跟随者将会监督发现者,并与捕食率较高发现者竞争食物,以提高他们的营养。
.............................
2.3 粒子群算法
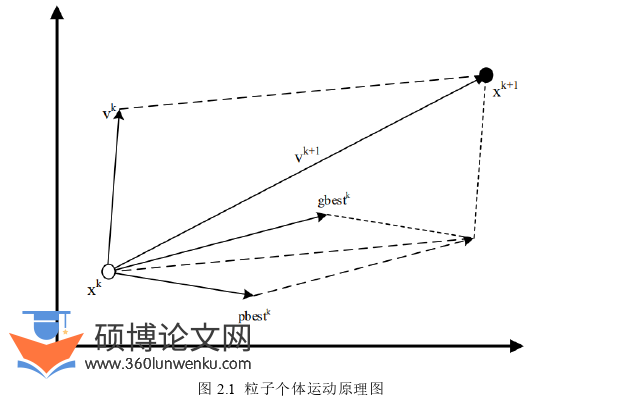
粒子群算法(PSO)是1995年由Kennedy和Eberhart提出,其灵感源于一群鸟在某个区域内寻找食物的行为。该算法将每只鸟视为一个粒子,每个粒子对应着问题的一个解,并通过目标函数确定其适应度值。所有粒子一起构成了对应优化问题的解空间。粒子群算法是一种用于寻找优化问题最优解的算法。假定在d维空间中,不同的解可以通过不同的位置来表示。在算法中,搜索空间中存在一个包含n个粒子的种群,每个粒子都存在于搜索空间的某个位置()1 2,,,,i 1,2,,ni i i idx =x x x=,即每个粒子都代表一个解方案,其优劣由适应度值来衡量,并通过适应度函数F(x)来计算。通过寻找粒子的最优位置,算法能够找到优化问题的最优解所对应的位置。
计算机论文怎么写
从公式2.4、2.5和图片2.1中可以看出,粒子个体的速度受到三个重要的因素影响:第一个因素是粒子个体先前时间点的速度,这有助于粒子个体能够对于未知区域的资源进行探索,寻找新的资源;第二个因素是粒子个体与自身历史最优位置的距离,这可以有助于粒子个体在局部最优解的附近进行搜索;第三个因素是粒子个体与群体中最优位置的距离,这可以确保粒子更好的利用群体信息,不断向全局最优解靠近。三个因素的结合使得粒子能够在探索和利用全局信息之间找到一个平衡点,以达到最优解的搜索目标。
.............................
第三章 一种融合多策略的改进麻雀搜索算法 .................. 14
3.1 引言 ................................. 14
3.2 融合多策略的改进麻雀搜索算法 ...................... 14
第四章 融合麻雀搜索的学习型矢量粒子群算法在无人机路径规划的应用 ......................... 36
4.1 引言 ........................... 36
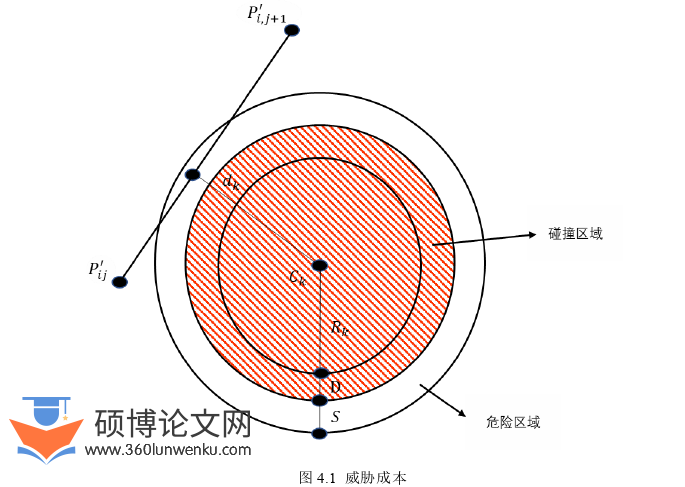
4.2 路径规划问题的描述及相关约束条件 .................... 37
第五章 总结与展望 ............................ 55
5.1 总结 ............................... 55
5.2 展望 ................................... 56
第四章 融合麻雀搜索的学习型矢量粒子群算法在无人机路径规划的应用
4.1 引言
矢量粒子群算法在面对多维连续空间优化问题,具有良好的可扩展性和搜索性能,但是跟传统群智能算法一样全局搜索能力不足,通过论述及麻雀算法的中总体结构和优势,通过麻雀算法的数学公式可以看出,麻雀算法的发现者阶段数学公式具有灵活性,具有广泛的搜索能力。所以本章通过引入麻雀算法的思想为主体来提升矢量粒子群算法的搜索性能。
在总结前人工作的基础上,为了使无人机在真实环境中能够合理地规划出安全的路线,本文提出了一种融合麻雀的学习型矢量粒子群算法(SLPSO),采用矢量分解个体的位置来控制路径中的安全性;利用精英二次反向学习策略增加种群的分布广度;再引入麻雀搜索算法的发现者阶段来更新粒子群算法的最优位置,增强种群多样性。当算法陷入停滞时,采用单维学习策略改善后续寻优手段,帮助算法跳出局部最优,平衡了算法全局性与局部性搜索的能力。通过简单地形和复杂地形两种模型的路径规划实验及Wilcoxon秩和检验可以看出,SLPSO较其他算法不论在路径的规划和收敛速度都具有更好的效果,且在复杂环境中规划的路线更加安全且稳定性较强,同时也验证了改进算法的有效性。
计算机论文参考
..................................
第五章 总结与展望
5.1 总结
本文主要研究了面向路径规划领域的群智能优化算法。首先介绍了路径规划问题的概念和发展背景,接着指出传统的路径规划算法在面对复杂问题时无法满足需求。相比之下,群智能优化算法具有简单结构、优秀适应性和操作性能的优点,成为解决路径规划问题的一种新思路。本文深入研究了麻雀搜索算法和粒子群算法在路径规划领域的应用,并对算法进行改进以提高优化能力。最后,将改进后的算法应用于不同领域的路径规划问题中,取得了不错效果。具体的研究工作包括以下几点:
(1)对麻雀搜索算法和粒子群算法的数学模型及原理进行阐述,结合算法的优势及缺陷,总结出一些对算法进行改进的思路。
(2)提出了一种融合多策略的改进麻雀搜索算法(SLSSA)。通过采用Halton序列均匀初始化种群,使得个体充分的遍布整个空间,为后续寻优做好准备;在发现者阶段引入一种非均匀变螺旋搜索策略,使得发现者的搜索方式更加细致;同时在跟随者阶段使用精英随机游走学习策略,使得跟随者的个体有着灵活的搜索范围,摆脱了盲目性。为了平衡勘探与开发能力,最后利用单纯形法策略,来避免算法陷入局部最优及提高算法的收敛速度。通过8个测试函数验证了算法的有效性;借助Wilcoxon秩和检验、Friedman检验证明了算法改进的优越性;将SLSAA算法应用于三个约束工程优化问题和移动机器人路径规划中以此证明了算法的可行性和实用性,结果表明了SLSSA算法的普适性较为出色。
(3)提出一种融合麻雀搜索的学习型矢量粒子群算法,来解决无人机在复杂地形环境中的路径规划问题,采用矢量分解个体的位置来控制路径中的安全性,从而找到合理的区域;首先通过精英二次反向学习策略增加种群的分布广度,提高初始解的质量;再引入麻雀搜索算法的发现者阶段来更新粒子群算法的最优位置,增强种群多样性,扩大搜索区域范围,使得后续寻优得到了保障。当算法陷入停滞时,采用单维学习策略改善后续寻优手段,帮助算法跳出局部最优。通过两种模型的路径规划实验及Wilcoxon秩和检验可以看出,SLPSO较其他几种算法不论在路径的规划和收敛速度都具有更好的效果,且在复杂环境中规划的路线更加安全且稳定性较强。
参考文献(略)