本文是一篇计算机论文,本文研究的折叠翼扑翼飞行器整体骨架传动机构是基于机械的四连杆结构运动的思想改进而成,然而在实际应用中发现,由于机械结构的限制,扑翼机在飞行过程无法充分发挥其高效的飞行能力。
第一章绪论
1.1课题研究的背景和意义
通过研究军舰鸟迁徙路线,发现其在低空利用热量和风力,在高空可以利用强大上升气流,实现自身能量低损耗,进行长达数月空中飞行而不落地[1]。自从莱特兄弟发明飞行器,并成功飞行,人们一直在研制可以像鸟类一样灵活,高效,可长时间续航的飞行器[2,3]。随着仿生学概念地提出,性能优越的复合材料被研制出来,科研人员再次将精力集中在仿生飞行器的研发上。目前的仿生扑翼飞行器按尺寸一般分为两种,仿鸟类扑翼飞行器和仿昆虫的微型扑翼飞行器。
当前,人们在对扑翼飞行器这一研究领域涉足较浅,要成功地将扑翼飞行器应用于实际生活,还需要克服许多的困难[4-6]。由于仿生扑翼机的多样性,隐蔽性良好的特性,其在不论是军事还是民用上都有极大的优势。譬如,在科学研究方面,可以通过仿鸟扑翼机进行非侵入式环境调查,近距离观察鸟类生活习性,对解密更多飞行奥秘,实现人类自主飞天的梦想提供理论和模型基础;在军事方面,仿昆虫式微型扑翼机,其仿生特性提供了很好的隐蔽性能,对侦察地面及建筑提供了更安全的可能性。可以预见,在不久的未来,由扑翼飞行其本身所具有的独特优势将使其成为未来新的研究热点,现在对于扑翼飞行器自主控制的研究,将具有重要的理论意义和实际应用价值[7-8]。
本文研究的仿生扑翼机,是一种仿鸟扑翼飞行器,旨在研制出一款可以像真实鸟类在空中利用自然界的风力,像自然界鸟类一样长时间地留空,实现长时间高效率地飞行。同时,目前研制出来的扑翼机不论结构还是材料制作方面与真实鸟类大相径庭,扑翼机动力来源的仿生性能不是特别明显,因此本文研究扑翼机针对其仿生性能,研制出一款更加符合自然鸟类生理特征的羽毛机翼的仿鸟扑翼机。
................................
1.2扑翼机研究现状
目前市场上大多无人机为旋翼和固定翼两种。仿生扑翼飞行器领域的研究比较稀缺。因为飞行生物扑动翅膀产生动力飞行的机理比较复杂,但人类一直对其进行研究,其中也遇到了不少麻烦。我国就有鲁班造鸟的的说法。在国外,达芬奇设计第一个带有铰接翅膀的人形挡板[9]。1874年Alphonse Penaud制作出第一台以橡皮筋驱动成功飞行的扑翼飞行器[10]。早期第一款以橡皮筋为动力的扑翼飞行器Tim Bird投放市场后,以此为模型的扑翼飞行器广泛制作并运用[11]。科研人员和业余爱好者一直在为仿生扑翼飞行器这一还未完全成熟但研究价值巨大的领域做出贡献,研制了各式各样的精巧的仿生扑翼飞行器。
1.2.1国外研究现状
国外对飞行器研究较早特别是航空工业发达的国家,他们在扑翼飞行的研究领域已经有了很深厚的积淀。许多国家,在实物制作、样机的控制系统研制以及进行一些相关的仿生实验研究上也取得了长足的进展。
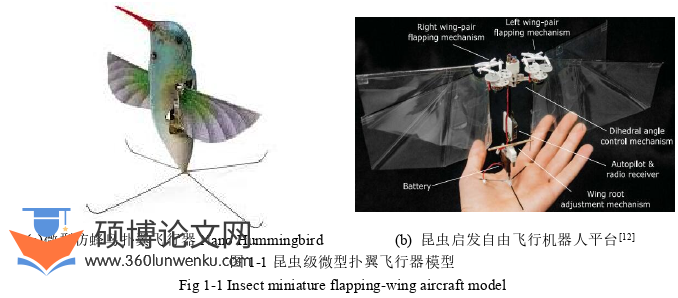
近年来,许多受飞行生物启发的仿生扑翼机器人平台被研制出来[12],昆虫级微型扑翼机有Hummingbirds[13,14],如图1-1(a)所示。2011年,美国Aero Vironment公司模仿蜂鸟高频率拍动翅膀的机理研发的微型飞行器,该飞行器重19g,翼展16.5cm,飞行速度超过6.7m/s。由于其尺寸极小,其定位是在外来战争中可用作新一代室内侦察及检测的微型无人机。可以通过遥控器对其进行控制,完成垂直起降,空中翻转等复杂动作,续航时间超过10分钟。
计算机论文怎么写
..................................
第二章折叠翼扑翼机结构设计
2.1鸟类飞行机理
鸟类的翅膀在飞行时有四种基本运动方式,分别为扑动、扭转、挥摆、弯曲折叠[53],扑动是指翅膀绕鸟的躯干方向为轴线上下转动;扭转运动是指以翅膀自身中线为轴旋转运动,这种运动方式可改变迎角;挥摆运动是指翅膀绕垂直于躯干的方向做前后挥动运动;弯曲折叠是指翅膀的外翼相对于内翼的折曲,即翅膀沿翼展方向的弯曲。
自然界中鸟类做为最具代表飞行生物特征的生物,它们在不同场合采用特定飞行技巧,改变翅膀,尾翼等躯干结构形态,已适应复杂环境,展示了高超的飞行本领,对自然界中鸟类飞行机理进行研究,可以使得人工机器鸟的研制合理化及提供理论基础。
本章节简要分析鸟类飞行机理,获取其机翼等重要飞行部位的运动情况,并根据鸟类运动模式,构建仿鸟类的折叠翼扑翼机。本文所运用的样机平台是仿照自然界中海鸥的构造进行设计的。因此对扑翼机平台进行搭建,需对体型较大鸟类飞行过程中如何通过控制自身姿态获取高升力和推力进行研究。鸟类经历数万年进化,翅膀运动模式趋于适应高飞行效率[52]。基于此,设计机器鸟的运动模型,通过模型运动方程建立及前期课题组气动仿真的理论基础,设计并制作扑翼机各模块,对实验平台进行结构设计与研制。
............................
2.2扑翼机机身结构设计
2.2.1对称平面传动结构
鸟类的拍打过程并不是单纯的上下扑动,而是在做“8”字的往复运动[55],类比划船时船桨的运动模式。但在实际机翼和骨架设计研制过程中,装配,载重,各个驱动电机的控制算法,传动装置等因素限制,本文研发的扑翼机平台翅膀运动模式采用简单的往复上下扑动模式。扑翼机两翼间扑打频率,幅度,变化相位在保持飞行器飞行稳定方面起到至关重要作用。在两翼拍打过程中,忽略环境因素的影响,受到的空气对扑翼机产生的力矩是相当等的,如果两翼扑打不对称,两翼不等的气动力矩相合产生滚转力矩,无法保持飞行姿态平稳。
实现扑翼机机翼对称扑打,具体实施传动方案如图2-4所示。两边机翼通过曲柄装在一对咬合的齿轮上,并由一个电机转动,两个大齿轮相对转动带动两边机翼的同时相对运动。
在生物学和统计学里,鸟类,昆虫等飞行生物的尺寸,翅膀扑动频率等参数会随着自身质量变化而不同,这种变化有着一种可循的规律,称之为尺度律[56]。在扑翼机的制作过程中,计算鸟类各部分参数与质量M数值关系,可以得出扑翼机初期研发的基本参数,归纳参数可以为后续开发提供一定的数值理论基础。
..................................
第三章折叠翼扑翼机数值分析.................................30
3.1数值仿真平台搭建.................................30
3.1.1计算流体力学软件XFlow.............................30
3.1.2扑翼机运动模式.....................................31
第四章折叠翼扑翼机实验验证.......................42
4.1飞行性能实验测试................................42
4.1.1阶段一:折叠翼扑翼机飞行性能测试....................42
4.1.2负重测试及数据处理........................44
第五章总结与展望....................................64
5.1本文的工作总结...........................64
5.2未来展望.......................................64
第四章折叠翼扑翼机实验验证
4.1飞行性能实验测试
外场测试是即是在真实的环境中飞行,本文进行了多次的外场测试,在外场测试中,产生许多新的现象,这是仿真和室内测试所不能取得的效果。同时,为了使实验数据更为可靠,本研究外场测试主要分为三个阶段,第一阶段,扑翼机不搭载飞控系统,测试扑翼机飞行性能;第二阶段测试扑翼机负载能力,搭载飞控系统,但不开启增稳功能;第三阶段,开启飞控增稳功能,定量测量扑翼机飞行数据。
4.1.1阶段一:折叠翼扑翼机飞行性能测试
在这一阶段的外场测试中,本文的扑翼机不携带飞行控制系统设备,单纯依靠飞手的操控对扑翼机进行控制。主要目的是测试飞行平台的飞行性能,确保飞行器提供一个在后续数据采集,自主方向控制,调整飞行姿态实验的良好飞行平台。经过多次疲劳测试,验证该扑翼机测试平台性能良好,能够顺利起飞,迅速爬升,空中转弯,高空盘旋,最终安全滑翔降落。如图4-1(a-f),在野外进行测试飞行实验,外场半径大,适合扑翼机大范围盘旋飞行,但环境更为复杂,空气中的乱流更多,对扑翼机在不稳定环境下飞行的易控性能的检验提供了极好的模拟场所。图4-2(a-f),在学校汇学堂前的飞行测试,该场地气流相对稳定,但场地半径较小,对扑翼机快速转向性能的检验,这是一个极佳的实验场地。其中,如图4-1所示的外场大半径飞行,实验条件如下:飞行半径约为150m,风速约为6m/s,扑翼机重量是581.4g,起飞扑打频率为4Hz,机翼扑打幅度约为55°,地势高低不平,周围有障碍物,落差起飞。

计算机论文参考
..................................
第五章总结与展望
5.1本文的工作总结
在近20年来,翅膀可以变形的扑翼机一直是研究的热门领域。目前研究的扑翼机以单自由度的扑翼机居多,多自由度折叠翼扑翼飞行器研制相对较少,本文正是在折叠翼扑翼机这一比较新领域的平台上,对其进行模型设计、气动特性、飞行试验和新型羽毛机翼的研究,实现扑翼机更稳定的飞行。本文具体研究如下:
(1)结构模型方面,通过分析鸟类飞行机理,翅膀和尾翼等鸟类飞行重要工具,仿照鸟类大体结构特征,对扑翼机结构进行建模,运动仿真分析,确定折叠翼扑翼飞行器整体结构方案。分析其气动特性,在三维气动仿真平台,分别对仿生扑翼飞行器的机翼初始迎角、扑动频率、来流速度以及展弦比等参数对飞行性能影响进行研究。通过建模以及仿真分析,旨在为扑翼机制作提供参考,为后续优化提供设计方案。
(2)实现折叠翼扑翼机自稳飞行。设计出可飞行折叠翼扑翼飞行器模型,并进行外场测试,在飞行过程中,面对突发状况或者自身机构原因,导致飞行姿态不平稳,加装了飞行系统,实现扑翼机稳定、长时间飞行,并最终安全降落,多次外场飞行实验,验证了本文研制的折叠翼扑翼飞行器可重复性,可靠性以及模型、气动仿真结果的科学性,达到本文预期目标.
(3)在一代扑翼飞行器的基础上,研制出一款生物混合的,以羽毛扑动产生动力的仿生扑翼机。该扑翼机机翼区别于传统扑翼机膜状结构,首次使用真实鸟类羽毛做为附着材料覆盖在机翼骨架上,并对其进行实验测试,成功飞行。这是世界上第一次以羽毛扑动产生动力带动人造飞行器成功起飞并持续飞行。
参考文献(略)