第一章 绪论
1.1 研究背景及意义
近年来随着图像处理技术的发展,我们生活中越来越多的信息被图像所代替,例如在医学的病变诊断中的断层扫描技术、超声扫描技术、核磁共振扫描技术等都是依赖于图像处理技术,这些技术的应用提高了医学检查的精准度[1];同样,在工业检测中图像处理技术应用也十分广泛,截止目前图像处理技术在纺织业的检测领域已经取代部分人工检测,涉及的范围有组织鉴别、纤维的鉴别以及纱线相关测试等[2]。
此外图像处理技术结合无人机技术的应用也取得了诸多成效。无人机凭借其灵活性、无需驾驶人员等优点,不管在我们日常生活中,还是工业生产以及军事中都扮演着越来越重要的角色。例如,无人机结合图像处理技术在测绘领域的应用已经取得显著成效,不仅加快了数据采集的速度,也解决了恶劣测绘环境可能带给工作人员的危险问题,无人机获取的测绘数据结果截止目前已经成为减灾救灾的重要参考信息[3];无人机凭借这些优点与图像处理技术相结合,在军事侦察工作中发挥着越来越重要的作用,成为战争中不可缺少的情报获取工具。
本文主要是针对宁夏盐环定扬黄工程的水利管道设施巡检智能化进行研究,通过实地调研发现,该工程水利管道设施因为长时间处在露天环境,所以会出现破损、腐蚀、被其他遮盖等问题。为加强水利设施的维护,需要每隔一段时间进行巡检。但是在巡检过程中如果采用传统的人工巡检方式,则不仅需要耗费较多的人力、物力,而且也加大了水利管理部门的经济负担和工作量。基于无人机技术的飞速发展与图像处理技术的日渐成熟,结合无人机体积小、无人化、运动灵活等优点以及图像处理的智能化,本文提出基于图像处理的无人机水利设施巡检技术,该技术主要包括以下两个方面的内容:第一是无人机不再采用传统的导航方式,而采用不同于传统图像导航方式的新型图像导航方法。传统图像导航是采用以周围标志性物体为参考,或者采集图片信息与预先存储在系统中的地图对比实现导航。而本文提出的图像导航方式是利用管道图像中管道的线性,通过图像畸变校正、滤波、图像分割、图像透视变化、偏转角计算等步骤确定无人机航向和姿态并调整飞行状态。因为盐环定扬黄工程的水利设施大多是处在偏远山区,这些地方 GPS 定位精度低且缺乏标志性建筑物,不适合采用传统的导航方式,故本设计采用图像导航方式,避免因信号精度低及其他原因导致的无人机控制问题。第二是把“树莓派”作为图像处理平台嵌入到无人机设备中,解决了传统图像处理平台不易移动和体积重量较大的缺点。综上所述,采用该设计大大降低了巡检工作人员的工作量,而且减少了水利管理部门对巡检工作的费用开支,能够更好的确保水利设施巡检的效率与准确度。与此同时,该方法也可以推广应用到电力线、道路等巡检工作中,解决相关领域的智能巡护问题。
.........................
1.2 国内外研究现状
1.2.1 图像处理的研究现状
图像是我们对新事物最直观的感受,也是我们记住并理解新事物很好的方式。1920 年图像处理技术第一次被应用在解决图片传输清晰度的问题上。从 1946 年开始,因为数字计算机的出现,使得图像处理技术有了突飞猛进的发展,尤其在图像信息的获取、存储和远距离传输等方面,相关技术与应用取得了跨越式的进步。随着人工智能时代的到来,越来越多的科研人员从事图像处理相关技术的研究。
在二十世纪中期,数字图像处理以独立学科出现。最初为满足人类更好的视觉效果需求,仅针对图像进行图像增强、复原、编码等处理。美国宇航员喷气推进实验室相关科学家在1964 年成功将图像处理技术应用在,把 “徘徊者 7 号”拍摄的近万张图片通过畸变校正、滤波、增强、复原等方法实现月球表面特征图片的重塑,相关技术在其他行星的探测过程中也发挥积极作用[5]。
随着 1972 年头部断层扫描(CT)装置的问世,图像处理也因此跨上医学疾病诊断的舞台,并在之后出现的超声扫描、全身 CT、X 射线图像等领域有了广泛应用。到 20 世纪 70年代,图像处理技术随着硬件技术和处理平台的发展较之前有了质的飞跃,在航天、工业、军事和医学都取得了显著成效。90 年代出现的小波技术促使图像重建和分解得到快速发展[6]。到目前为止,数字图像处理技术在我们生活的方方面面都发挥着积极作用。
........................
第二章 无人机管道巡检中图像导航系统相关理论
2.1 图像处理相关理论
2.1.1 相机成像原理
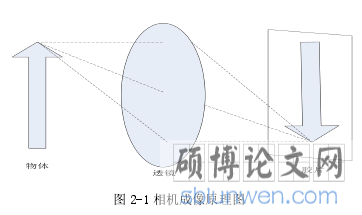
无人机图像导航过程中,摄像头是必不可少的一部分。无人机机载相机或树莓派配套摄像机一般由三个部分组成:感光元件、光圈和透镜。因为无人机航拍工作大多数是工作在高空,所以拍照控制都采用电子快门,无物理结构[13]。
无人机相机成像原理:相机的成像原理类似于凸透镜成像原理。由光源发射光并照射在凸透镜上,因为光的折射效应会在透镜后汇聚于一点[13]。以铅笔的笔尖为例,成像原理如图2-1 所示。
..............................
2.2 无人机相关理论
2.2.1 四旋翼无人机结构及主要模块
无人机主要由飞控系统、动力系统、通信系统和机架组成。常用的无人机通常采用四旋翼结构。小型四旋翼无人机是将飞行控制器固定在四个机架中间,四个旋翼均匀分布在四周实现飞行的特殊飞行器,外观图和结构图分别如图 2-8 和图 2-9 所示。

..................
第三章 图像导航算法设计及实验分析............................ 18........................
第二章 无人机管道巡检中图像导航系统相关理论
2.1 图像处理相关理论
2.1.1 相机成像原理
无人机图像导航过程中,摄像头是必不可少的一部分。无人机机载相机或树莓派配套摄像机一般由三个部分组成:感光元件、光圈和透镜。因为无人机航拍工作大多数是工作在高空,所以拍照控制都采用电子快门,无物理结构[13]。
无人机相机成像原理:相机的成像原理类似于凸透镜成像原理。由光源发射光并照射在凸透镜上,因为光的折射效应会在透镜后汇聚于一点[13]。以铅笔的笔尖为例,成像原理如图2-1 所示。
..............................
2.2 无人机相关理论
2.2.1 四旋翼无人机结构及主要模块
无人机主要由飞控系统、动力系统、通信系统和机架组成。常用的无人机通常采用四旋翼结构。小型四旋翼无人机是将飞行控制器固定在四个机架中间,四个旋翼均匀分布在四周实现飞行的特殊飞行器,外观图和结构图分别如图 2-8 和图 2-9 所示。
..................
3.1 算法实现总体设计..............................18
3.2 模块实验及结果........................... 18
3.3 本章小结....................... 28
第四章 基于图像导航的无人机二次开发.............................29
4.1 四旋翼无人机选型.................................... 29
4.2 开发理论及开发流程......................29
第五章 无人机管道智能巡检中图像导航系统设计........... 41
5.1 系统总体设计............................ 41
5.2 软件算法设计....................41
第五章 无人机管道智能巡检中图像导航系统设计
5.1 系统总体设计
本文提出无人机管道智能巡检中图像导航系统设计主要包括硬件设计和软件算法设计两方面内容。总设计框图如图 5-1 所示。
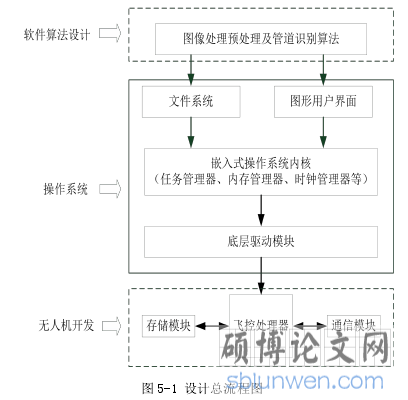
在图 5.1 中软件算法主要是指管道图像的滤波处理、彩色空间阈值分割处理、感兴趣区域提取、透视变化及偏转信息计算等;操作系统主要包括嵌入式系统选型、开发环境搭建、处理结果信息输出等;无人机二次开发主要是对无人机偏航角的控制方式进行重新设计与开发,实现基于输水管道图像处理算法的无人机飞行控制。
...........................
第六章 总结和展望
6.1 总结
本文针对宁夏盐环定扬黄工程水利管道设施在巡检中存在的问题,提出了采用无人机结合图像处理实现水利管道设施巡检智能化的技术方案。本文主要完成的工作有以下三点:
(1)通过水利管道的直线性,提出了不同于传统图像导航的新型图像导航算法,并通过多组对比实验最终完成新型图像导航算法设计。主要完成的实验步骤有:图像矫正、图像滤波、图像分割、石墩剔除、管道识别和偏转信息计算等。其中包括两组对比实验,首先是通过对比均值滤波、中值滤波、高斯滤波和双边滤波的滤波原理和优缺点,结合本文的对图像滤波的要求,选择具有良好保边去噪的双边滤波器对图像进行滤波操作。其次对边缘检测和阈值分割两种经典图像分割技术的原理和实验结果进行对比,本文用到的边缘检测对比算子有 Laplace 算子、Roberts 算子、Sobel 算子和 Canny 算子四种,其中 Canny 算子结果最优。阈值分割的对比实验有灰度阈值分割、LAB 空间阈值分割、HLS 空间阈值分割和 LUV 空间阈值分割,结合实验对比结果和算法设计需求,最终选择效果最优的 LUV 空间阈值分割方法对管道图像进行分割。
(2)完成了基于树莓派管道识别和偏转信息系统的开发,其中完成的主要工作有实时图像采集模块搭建、管道识别算法移植和利用串口将计算到的偏转信息输出到无人机飞控系统。
(3)通过对比常见无人机性能、价格和优缺点,选择开源 ATK-F405 飞控并完成了初步二次开发。本文完成了无人机偏航角和偏移量控制系统的二次开发,其中用管道识别中计算得到的偏转角度作为双 PID 环控制系统输入的一部分,从而实现无人机偏航角控制;通过循环对比实时计算得到的偏移量值与给定阈值的大小,实现无人机偏移量控制。
参考文献(略)