本文是一篇计算机论文,本文针对无人机精准农业操作难的问题,提出了对地图进行栅格化处理的方案,方案中采用的是序号法的方式,联合监测无人机采集到的农作物缺药的量化信息,考虑无人机的最大载重、最远航程,及飞行方式能耗等约束,以无人机的整体能耗和农田农药残留多目标优化问题,建立了无人机农业调度的数学模型。
第一章 绪论
1.1 研究背景及意义
随着科学技术和互联网的发展,传统农业与数字信息时代相融合,精准农业逐渐成为当今世界农业发展的新潮流[1][2]。《2019 全国县域数字农业农村发展水平评价报告》[3]在 2019 中国农业展望大会上发布。报告显示,2018 年全国县域数字农业农村发展总体水平达到 33%,其中,农业生产数字化水平达到 18.6%。根据农业农村部 11 月 28 日消息,农业农村部市场与信息化司会同农业农村部信息中心共同发布《2020 全国县域数字农业农村发展水平评价报告》,2019 年,县级数字农业和农村发展总体水平将达到 36.0%,比去年提高 3%。这近几年来的评估报告指出,中国农业生产的数字化转型正在迅速起步,预计未来几年这一趋势将持续下去。另外,根据不同行业分析,中国农作物种植数字化水平为 16.2%,设施养殖数字化水平为 27.2%,畜禽养殖业数字化水平为 19.3%,水产养殖业数字化水平为 15.3%。生产环境监测、体征监测、农作物病虫害、动物疫情的准确诊断与控制等数字化技术也首次应用于具有较高经济效益的行业。
智能施药[4]是精准农业发展的产物,中国作为农业大国,18 亿亩基本农田,大约拥有全球 7%的耕地,但化肥农药的使用量却是全球用量的 35%,农药利用率只有 36%左右。由于每年需要大量的农业植保作业,我国每年农药中毒人数有 10 万之多,致死率约 20%。农药残留和污染造成的病死人数至今尚无官方统计。根据农药市场信息《我国植保无人机突破 5 万架 2020 年将迎来新机遇》[5]显示,未来智能施药市场发展空间很大,精准农业将发生全方位的变化。
病虫害防治一直是农业生产中的关键问题,随着时代和科学技术的不断发展,农业生产中对病虫害防治的要求也在不断提高。从传统的将农药与水或沙子搅拌后人工播撒在田里,到喷雾药壶出现后,农业生产人员背负喷雾器手动按压播撒农药,后来还出现了电动喷雾药壶,虽提高了农药喷洒的效率,但人力还没有得到解放。农业生产人员要扛 10-20 公斤的农药箱才能在田里行走。这样不仅容易践踏庄稼,影响农作物的生长,而且农药喷雾的吸入也会严重影响农业生产人员的健康。这些传统方法的效率也十分低下,并没有得到现代化改进。与此同时,国外农场经常使用飞机喷洒农药,但只适用于大型农场,成本高,不利于我国基层农业生产人员使用。飞机驾驶和起降困难也是制约农户农业生产引进的重要因素。
...............................
1.2 国内外研究进展
1.2.1 国内外无人机施药技术的发展
航空施药[6]是用无人机或者其他飞行器将农药液剂、粉剂、颗粒剂等从空中均匀的喷施在目标区域内的一种施用方法,是精准农业中一个十分重要的环节,也是农业现代化的发展延伸。近年来,在农业领域,到处都有无人机的身影。主要用于农田作业的喷灌,播种,生长信息获取等方面,一般分为固定翼植保无人机、单旋翼植保无人机、多旋翼植保无人机。市面上一般多旋翼植保无人机[7]居多,通过采用模块化设计,使用与维护及其方便,通常使用锂电池作为飞行动力,平均满冲电池可连续工作 15 到 20 分钟,两个架次、喷幅宽度和飞行高度均可自由调整。因植保无人机具有远距离作业,作业效率高,作业精准度高,作业量大,成本低廉等特点,逐渐成为航空施药药械中最重要的组成部分。

计算机论文参考
大约在 100 年前,第一架由无线电操控的无人机在美国秘密试飞,由于无人机的便携性,1918 年,美国首次利用飞机在棉花上喷洒农药,打开了农用航空的大门,1922 年,美国将 JN-6军用飞机改良,装载农药后对植物进行喷洒。同年,前苏联也用了飞机喷洒的手段,轻而易举消灭了蝗灾。1949 年后,美国开始研制专门用于农业的农用无人机。由于无人机拥有众多的优点,各个国家对植保无人机越来越推崇,植保无人机的系统也得到了大幅度提升。20 世纪 90 年代,日本开始着手将遥控直升机用于各种果蔬的农药喷施作业中,实现精准农业。90年以后,日本千山公司又发明了一款专业喷施的植保无人机,由于作业灵活轻巧,适应各种因地势差异或者气候不同的作业区域。至今,日本成了第一个利用无人机做植保作业的国家。由于日本的地形因素与人文习惯,无人机植保在日本发展十分迅猛,成为了世界上农业航空最成熟的国家。俄罗斯幅员辽阔,人烟稀少,拥有庞大的农机作业队伍,数量高达 11000 多架[8],作业机型以载人固定翼飞机为主,年加工耕地超过耕地约占澳大利亚、加拿大耕地总量的 35%,巴西的农业航空发展模式与美国相似,主要机型为载人固定翼飞机和旋翼直升机。加拿大农业航空协会(Canada Agricultural Aviation Association,CAAA)目前共有 169 个会员。韩国 2003 年首次引进用于农业航空作业的直升机,农业航空作业面积逐年增加,到 2010 年,全国农业直升机 121 架(含农业无人机 101 架),全年植保作业面积 43460 个 hm2,有人驾驶直升机 20 架,在植保作业区 55200 hm2),约 80%的地上飞机安置了日本农业部所有的粮食、农林渔业和日本农业部的 500 架 2013 年飞机。
.........................
第二章 无人机农业调度系统需求分析及模型构建
2.1 系统总体方案
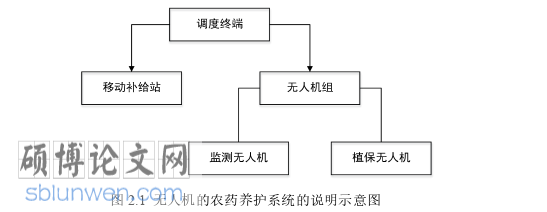
本文提出无人机农业灌溉调度系统,采用包括无人机组、调度终端和移动补给站协同调度方式,考虑多种约束(如无人机负荷约束、农田农药喷洒阈值等)、一个移动补给站、多个调度终端、两种类型的无人机,如图 2.1 所示。
计算机论文怎么写
在无人机农业调度系统方案中,无人机在飞行过程中无悬停。通过多次飞越统一区域,可以保证高需求区域的农药量,使无人机的经济巡航可以节省电力。无人机设备依旧采用电力驱动的方式,所携带的农药量和飞行的航程仍与传统的运输设备相比较小。无人机可用的能量和空间非常有限。
.........................
2.2 问题描述
2.2.1 网格划分研究
无人机路径规划方法是基于先验地图的,地图信息的准确性影响着路径规划的准确性。因此,网格生成是实现无人机农业调度的有效途径之一。从宏观上看,合理划分农田网格有利于提高喷灌等作业的便利性和效率。从中观角度来看,适当的网格尺寸有利于与智能设备的结合,加快现代农业的发展。从微观角度看,耕地网格大小的决策直接关系到不同作物精细化经营的安全性和经济效益。为了植保无人机的精确作业,对不同尺寸、不同作物喷灌区域进行合理网格划分,以辅助无人机精确喷灌。
农田网格化管理[33]可以看做是村镇社区网格化划分在农田区域的延伸和推广,针对当前大规模基本农田划定方法主观干预过多的问题,在综合考虑多因素的情况下,可以从土地利用结构、农田空间格局、土壤环境质量等方面,并结合《城市市政综合监管信息系统单元网格划分与编码规则》[34]原则,对大规模农田区域进行网格化管理。整齐的网格状多边形地块和圆形中枢轴地块标示出了这一地区的利用情况。
在考虑市面上植保无人机续航和载重等因素的情况下,大规模农田单元网格划分应综合考虑以下原则:
(1)地理布局原则:由于我国是农业大国,幅员辽阔,地形不同,对单位网格的划分应根据不同的地形环境,如平原、湖泊、丘陵、高原等不同地区,划分方案也有所不同。
(2)无缝拼接原则:为了便于植保无人机的规模化作业,可能会出现多户种植同一种作物的情况,可以对单元网格进行拼接。
(3)负载均衡原则:由于我国现代农业发展水平与发达国家存在较大差距,耕地与住宅建筑的界限比较模糊,应考虑耕地的完整性问题。由于无人机是一种经济巡航方式,喷灌不会在中间停止,所以单元格的边界不应跨越建筑物。
(4)灵活划分原则:由于不同的季节,不同的家庭选择不同的作物,耕地网格划分应保持变化。
综上所述,农田网格划分不应仅依据面积划分或作物种类划分的原则,而应充分考虑植保无人机的属性、地理布局、天气气候等因素。
........................
第三章 多目标智能优化算法设计....................................... 18
3.1 轮盘赌选择法.......................... 18
3.2 启发式算法..................................... 18
第四章 农药喷洒任务分配问题仿真实验............................... 26
4.1 仿真实验参数设置.................................. 26
4.2 模型求解算法的对比实验................................ 27
第五章 智慧农场的无人机精细灌溉系统................................ 33
5.1 技术选型............................................33
5.1.1 前后端技术......................................... 33
5.1.2 名词解释...................................... 33
第五章 智慧农场的无人机精细灌溉系统
5.1 技术选型
随着 Web2.0 时代的到来,前后端开发技术发展迅速。前后端分离已成为互联网项目开发的业界标准使用方式,通过 Nginx+Tomcat 的方式(也可以中间加一个 NodeJS)有效地进行解耦,并且前后端分离会为以后的大型分布式架构、弹性计算架构、微服务架构、多端化服务等打下坚实的基础。这个步骤是系统架构从猿进化成人的必经之路。其核心思想是前端HTML 页面通过 Ajax 调用后端 restful API 接口,并与 JSON 数据进行交互。
5.1.1 前后端技术
目前流行的 Web 前端开发技术包括三种基本技术,用于页面架构的 HTML、用于实现页面风格的 CSS 和用于页面交互的 JavaScript。HTML5 是 HTML 技术的最新规范,CSS3 是CSS 技术的代表,而 JavaScript 是一种非常灵活的脚本语言。在现代网站设计和生产,HTML5,CSS3 和 JavaScript 越来越普遍,不仅讲究传统的个人电脑页面,同时也广泛用于 Win32 桌面程序和微信官方账户平台。
Web 后端开发技术包括,用于负责接收参数,调用相关业务层,封装数据以及路由和渲染到 JSP 的后台框架 Spring + Mybatis,结合 Java 基础,分布式缓存 Redis,设计模式等,实现后端高并发、高可用、高性能的功能特性。
5.1.2 名词解释
Nginx:是一个高性能的 Http 和反向代理服务器,特点是占有内存少,并发能力强,具备 Squid 等专业缓存软的功能,支持异步网络 I/O 事件模型 epoll。
Ajax:是指一种创建交互式、快速动态网页应用的网页开发技术,无需重新加载整个网页的情况下,能够更新部分网页的技术。通过在后台与服务器进行少量数量交换,Ajax 可以使网页实现异步更新。这意味着可以在不重新加载整个网页的情况下,对网页的某部分进行更新。
HTML:全称超文本标记语言(Hyper Text Markup Language),它不是一种编程语言,而是用于描述页面的一种标记规范,它是标准通用标记语言下的一个应用,通过标记符号来标记要显示的网页中的各个部分,通常存储于网页文本文件中,以此来告诉浏览器如何显示其中的内容。
JavaScript:简称为 JS,是一种面向网页的解释型脚本语言,是具有动态性的、弱类型的、基于事件驱动的语言。
.............................
第六章 总结与展望
6.1 总结
本文研究了无人机农业调度路径问题。由于新农业的发展,该问题是近年来涌现的新问题,其中,舍弃了传统植保无人机巡航统一喷洒的作业方式,需要综合考虑了无人机本身的性能,飞行续航,载重容量及农田农药最大喷洒量等限制约束,参考了很多有关路径规划的文献后,在对传统蚁群算法进行研究的基础上,设计并提出了一种快速自适应动态蚁群算法,主要做了如下几个方面的研究:
(1)针对无人机精准农业操作难的问题,提出了对地图进行栅格化处理的方案,方案中采用的是序号法的方式,联合监测无人机采集到的农作物缺药的量化信息,考虑无人机的最大载重、最远航程,及飞行方式能耗等约束,以无人机的整体能耗和农田农药残留多目标优化问题,建立了无人机农业调度的数学模型。
(2)针对传统蚁群算法很难同时解决收敛速度慢、局部停滞的缺陷,在对路径网格选择时,算法引入了精英策略,用来对信息素浓度的调节与控制进行了改进与优化。同时对地图进行预处理,将初始状态的信息素浓度与农田网格缺药量结合,另外,算法还加入了气味扩散策略,极大地提高了算法的收敛速度和搜索能力。
(3)论文最后进行了算例分析,将不同地图大小,不同农作物,不同无人机类型对算法的适用,进行了结果对比,并设计出最优的路径方案。
(4)设计了针对无人机农业调度的智慧农场的原型系统,引入了各种场景下的栅格化地图,真实模拟了无人机农业灌溉飞行的场景。
参考文献(略)