本文是一篇电气自动化论文,本研究针对兰新铁路列车在运行过程中风载荷引起的弓网动态接触失效的问题,通过两方面来防止弓网动态接触失效。一方面是参数匹配:通过改变受电弓的参数来被动降低弓网接触压力波动。
1绪论
1.1背景及意义
铁路作为我国国民经济的大动脉和重要的国家基础设施,在支撑和引领社会经济发展方面发挥着重要作用。预计到2025年,我国铁路网规模将达到17.5万公里左右,覆盖范围进一步扩大,路网结构更加优化,骨干作用更加显著;到2030年,基本实现内外互联互通,更好地发挥铁路对经济社会发展的保障作用[1]。
兰新铁路是中国西北地区铁路网络的重要组成部分。兰新铁路经过数个大风区,其中的十五里风区、百里风区,均在内陆是风力最为强劲的地区之一[2]。大风区强风频繁,风力变化剧烈,严重影响兰新铁路的正常运营[3]。图1.1为兰新铁路线路图。

电气自动化论文怎么写
兰新线途径“百里大风区”,列车的安全运行受到威胁。针对这一问题,本文基于兰新线,以弓网耦合系统为研究对象,从参数匹配和主动控制两个方面来防止弓网接触压力失效,进行了弓网动态接触防失效的研究。
.......................
1.2研究现状
本文主要进行弓网动态接触防失效研究,提高弓网系统受流质量。研究弓网系统参数影响弓网接触压力波动的规律,将受电弓参数和吊弦频率进行参数匹配,通过单变量和多变量寻优找到最优参数,防止弓网动态接触失效。通过主动控制方法,实现对弓网接触压力的控制,降低压力波动,提高列车受流质量,保证列车平稳安全运行。
1.2.1弓网关系
弓网关系是电气化铁路三大关键力学问题之一,同时也是制约列车最高运行速度的主要因素[4]。由于建设实际的试验线路的成本极高,因此研究弓网关系时计算机仿真成了最优的选择。弓网系统主要由接触网系统和受电弓系统构成。
接触网系统主要有两个作用。一是为机车的运行提供电能;二是为受电弓提供滑行的滑道。接触网的有四种主要的悬挂形式分别为:简单接触悬挂,链形接触悬挂,半补偿弹性链形悬挂和全补偿弹性链形悬挂[5]。为了建模的方便性和有效性,一般情况下需先进行结构的简化,然后进行建模[6]。主要的四种模型为变刚度模型,集中质量模型,有限元分析模型以及模态分析模型[7]。变刚度模型是将接触网的质量、刚度进行周期函数拟合,该模型数学表达式简单,计算机求解速度快[8]。集中质量法是指将研究对象进行分段,假想各段之间通过节点进行连接,其中节点是有质量的,而段是没有质量的。有限元模型分析法比较复杂,模型精度高但计算机求解速度慢。模态分析模型是将接触线和承力索等效为欧拉-伯努利梁,这样得到的模型是二维模型[9]。根据现场实地调研结果,本文对接触网建模时采用欧拉梁模型法。
在受电弓建模方面,早期是将点载荷施加到接触线上来模拟受电弓对接触线的作用,然而精度与实际线路上受电弓复杂的非线性运动相差很大,并不能满足工程实践的要求[10]。经过多年发展,众多学者提出了常用的四种类型的受电弓研究模型。第一类为非线性多刚体模型:非线性多刚体模型分为非线性多刚体数学模型和非线性有限元多刚体模型[11]。有限元多刚体模型作为三维空间模型,不仅包括受电弓在垂直方向的振动,也包括其在水平方向的振动[12]。第二种模型是刚性-柔性混合模型:刚性-柔性混合模型有明显的缺点,模型的空间自由度太低,动力学方程难以表达[13]。第三类为全柔性模型:全柔性模型是利用有限元分析软件,将受电弓各结构进行分离,最后经过受力分析,进行物理上力学性质的耦合。第四类为线性归算质量模型:线性归算质量模型是将受电弓的不同结构等效为质量块,相邻质量块间的作用通过刚度和阻尼来表示。
.....................
2兰新线弓网耦合系统建模
2.1接触网建模
2.1.1接触网组成
实际的接触网很难进行全面的研究,鉴于本文主要进行弓网动态接触防失效研究,重点关注其动态特性,因此对实际的接触网做了一定程度的简化[48]:
(1)主要考虑接触网的垂向振动;(2)把承力索和接触网视为欧拉梁;(3)把吊弦视为有一定刚度和阻尼的弹簧;(4)假定接触网的质量全部都集中在节点上。
以上假定是在符合兰新线接触网标准的前提下进行设定的,这样的简化能够方便对接触网进行建模以及对其特性进行研究,且误差在可控范围之内。根据调研结果,兰新线采用简单链形接触悬挂方式,如图2.1所示。

电气自动化论文怎么写
图2.1各符号含义如下:T为张力,EI为弹性模量,ρ为密度,下标为A代表承力索参数,下标为B代表接触线参数;m表示质量,k表示刚度,下标为Ai表示第根支撑杆参数,下标为Bi表示第个定位器参数,下标为Di表示第个吊弦参数。L为锚段长度。
..........................
2.2受电弓建模
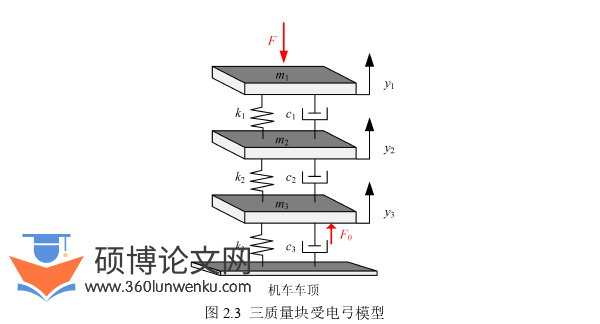
受电弓三质量块模型如图2.3所示。考虑质量块彼此之间的相互作用力,将三个质量块通过阻尼和刚度进行力学性质的耦合,其模型图如下:
电气自动化论文怎么写
图2.3中,y1、y2、y3分别为弓头和上框架以及下框架的垂向位移;F0表示受电弓的静态抬升力。列车高速运行时受电弓的气动特性显著,一般可认为20F700.0097v,在我国一般被设为120 N,F表示受电弓的动态接触压力。
本文以兰新线DSA250.30型单臂受电弓[53]为研究对象进行分析,k1、k2、k3;m1、m2、m3;c1、c2、c3参数的含义和数值见表2.2。
...........................
3质量块受电弓参数匹配..................................21
3.1弓网接触压力波动分析.......................21
3.2受电弓机械阻抗........................................22
4多体受电弓参数匹配...................................30
4.1受电弓的多体模型.........................................30
4.2等效模型特性分析............................................32
5风致接触线抖动的受电弓反步主动控制..............................41
5.1弓网系统状态方程....................................41
5.2反步控制器策略分析及设计...........................42
5风致接触线抖动的受电弓反步主动控制
5.15.2反步控制器策略分析及设计
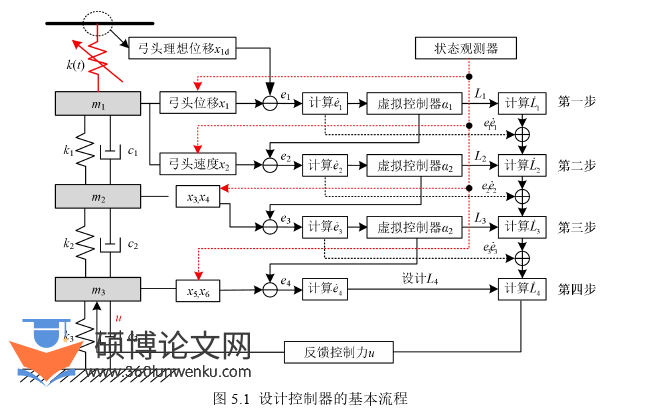
本文中目标接触力假设为恒定值,首先根据目标弓头位移和实际位移的误差,通过虚拟控制器1,使得所设计的Lyapunov函数L1的导数负定,根据1L负定的具体条件,依次完成剩余虚拟控制器与Lyapunov函数设计,直至推导出整个系统的反馈控制率u。对于系统中不可测速度状态x2,x4,x6,由设计的观测器估计值2 4 6xˆ,xˆ,xˆ代替。整个弓网系统控制器设计的基本流程如图5.1所示。
电气自动化论文参考
............................
结论
针对兰新铁路列车在运行过程中风载荷引起的弓网动态接触失效的问题,通过两方面来防止弓网动态接触失效。一方面是参数匹配:通过改变受电弓的参数来被动降低弓网接触压力波动。但由于参数存在阈值,不满足实际工程需要,因此另一方面是主动控制:通过在受电弓上安装作动器,实时控制升降从而降低振动幅度。结论如下:
(1)建立了接触网模型和受电弓三质量块模型,得到弓网耦合模型。推导当脉动风激励作用在接触线上时,接触线受到的的抖振力,修正脉动风激励下的弓网模型。
(2)分析了弓网滑动耦合振动机理,研究了受电弓参数对弓网系统振动幅值的影响;其次,对受电弓模型进行Laplace变换,推导了受电弓机械阻抗的频域表达式;最后,在不同受电弓机械阻抗参数下,由于接触网吊弦处易发生弓网耦合振动,因此在吊弦处进行弓网动态接触防失效参数匹配。结果显示,选择的合适的受电弓机械参数使受电弓的振动频率接近接触网吊弦频率,参数优化后吊弦频率附近10-20Hz范围内的响应的幅值明显减小。
(3)推导了受电弓的多体模型,分析弓网接触压力波动原因,发现减小受电弓机械阻抗可以使弓网接触压力波动减小,提高受流质量。对受电弓微分方程进行Laplace变换得到受电弓机械阻抗的幅频特性曲线,发现存在两个转折频率。改变受电弓参数,以转折频率的变化为依据对受电弓参数进行敏感度评级,发现KH和MF敏感度最高。缩小参数范围,寻找最优参数KH和MF,仿真发现优化后弓网接触压力波动明显减小。单一变量匹配计算得到的参数已超出范围,不具有指导受电弓实际生产的意义。接下来用50组数据得到目标函数的多项式方程,多变量寻优求取最优参数。
(4)建立了弓网状态空间模型,根据反步控制策略,设计虚拟控制器,推导出状态反馈控制力u,并证明虚拟控制器的微分可显式计算,从而系统最终输出的接触力能够有效跟踪到目标值。对于系统中不可测的速度状态(x2,x4,x6)设计观测器对其进行估计,并证明了观测误差的全局渐近稳定性。研究了不同速度下的跟踪偏差,弓网系统的弓网接触压力经过控制器后,接触力波动降低,受流质量提高。
参考文献(略)