
第一章 引言
1.1 研究背景
随着现代信息科学技术和汽车技术的融合,当代的汽车与传统的汽车的区别越来越大。当代的汽车与传统的汽车的区别是传统的汽车都是基于机械和线束的控制而当代的汽车的控制都是基于 ECU(Electronic Control Unit)的控制并且当代的汽车的发展趋势是越来越数字化、智能化、无人化。当代的汽车各个设备器件的功能都是由自己配套的 ECU 控制。不同的汽车型号根据需求的不同,ECU 的数量也是不同的但通常情况下当代汽车内平均含有 20 个到 100 个 ECU,每个 ECU负责自己相应器件设备的功能。例如,当代汽车主驾驶或副驾驶座位位置的调整,通过触发电动按钮,从而触发 ECU,ECU 再控制座位的位置;驾驶人员通过转动方向盘,给控制前轮转向的 ECU 一个信号,ECU 根据这个信号,从而调整前轮的角度;判断车内是否有人,是通过红外感应器发信号给相应的 ECU,从而进行判断,最后 ECU 给出相应的提示;当代汽车都有 ABS(制动防抱死系统),它也是通过 ABS 的 ECU 控制的,从而使汽车驾驶更安全,根据这些实例可以看出当代汽车处处都有 ECU 控制。这些 ECU 都是根据外界的触发条件触动,从而做出不同的行动措施。ECU 采取不同的行动措施是根据汽车所处的状态而定。这些状态主要包括了汽车驱动状态、行驶状态、静止状态等等。随着人们对高质量生活的追求,为了满足这种需求,当代汽车的功能也是越来越方便,越来越丰富,从而相应的 ECU 的代码数量也在逐渐的增加。一般目前高档次的汽车的 ECU 的代码量在万行级别,无人驾驶汽车甚至达到了亿万行的数量级级别,从而可以看出当代汽车与 ECU 密不可分。
1.1 研究背景
随着现代信息科学技术和汽车技术的融合,当代的汽车与传统的汽车的区别越来越大。当代的汽车与传统的汽车的区别是传统的汽车都是基于机械和线束的控制而当代的汽车的控制都是基于 ECU(Electronic Control Unit)的控制并且当代的汽车的发展趋势是越来越数字化、智能化、无人化。当代的汽车各个设备器件的功能都是由自己配套的 ECU 控制。不同的汽车型号根据需求的不同,ECU 的数量也是不同的但通常情况下当代汽车内平均含有 20 个到 100 个 ECU,每个 ECU负责自己相应器件设备的功能。例如,当代汽车主驾驶或副驾驶座位位置的调整,通过触发电动按钮,从而触发 ECU,ECU 再控制座位的位置;驾驶人员通过转动方向盘,给控制前轮转向的 ECU 一个信号,ECU 根据这个信号,从而调整前轮的角度;判断车内是否有人,是通过红外感应器发信号给相应的 ECU,从而进行判断,最后 ECU 给出相应的提示;当代汽车都有 ABS(制动防抱死系统),它也是通过 ABS 的 ECU 控制的,从而使汽车驾驶更安全,根据这些实例可以看出当代汽车处处都有 ECU 控制。这些 ECU 都是根据外界的触发条件触动,从而做出不同的行动措施。ECU 采取不同的行动措施是根据汽车所处的状态而定。这些状态主要包括了汽车驱动状态、行驶状态、静止状态等等。随着人们对高质量生活的追求,为了满足这种需求,当代汽车的功能也是越来越方便,越来越丰富,从而相应的 ECU 的代码数量也在逐渐的增加。一般目前高档次的汽车的 ECU 的代码量在万行级别,无人驾驶汽车甚至达到了亿万行的数量级级别,从而可以看出当代汽车与 ECU 密不可分。
当代汽车内的 ECU 大多数不是孤立存在的。因为要完成某些功能它们需要互相配合,它们之间的配合是通过车载网络。汽车车载网络主要包括了 LIN、CAN、FlexRay、MOST 类型的车载网络。其中 CAN 总线车载网络根据传输速度的不同还可以具体细分为低速 CAN 总线车载网络和高速 CAN 总线车载网络。有时不同的类型的车载网络之间要跨网络通信,就需要车载的网关模块。车载网关模块的主要作用是协调不同网络之间的频率,控制不同网络之间的数据流量,最重要的是车载网络协议之间的相互转换,从而使不同网络之间顺利地进行通信。
.............................
第三章 车载网络信息安全威胁分析 .................................... 18.............................
1.2 研究现状
1.2.1 国外研究现状
由于汽车智能化、数字化、无人化的相关概念最先在国外提出,所以国外相关的大学、研究所和相关组织对这方面的研究要先一步早于国内。同时,对车载网络的信息安全问题的研究也先一步早于国内。国外的政府和汽车厂家研究的核心主要放在车载网络的软件安全框架和车载网络的通信协议上。欧盟和美国的相关政府组织很积极地支持汽车车载网络信息安全方面的项目,比如欧盟目前对这方面的研究就有 EVITA,OVERSEE,SEVECOM 等项目[5]。EVITA 项目的目的在于相关概念上的定义和设计车载网络的软硬件安全架构,以此来保证车载网络的信息安全[6]。EVITA 项目设计了三层架构的安全规范,其中包含了 HSM(硬件安全模型),HSM 又分为了 Light HSM(轻量级硬件安全模型) ,Medium HSM(中量级硬件安全模型)。HSM 目的是保护车载网络的完整性,确保车载网络信息的完整性和可信度。其中,Medium HSM 的作用是保护挂载在车载网络上的 ECU 之间的互相通信。Light HSM 的作用是通过传感器和执行器来保护 ECU 之间的相互通信。OVERSEE 项目设计了开放性的云服务汽车平台,平台通过远程网络为汽车车载网络提供驾驶辅助等服务.
1.2.1 国外研究现状
由于汽车智能化、数字化、无人化的相关概念最先在国外提出,所以国外相关的大学、研究所和相关组织对这方面的研究要先一步早于国内。同时,对车载网络的信息安全问题的研究也先一步早于国内。国外的政府和汽车厂家研究的核心主要放在车载网络的软件安全框架和车载网络的通信协议上。欧盟和美国的相关政府组织很积极地支持汽车车载网络信息安全方面的项目,比如欧盟目前对这方面的研究就有 EVITA,OVERSEE,SEVECOM 等项目[5]。EVITA 项目的目的在于相关概念上的定义和设计车载网络的软硬件安全架构,以此来保证车载网络的信息安全[6]。EVITA 项目设计了三层架构的安全规范,其中包含了 HSM(硬件安全模型),HSM 又分为了 Light HSM(轻量级硬件安全模型) ,Medium HSM(中量级硬件安全模型)。HSM 目的是保护车载网络的完整性,确保车载网络信息的完整性和可信度。其中,Medium HSM 的作用是保护挂载在车载网络上的 ECU 之间的互相通信。Light HSM 的作用是通过传感器和执行器来保护 ECU 之间的相互通信。OVERSEE 项目设计了开放性的云服务汽车平台,平台通过远程网络为汽车车载网络提供驾驶辅助等服务.
Groza 等针对 CAN 总线车载网络的信息安全问题进行了多方面的相关研究工作,提出了适用于车载网络的一系列轻量级广播认证协议,例如 Libra-CAN、EPSB并通过相关的实验验证了这系列的协议在车载网络 ECU 数量较少的情景下的可用性[8-10]。LIN 设计了一款基于纯软件的 CAN 总线安全体系(IDT&C),其具有通信开销低的优点而且通过 CAN 消息报文的 ID 特性形成 ID 表和消息报文数目计数器共同生成唯一的 MAC[11]。Schweppe 等相关研究人员推荐使用 EVITA HSM 安全架构里的通信结构,进一步提出了用 32 位的 MAC 安全体系,但是他们没有给出具体实施细节[12, 13]。Woo 等通过使用蓝牙方式或无线方式成功地远程入侵车载网络的诊断接口 OBDⅡ设备,从而向 CAN 总线车载网络发送恶意的攻击报文消息,针对他们相应的攻击方式提出了使用密码学中的一种 AES-32 加密算法对 CAN 报文消息进行加密,并且把此种方法与 IDT&C、EPSB 相关的方法做了对比。这些对比主要包括了在不同数量的 ECU 的运行场景中的传输数据的反馈时间、运行时间和 CAN 总线的数据载荷量,其中在 ECU 数目低于 20 个的场景中,CAN 总线的数据载荷为 50%[14]。
...............................
第二章 本文相关知识和理论基础
2.1 车载网络简介
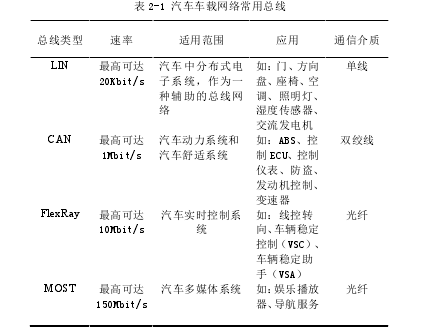
随着电子技术的发展,汽车内部控制单元的数目逐渐增多,相应的传感器和执行器也随之逐渐增多,汽车内部控制单元之间的线路越来越复杂,造成了线束长度过度冗余。为了减轻整车质量、节约汽车成本、保证汽车质量可靠、减少汽车装配时间,就衍生了汽车车载网络。汽车车载网络是汽车内部控制单元之间通信的载体,其包括了相应的协议规则和消息格式的定义,它把各种控制单元统一在一起,各个控制单元挂载到车载网络上,因此控制单元也称为ECU网络节点。汽车车载网络是由相应的总线组成。目前在汽车内部最常见的总线是:CAN、MOST、LIN、FlexRay总线,如表2-1所示,每种总线都有相应的通信速率、适用范围、应用场景、通信介质。
............................
2.2 CAN 总线工作原理
2.2.1 CAN 总线协议
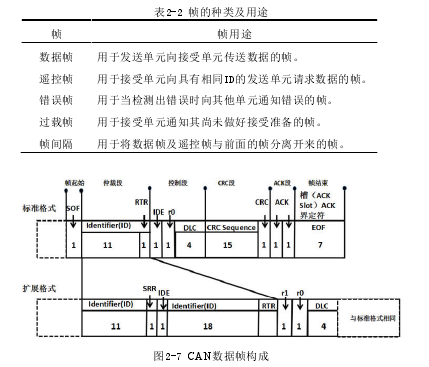
CAN总线协议是由德国BOSCH公司开发,CAN总线协议已经成为汽车计算机控制系统的标准。CAN总线各控制单元之间通信是通过CAN报文帧。CAN报文帧分为了5种类型,分别是数据帧、遥控帧、错误帧、过载帧、帧间隔。另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有11位的标志符(Identifier:以下简称ID),扩展格式有29位ID,各种帧的用途如表2-2所示,其中数据帧的构成如图2-7所示。
............................
第二章 本文相关知识和理论基础
2.1 车载网络简介
随着电子技术的发展,汽车内部控制单元的数目逐渐增多,相应的传感器和执行器也随之逐渐增多,汽车内部控制单元之间的线路越来越复杂,造成了线束长度过度冗余。为了减轻整车质量、节约汽车成本、保证汽车质量可靠、减少汽车装配时间,就衍生了汽车车载网络。汽车车载网络是汽车内部控制单元之间通信的载体,其包括了相应的协议规则和消息格式的定义,它把各种控制单元统一在一起,各个控制单元挂载到车载网络上,因此控制单元也称为ECU网络节点。汽车车载网络是由相应的总线组成。目前在汽车内部最常见的总线是:CAN、MOST、LIN、FlexRay总线,如表2-1所示,每种总线都有相应的通信速率、适用范围、应用场景、通信介质。
............................
2.2 CAN 总线工作原理
2.2.1 CAN 总线协议
CAN总线协议是由德国BOSCH公司开发,CAN总线协议已经成为汽车计算机控制系统的标准。CAN总线各控制单元之间通信是通过CAN报文帧。CAN报文帧分为了5种类型,分别是数据帧、遥控帧、错误帧、过载帧、帧间隔。另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有11位的标志符(Identifier:以下简称ID),扩展格式有29位ID,各种帧的用途如表2-2所示,其中数据帧的构成如图2-7所示。
............................
3.1 车载网络外部安全威胁分析 .................................... 18
3.1.1 TSP 安全威胁分析 ....................................... 18
3.1.2 APP 安全威胁分析 ....................................... 20
第四章 基于关联规则的车载网络入侵检测研究 .......................... 27
4.1 关联规则概述 ................................................ 27
4.2 关联规则引入车载网络入侵检测优点 ............................ 27
4.3 关联规则挖掘 ....................... 27
第五章 入侵检测系统原理与入侵检测验证 .............................. 33
5.1 标记 ECU ......................... 33
5.1.1 时钟偏差作为标记参数 .................................. 33
5.1.2 时钟偏差估计分析 ...................................... 34
第五章 入侵检测系统原理与入侵检测验证
5.1 标记 ECU
........................
第六章 总结与展望
6.1 总结
随着当代的汽车越来越智能化、数字化、无人化。汽车内部的功能越来越丰富,越来越多的汽车内部都整合了与汽车外部环境通信的网络模块,这也给汽车带来了更多的信息安全威胁。最近几年来,关于汽车车载网络攻击的案列和攻击实验层出不穷,因此汽车车载网络的信息安全不再是一个可忽略的问题,必须引起重视。尤其是这方面的攻击所造成的后果跟传统互联网安全不同的是,汽车信息安全方面的攻击所带来的后果不仅有财产方面的的损失,而且更严重的是它会对车内的人造成生命威胁。未来,由于汽车的发展趋势必将是朝着智能化、数字化、无人化发展,所以为了防患于未然,汽车车载网络必须应该拥有相应的信息安全防护机制。本文提出了适应于车载网络的的入侵检测系统,主要的工作和研究成果如下:
⑴ 分别介绍了目前常见的 LIN、MOST、CAN、FlexRay 总线车载网络,着重介绍了应用比较多的 CAN 总线网络并描述了 CAN 相关的各种特性。
⑵ 分析和归纳了车载网络所面临的信息安全方面的威胁,按照汽车内部和外部环境把信息安全威胁分为了两大类即车载网络外部安全威胁和车载网络内部安全威胁。对车载网络外部安全威胁详细分为了四大类:TSP 安全威胁、APP 安全威胁、T-Box 安全威胁、IVI 安全威胁,并分别分析了它们各自的特征以及潜在的攻击方式。对车载网络内部安全威胁详细分为了两大类:CAN-Bus 总线安全威胁、ECU 安全威胁,并分析了 CAN 总线的广播特性、仲裁原理方面的安全威胁,即无法通过报文消息去识别是报文发送源等,最后分析了 ECU 固件的安全缺陷以及攻击手段。
⑶ 由于车载网络内部之间报文消息之间,ECU 之间的关联关系,对于第三方来说是不透明的,为了弄清车载网络报文消息之间,ECU 之间的关联关系,通过对采集的总线数据进行数据分析,挖掘出了它们存在的关联关系。即报文消息之间都存在固定的时间间隔等。
参考文献(略)