本文是一篇机械论文,
第1章 绪论
1.1 研究背景和意义
随着电子信息技术的不断发展,人类社会进入新的信息时代,电子信息产品成为现代生活中不可或缺的组成部分,深刻影响着人们的社会生产和生活方式。电子产品采用的集成电路(Integrated Circuit, IC)不断追求小型化和精密化,推动着微电子技术和产业的高速发展。目前,微电子产业已成为国家基础性产业,不仅在国民经济上有巨大贡献,而且在现代国防上起着重要作用。近年来,国家高度重视微电子相关技术的研究,“中国制造2025”和“十三五”规划里均提出要大力发展集成电路制造产业,推动中国从电子制造大国向电子制造强国转变[1]。
SMT是一种将片式电子元件安装和焊接到PCB上的自动化组装技术,和传统的通孔插装相比,SMT工艺组装密度高,其产品具有体积小、质量轻和可靠性高等优点[2],因此,SMT已成为电子组装行业至关重要的核心技术,并得到了广泛应用。在美国和日本等发达国家,使用SMT生产的电子产品已经占了80%以上[3]。SMT工艺的主要流程包括锡膏印刷、元件贴放和回流焊接[4],相应的主要生产设备分别为锡膏印刷机、全自动贴片机和回流焊炉,同时,还包括产品自动光学检测、清洗与干燥、物料存储、物料接驳等一系列辅助设备,如图1.1所示。其中,全自动贴片机用于实现电子元件的高速、高精度定位与放置,是SMT生产线的核心设备,其成本一般占整条生产线成本的60%以上[5]。

机械论文怎么写
..........................
1.2 研究现状
1.2.1 贴片机发展概况
国外贴片装备的研制最开始于20世纪70年代,表面贴装产品的性能优势使得SMT的应用从军事、航空航天等尖端领域逐渐向通信、工业控制和民用电子产品等行业延伸,在市场推动下出现了第一代贴片机[8]。虽然,相对于手工插件组装而言,贴片机的出现无疑是电子组装技术的一次革命,但早期贴片机依靠纯机械装置定位,存在贴装精度低(约±0.25mm)和贴装效率差(约1000~2000cph)等问题。
20世纪80年代中期到90年代后期,国外一些发达国家在SMT领域的研究上投入了大量人力物力,许多科技公司和学者开始研究机器视觉技术在SMT生产中的应用[9-11],贴片机逐步采用机器视觉定位取代了纯机械定位,使得贴装精度和速度得到大幅提升,这一时期的产品被认为是第二代贴片机[12]。第二代贴片机形成了高速贴片机和泛用型贴片机两类,高速贴片机注重贴装效率,泛用型贴片机贴装范围广泛。
20世纪90年代末开始,微电子技术的高速发展使得电子产品的精密程度和元件种类丰富度不断提高,研发人员从视觉定位[13]、运动控制[14]、贴片规划[15]等方面不断对贴片机进行改进和迭代,提出了模块化、细胞机等结构,致力于在同一台机器上兼顾高速、高精度和高芯片覆盖率,逐渐模糊了高速贴片机和泛用性贴片机的界限。
........................
第2章 贴片机视觉定位预处理算法
2.1 图像增强
2.1.1 灰度变换
灰度变换是数字图像处理中的一类点处理技术,对于每个像素点,变换后的灰度值只与自身原来的灰度值有关,表达式如式(2-1)。
????=????(????) ( 2-1 )
其中,r、s分别为像素点变换前后的灰度值,F为灰度变换函数,使用不同的变换函数以达到不同的处理效果,常用的灰度变换函数如下:
(1) 对数变换:表达式见式(2-2),对数变换可以扩展暗像素的灰度级范围,用于显现或突出暗区域对象的细节。
????(????)=????????????????(1+????) ( 2-2 )
(2) 伽马变换:又称幂律变换,如表达式(2-4),通过幂值????控制灰度变换的性质与幅度,????>1时,可扩展亮像素的灰度级范围,突显亮区细节;????<1时,效果和对数变换类似,突出暗区细节。
????(????)=???????????? ( 2-3 )
(3) 分段线性变换:一般表达式如式(2-4),将灰度区间[????1 , ????2]内的灰度值线性映射到区间[????1 , ????2],通常取????1<????1且????2>????2,即把[????1 , ????2]作为感兴趣区间进行拉伸,以增强这部分像素的对比度。
........................
2.2 图像边缘提取
2.2.1 边缘检测
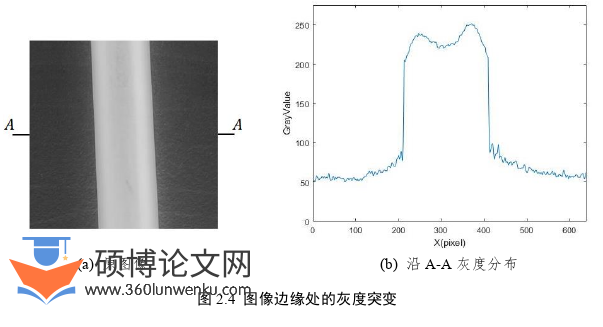
边缘是图像中灰度特性具有明显差异的区域之间的边界,包含丰富的图像信息,是图像处理中普遍使用的重要特征之一。如图2.4所示,图像边缘处灰度值将发生阶跃,这是图像边缘的基本性质,因此,通过对图像进行微分运算,搜索出灰度突变较大的位置,便能够有效地检测出图像边缘,常用的方法一阶微分法和二阶微分法。
机械论文参考
...........................
第3章 PCB基准点定位算法 ................................ 31
3.1 PCB基准点简介 ....................................... 31
3.2 十字形基准点定位算法 ............................. 32
第4章 芯片位姿定位算法 ...................................... 47
4.1 芯片位姿定位及纠偏原理 ................................ 47
4.2 芯片位姿定位算法总体方案 ....................... 48
第5章 实验验证及应用 ............................... 61
5.1 多功能贴片机实验平台 ........................... 61
5.2 PCB基准点定位算法验证 ................................ 62
第5章 实验验证及应用
5.1 多功能贴片机实验平台
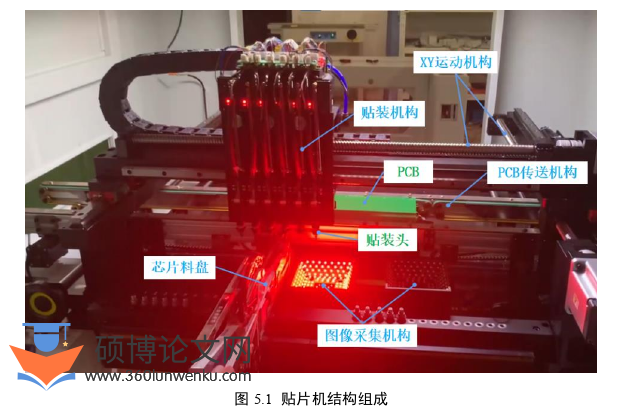
如图5.1为本论文合作企业研发生产的中小型多功能贴片机,其贴装系统主要包括XY运动机构、PCB传送机构、图像采集机构、贴装机构和芯片料盘等结构。工作时,传送机构将PCB运送至贴装位置并固定,贴装机构上安装的下视相机用于拍摄PCB基准点图像进行PCB定位;同时,贴装机构上的六个贴装头通过吸盘拾取料盘上的芯片元件;拾取元件后,贴装机构带动贴装头依次通过工作台上的图像采集机构上方,由上视相机采集芯片图像进行芯片定位。其中,该系列贴片机配置的工控计算机处理器型号为Intel Core [email protected]。
机械论文参考
.........................
第6章 总结与展望
6.1 全文总结
在微电子制造业中,全自动贴片机是关键的生产设备。目前,国产贴片机的性能和国外相比存在较大差距,导致国内SMT生产所需的高端贴片机仍依赖于进口。因此,如何提高贴片机的贴装精度、速度和芯片可贴装范围等综合性能,提升国产贴片机的竞争力,是一个亟需解决的问题。机器视觉定位技术是高性能贴片机的技术突破口之一,本文面向多功能贴片机,对其视觉定位关键技术开展研究,主要工作如下:
(1)研究了贴片机视觉定位技术中的预处理算法,主要包括图像增强、图像边缘提取和相机标定三类算法,阐述了上述算法的原理,并设计实现了一种基于拉格朗日插值法的亚像素边缘提取算法,同时进行了相机标定实验,完成相机内部参数和畸变系数的标定。
(2)研究了PCB基准点定位方法,提出了一种改进的Radon变换直线检测算法,通过缩小变换域和排除噪点提高检测效率和准确性;然后基于改进的Radon变换算法和迭代加权最小二乘拟合算法,分别设计与实现了PCB十字形基准点定位算法和圆形基准点定位算法。
(3)针对多功能贴片机的需求,开展高精度、高通用性的芯片位姿定位算法研究。首先阐述了芯片定位和纠偏原理,并分析了芯片图像特征,在此基础上设计了芯片位姿定位算法的总体方案;最后,基于模板匹配算法和点集配准算法,对芯片位姿定位算法进行详细设计与实现。
参考文献(略)