本文是一篇机械论文,本研究开展了类肤双互锁型触觉传感的结构设计,建立了柔性导电复合材料调配流程与传感器的低成本逐层制造工艺,研制了类肤双互锁型触觉传感器的样机,进而设计并搭建了服务于视觉障碍人群的盲文输入系统,对基于柔性触觉传感器的人机交互系统的发展具有重要意义。
第1章 绪论
1.1 研究背景与意义
《中华人民共和国国民经济和社会发展第十四个五年规划和2035年远景目标纲要》[1]提出加快数字化发展,聚焦传感器等关键领域,以传感器技术创新、感知交互设备和软件的开发等推动数字经济重点产业的发展。人体通过皮肤中的众多的触觉感受器感知外部环境中的压力、温度、振动等触觉信息,经大脑处理后构建出对外部环境的认知,进而产生精确的交互行为[2]。柔性触觉传感器可模拟人体皮肤,紧密贴合在人体或机器人表面,适应被操作物体的形状,承受运动产生的形变等,模拟人感觉信息的感知技术构建环境信息,产生信息交换与反馈,进而与人、机、环境产生交互,完成复杂的操作任务。尤其在获取精确的定位信息、物体物理特性与接触状态等方面具有显著优势,可数字化解析生物触觉感知系统,为重现真实可靠的外部环境提供更加全面的信息。因此,柔性触觉传感器可贴合在假肢、机器人的复杂表面,实现基于触觉反馈的灵巧操作[3]。此外,触觉传感器也可穿戴在人体上,实时监测人体脉搏[4]、动作[5],在健康监测[6]、远程医疗[7]、交互式娱乐[8]等方面有着广阔的应用场景。
柔性触觉传感器的检测原理有压阻式[9]、电容式[10]、摩擦电式[11]、磁场式[12]等。其中,压阻式触觉传感器利用导电元件检测外部力施加时的产生电阻变化,实现对接触力的测量。压阻式触觉传感器因具有结构简单、可调控性高、制造及检测方法简单等特点[13],得到了较为广泛的应用,但受敏感材料自身的迟滞性等限制,其检测性能仍有待提升。结合传感器的结构设计与系统化集成,可优化压阻式传感器的性能。此外,压阻式传感器依赖于导电材料自身形变引发的电阻变化,纳米导电复合材料制成的敏感材料,厚度较小者对拉伸敏感常用于应变检测,厚度较大者可用于较大范围的压力检测,但会影响穿戴者动作与舒适度。对于较为广泛的压力检测应用场景,无法解决敏感材料厚度与检测范围之间的矛盾。因此,如何设计在大检测范围内具有高灵敏度、可重复性、低迟滞与低响应时间的柔性触觉传感器,使其在接触压力检测的应用场景中稳定发挥作用具有重要的研究意义。
..........................
1.2 国内外研究现状
触觉传感器可基于不同的传感原理,实现压力、温度、湿度等触觉信息的检测。合理利用各种传感原理,结合传感器结构设计等方法,可使传感器具有高柔性、高灵敏度、高可重复性和宽检测范围等性能。近年来,许多学者基于不同的触觉传感原理,围绕传感器的结构设计与人机交互应用等开展了深入的研究。
1.2.1 柔性触觉传感器的分类
基于不同的传感原理与敏感元件结构设计,触觉传感器能将压力、温度、振动、滑移等复杂的外部触觉刺激转化为易测量的形式,从而实现对周围环境的感知。柔性触觉传感器根据传感原理的不同,可分为电容式、压阻式、压电式触觉传感器等,近年来,一些基于其他检测原理的传感器研究也取得一定进展。
芬兰坦佩雷大学V. Sariola[17]等提出了一种全植物材料可生物降解的电容式触觉传感器,涂覆有银纳米线(AgN W)的叶骨架用作柔性电极,冻干玫瑰花瓣用于介电层,如图1.1所示。叶片骨架在微观尺度上显示出相互连接的静脉状,反复弯曲后也不会折断,此外,叶骨架的分形结构,可提供良好附着力,并在电极弯曲时保持银纳米线之间的互连。将玫瑰花瓣去除水分制成介电层,该工艺保有了花瓣的微观结构和3D细胞壁网络的同时,提高了介电层的稳定性和保质期。细胞壁网络为可压缩结构,受压后会弹性收缩,有助于提高传感器的灵敏度。制造的传感器可以响应0.007-60 kPa的压力,最大灵敏度约为0.08 kPa-1。
.........................
第2章 类肤双互锁型触觉传感器的结构设计及有限元仿真
2.1 引言
近年来,物联网在医疗、交通、工业生产等领域受到了广泛关注。物联网可通过先进的传感器技术检测和识别周围的声、光、力等信息,从而实现人、机、环境间的交互[24,52,53]。众多传感器中,柔性触觉传感器可贴合在非结构化的曲面,能实时检测接触力、压力[14]、温度[15]、振动[41]、滑移[54]等信息。柔性触觉传感器因其检测原理的不同,可分为压阻式[55]、电容式[56]、压电式[57]等。其中,压阻式触觉传感器因其具有易制造和集成、不易受噪声影响、检测方法简单、性能可调等优势吸引了国内外学者的关注[9]。在压阻材料调节性能的基础上,引入微结构的设计是提升传感器性能的重要方法。微结构可以增加应力集中点或接触面积,从而提高传感器灵敏度等性能,但与此同时,也带来了结构制造工艺复杂、制造成本高、宽量程内存在多段灵敏度等问题。此外,压阻式触觉传感器在大量程内实现压力检测,通常需要较厚的多孔结构实现,较薄的敏感材料往往受压电阻变化有限,因而导致其作用量程较小或产生多段较大差异的灵敏度曲线;对于拉伸型的压阻材料,通常需要施加较大的拉伸形变从而获取明显的电阻变化,限制了传感器的应用场景。在柔性传感器中,敏感材料与结构本身具有较大的柔性,需要考虑辅助结构使传感器中的核心结构充分发挥其特性。因此,有必要研制一种用于宽量程压力检测的压阻式柔性触觉传感器,在较大检测范围内具有良好线性灵敏度的特性。
本章在分析了柔性触觉传感器在实际应用场景下的设计要求,结合复合纳米导电材料在拉伸应变下电阻变化的特性,提出了一种类肤双互锁型柔性触觉传感器的结构设计,实现了将压力转换为薄型敏感材料的拉伸形变,通过检测其电阻变化实现接触压力的检测。针对设计的类肤双互锁型触觉传感器的单元结构,建立了传感器的有限元仿真模型,对互嵌微结构对、触觉传感单元、触觉传感阵列对力的感知效果进行了分析,验证了类肤双互锁型触觉传感器将压力转换为拉伸的能力。
............................
2.2 类肤双互锁型触觉传感器的结构设计
2.2.1 柔性触觉传感器的设计要求
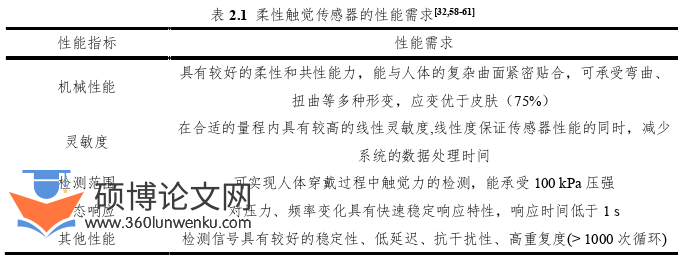
柔性触觉传感器在智能机器人、可穿戴设备上的应用越来越广,主要用于对压力、温度、湿度、滑移等触觉信息的检测与识别。在以上物理量中,压力检测是人或机器人感受外界机械刺激最直接的方式之一。其次,触觉传感器应用于可穿戴设备或机器人上时,需要与人体或物体的复杂曲面紧密贴合,减少装载应力,提高触觉信息检测的准确性。因此,对柔性触觉传感器的柔性和共形能力提出了要求。此外,柔性触觉传感器应用在人机交互等领域时,为保证良好的感知能力,需要其具有较快的响应时间、良好的动态响应性,且具有较高检测灵敏度和重复性,线性灵敏度能降低系统的数据处理时间与集成成本等,且在使用过程中,稳定性与抗干扰性卓越。
本文以高灵敏宽量程的接触压力检测作为柔性触觉传感器的设计目标,以结构传感器的人体穿戴及交互应用为背景,列出了柔性触觉传感器的设计目标如表2.1所示。
机械论文怎么写
...........................
第3章 类肤双互锁型触觉传感器的微制造方法及工艺 ..................................... 35
3.1 引言 ...................................... 35
3.2 柔性导电复合材料的制备与性能表征 .................................... 36
第4章 类肤双互锁型触觉传感器的性能测试及实验 ........................ 48
4.1 引言 ................................... 48
4.2 类肤双互锁型触觉传感器的触觉力性能测试系统搭建 ...................... 49
第5章 基于类肤双互锁型触觉传感器的盲文输入系统设计及实验 .......................... 61
5.1 引言 .................................. 61
5.2 盲文输入系统的整体设计方案 ............................ 62
第5章 基于类肤双互锁型触觉传感器的盲文输入系统设计及实验
5.1 引言
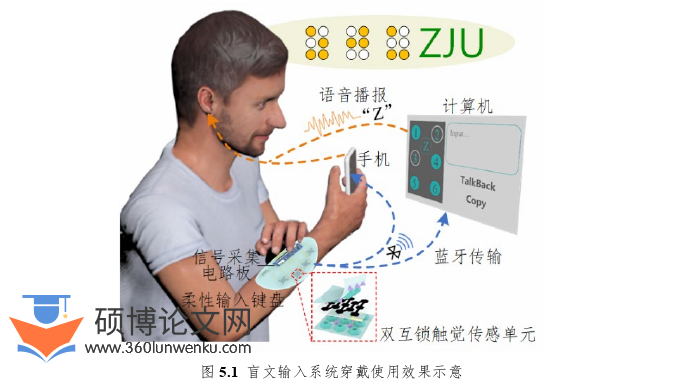
目前,可穿戴电子设备中采用柔性传感器,来实时监测人体状态、获取接触物体物理特性等,具有广泛的应用前景。柔性触觉传感器因其具有较高柔性,可贴合装载在非平面物体,实现了设备的可穿戴性。其次,本文提出的类肤双互锁传感器具有较好的线性灵敏度,减少了数据处理时间,可快速地将触觉信号传输出去。在基于触觉信号的人机交互中,学者普遍关注于阈值和空间位置分布等特征,或采用机器学习算法综合性得出结论,对触觉信号随时间变化的特性研究较少,只关注瞬间的触觉信号,造成了信息损失。因此,对触觉信号特征提取的研究还有待深入。
世界卫生组织的统计数据显示,2021年约有22亿人患有视力障碍,其中2.002亿人患有中度或重度视力障碍或失明[78]。随着电子设备的进步,辅助视力损伤的方法也得受到了关注[79,80]。在电子设备上实现文本输入,语音输入是最常规且适用面最广的方法[81,82]。语音输入主要依靠语音识别算法,近年来语音输入的准确率有了很大的提高。但是,在噪音环境和需要保护隐私的情况下,以及考虑到人们在公众场合的社交习俗,语音输入可能不是最好的选择。另一种电子设备上常见的辅助功能为读屏,语音播报出用户在屏幕上关注的信息。使用读屏软件输入文字,在常规的QWERTY键盘上,需要用户反复定位并听取语音判断相对位置关系,才可以完成一个字母的输入,而且对于触摸屏的电子设备来说,屏幕上键盘之间的字母排列紧密,很容易出现误触,降低了输入的正确率。触觉和听觉可以在一定程度上减少视力缺乏相关的限制。因此,许多基于触觉和听觉的人机交互技术用以辅助视觉障碍人群[49,83-86]。
机械论文参考
..............................
第6章 总结与展望
6.1 全文总结
柔性触觉传感器可贴合在非结构化物体表面,实时采集触觉信息,是人机交互系统中信息转换的重要媒介,对提升人-机-环境之间的共融交互具有重要意义。当前,触觉传感器的灵敏度与检测范围的性能需求无法平衡,存在高灵敏度范围窄、量程内存在多段灵敏度等问题,使其在人机交互系统中的使用受限。因此,需设计在较大检测范围内具有较高线性灵敏度和快速响应能力的触觉传感器,使其在交互系统中快速稳定发挥作用,实现触觉信息的传递与转换。为此,本文在国家自然科学基金“基于全柔性类肤感知系统设计的机器人多模态触觉感知机理及检测技术研究”(项目编号:52175522)和浙江省自然科学基金“智能机器人的全柔性多模态触觉感知系统设计及共融交互研究”(编号:LR19E050001)的资助下,开展了类肤双互锁型触觉传感的结构设计,建立了柔性导电复合材料调配流程与传感器的低成本逐层制造工艺,研制了类肤双互锁型触觉传感器的样机,进而设计并搭建了服务于视觉障碍人群的盲文输入系统,对基于柔性触觉传感器的人机交互系统的发展具有重要意义。论文完成的主要研究工作总结如下:
(1) 针对宽量程内高线性灵敏度性能需求,提出了类肤双互锁型触觉传感器的结构新设计,能有效地将传感器的受压变形转换为敏感结构的拉伸应变,建立了传感器的触觉力有限元模型,研究了传感器微结构对触觉力检测性能的影响规律。
(2) 提出了用于类肤双互锁型触觉传感器的敏感纳米导电复合材料的制备方法,开展了敏感材料的力学与电学性能表征测试;进一步,研究了触觉传感器的逐层微制造与封装工艺,完成了类肤双互锁型触觉传感器的样机制造。
(3) 针对研制的类肤双互锁型触觉传感器,搭建了传感器的性能测试系统,开展了传感器触觉力检测性能的测试与标定,验证了传感器在0.05 ~ 25 N宽量程检测范围内具有0.767 N-1的高线性灵敏度,并通过测试实验验证了传感器的大量程(~150 kPa)力分布检测能力和快速响应性。
参考文献(略)