本文是一篇机械论文,本论文在进行动力学建模时,使用的是柔性机械臂最具代表的单连杆柔性机械臂进行研究,在以后的研究中可以考虑将其拓展到多连杆柔性机械臂。
第1章 绪论
1.1 研究的目的及意义
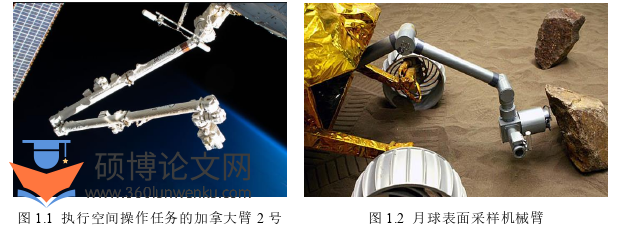
随着全球新一轮科技革命和产业变革突飞猛进,机器人学已经取得了空前的发展,如今已成为一门非常综合性的学科,涵盖了控制工程学、计算机学、机械工程学等多个学科[1]。机械臂作为机器人学的一个重要分支[2],正在不断向着高速运动和高精度定位的方向发展。因机械臂具有高灵活性、高效率、高安全性等优势,被广泛应用于制造业、农业、服务业、军事及航空航天等多个领域。随着对太空的探索,空间机械臂在太空中需要完成的工作越来越复杂,对其结构和性能的要求也不断增加。为了降低运输过程中的发射成本和工作时的能量消耗,并保证其高灵活性,越来越多的空间机械臂采用低刚度的材料进行设计。图1.1为国际空间站主要的机械臂——加拿大臂2号[3],其完全伸展开的长度为17.6m。图1.2为嫦娥五号探测器所带的月球表面采样机械臂[4],其完全伸展开的长度为4.3m。上述空间机械臂的共同特点是机械臂的臂展都比较长,过长的柔性机械臂臂展使其刚度下降,因而在快速运动到目标位置的过程中容易发生弹性变形,影响空间机械臂的正常工作。
机械论文参考
机械臂根据设计时用的材料不同,可以分为刚性机械臂和柔性机械臂[5]。刚性机械臂为了降低弹性变形,其组成的各个部分均采用刚性材料,尽管在一定程度上降低了弹性变形,但也使其设计比较笨重,难以实现灵活性的操作。与传统的刚性机械臂在进行设计和材料选取的时追求非常高的刚度不同,柔性机械臂的设计一般采用细长的样式,此设计的方式需要的材料更少、重量更轻、具有更高的运行速度,这样的设计使得柔性机械臂的旋转半径增大同时减轻了自身的重量[6]。
.............................
1.2 国内外研究现状
柔性机械臂诞生于70年代,是美国宇航局的研究项目之一,该项目的目标是通过制造更轻、更紧凑的控制器来降低航天器进入轨道的发射成本[20]。由于柔性机械臂的本身结构特点,其本质上是以无穷多个自由度为特征的连续动力学系统,并由非线性耦合的常微分方程和偏微分方程控制。在理论上具有无穷维的特征,导致其在建模方面存在较大的困难。
1.2.1 柔性机械臂建模理论研究
(1)柔性机械臂动力学方程推导
柔性机械臂承受扭转、弯曲和压缩,承受弯曲的连杆通过其挠曲变形储存势能,通过其挠曲率储存动能,一个好的模型必须包括这种分布特性。为了包含弯曲的影响,学者们通常将柔性机械臂假设成Euler–Bernoulli梁进行研究。目前,推导柔性机械臂系统动力学模型的代表方法主要有Newton-Euler方程法、Lagrange方程法、Hamilton原理法和Kane方程法[21]。
1)Newton-Euler方程法
Newton-Euler方程法通常运用质心运动定理和质心动力矩定理列出隔离物体的动力学方程[22]。Zhang, Xiaolei[23]运用Newton-Euler方程法和有限段法建立了N自由度的空间柔性机械臂数学模型,并基于此模型对空间柔性机械臂的运动特性进行了研究。Neeta Sahay[24]基于Newton-Euler方程法建立了三连杆柔性机械臂动力学模型,提出了求该模型解析解的方法。Natraj Mishra[25] 通过使用Newton-Euler方程法结合假设模态法得到了柔性机械臂的动力学模型,研究了柔性对具有两个旋转关节的双连杆柔性机械臂动力学的影响。Newton-Euler方程的主要优点是其运动方程始终具有相同的基本形式,而不受刚体的几何形状、惯性和运动约束的影响[26]。然而,Newton-Euler方程法的约束力或力矩必须确定,当系统由许多物体组成时,这些参数的确定是相当困难的[27]。此外,在实际应用中Newton-Euler方程普遍存在方程数量多、计算复杂、运算量大的缺点。
..........................
第2章 柔性机械臂系统的建模
2.1 引言
柔性机械臂系统是一种高度复杂的非线性系统,其具有无穷多个自由度,相应的模型也具有无穷维度。为了研究分析柔性机械臂的特性,需要解决如何使用有限维度的模型来近似描述该系统问题。
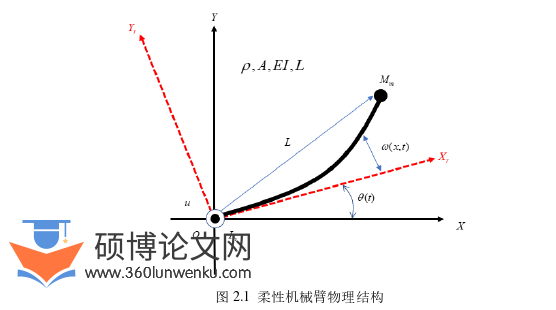
本章旨在研究柔性机械臂中的单连杆柔性机械臂,相较于多连杆柔性机械臂,单连杆柔性机械臂更容易设计和测试且它还具有多连杆柔性机械臂的基本挑战,为单连杆柔性机械臂找到的解可以被用于多连杆柔性机械臂[80]。为了研究柔性机械臂的振动特点以及明确系统的一些特性参数,对柔性机械臂建模时将其近似为Euler-Bernouli梁。运用Hamilton原理推出柔性机械臂系统的PDE动力学模型,由于对PDE动力学模型进行控制器设计是非常困难的,因此运用AMM对PDE动力学模型进行降维,建立了ODE动力学模型并推导出状态空间方程表达式。通过状态空间方程可以获得系统中状态和控制扭矩之间的非线性耦合关系。
.........................
2.2 柔性机械臂的动力学模型建立
机械论文怎么写
........................
第3章 基于输出反馈的柔性机械臂自适应位置跟踪控制 ................ 25
3.1 引言 ....................................... 25
3.2 状态观测器设计 ............................ 25
第4章 具有输出约束的柔性机械臂自适应位置跟踪控制 ................ 38
4.1 引言 .................................... 38
4.2 控制器设计 .............................. 38
第5章 柔性机械臂系统虚拟样机动力学建模与控制仿真 ................ 49
5.1 引言 ....................... 49
5.2 联合仿真流程 ...................... 50
第5章 柔性机械臂系统虚拟样机 动力学建模与控制仿真
5.1 引言
柔性机械臂的位置跟踪精度主要取决于两个方面:一是精确的动力学模型,二是控制器的控制精度。本文都是基于柔性机械臂的状态空间方程表达式设计的控制器,在状态空间方程表达式推导的过程中,对柔性机械臂的参数做了简化处理,导致模型精度降低。针对上述问题,本章运用Adams虚拟样机仿真分析软件建立柔性机械臂虚拟样机并结合MATLAB/Simulink进行了联合仿真平台的搭建和实验分析。
目前,柔性机械臂系统的研究主要聚焦于静力学、运动学和动力学三个方面。而Adams虚拟样机技术则主要用于动力学和运动学分析研究,也被称为机械系统的动态仿真技术[86]。通过Adams所构建的模型可以反映出物理样机的某些特征,如空间位置、运动学和动力学特征,因此在进行实物搭建时可以先在计算机上搭建其物理样机模型,并进行物理仿真、测试和评估来获得实际工程中需要的相关参数[87]。虚拟样机可以通过其在设计仿真过程中的反馈参数不断地指导设计,以确保产品寻优开发的顺利进行[88]。对于Adams动力学仿真软件来说,难以完成复杂的控制器设计,而MATLAB/Simulink具有比较全面的控制仿真功能。所以通过结合Adams和MATLAB各自优势可以更好地完成复杂的虚拟仿真实验。
本章基于Adams虚拟仿真软件对设计的控制器进行验证,首先,运用SolidWorks三维建模软件对柔性机械臂进行建模,将柔性机械臂的柔性部分通过ANSYS对其进行网格划分;其次,在Adams虚拟仿真软件中导入柔性机械臂的三维模型,并使用ANSYS得到的模态中性文件替换柔性机械臂三维模型中的柔性部分,从而在Adams中建立了柔性机械臂虚拟样机模型;最后通过Adams导出可以用于MATLAB/Simulink仿真的文件,在MATLAB/Simulink搭建联合仿真实验平台,将仿真后生成的.res文件导入到Adams的后处理中。通过分析在Adams后处理中的仿真结果,以验证所设计控制器的可行性和有效性。
...............................
第6章 总结与展望
6.1 总结
本文研究了柔性机械臂系统中最具代表性的单连杆柔性机械臂的位置跟踪控制问题,主要的研究结果如下:
(1)将柔性机械臂简化为Euler-Bernoulli梁,结合Hamilton理论建立了柔性机械臂的PDE动力学模型,然后使用AMM对柔性机械臂系统的PDE动力学模型进行降阶,得到了ODE动力学模型推导出状态空间方程表达式。根据柔性机械臂的状态空间表达式建立了反映Euler–Bernoulli梁高阶模态的柔性机械臂动力学模型。
(2)针对柔性机械臂在实际工作中高阶模态难以全部通过测量得到,设计了状态反馈控制器。利用柔性机械臂系统的输入和输出信息来重构系统的模态信息,以获得系统中不可测高阶模态。提出柔性机械臂位置输出反馈跟踪的自适应控制方法,运用MATLAB/Simulink仿真分析对比了输出反馈自适应控制和传统自适应控制在柔性机械臂位置跟踪中的效果,验证了输出反馈自适应控制的有效性和可行性。
(3)针对具有输出约束的柔性机械臂系统,提出了基于BLF的柔性机械臂位置输出反馈跟踪的自适应控制方法。分别利用常值对数型和时变对数型BLF对柔性机械臂系统的输出进行约束限制,运用MATLAB/Simulink软件对设计的两种控制器进行对比仿真分析。结合MATLAB/Simulink搭建了联合仿真实验平台,并完成了柔性机械臂虚拟样机联合仿真实验。分析实验结果证明了基于时变对数型BLF位置跟踪控制器对柔性机械臂实际控制结果的可行性和有效性。
参考文献(略)