本文是一篇电气自动化论文,本文对五相六桥臂功放的开路故障和短路故障展开了关于故障诊断和容错控制的一系列研究,并通过仿真和实验验证提出的故障诊断方法和容错方案。
第一章 绪论
1.1磁轴承功放的研究背景
随着经济的快速发展和工业技术的不断进步,高速和超高速电机渐渐被应用于各个工业领域。目前,在大多工业领域中高速电机仍采用滚珠轴承,然而,滚珠轴承存在的高损耗、高噪音等缺点使其难以应用于某些高精尖行业,因此,研究人员将目光聚焦到磁悬浮轴承上。磁悬浮轴承是通过利用定子与转子之间的磁力实现转子稳定悬浮的无接触轴承,它具有无接触、低损耗、高精度、高转速、使用寿命长、可智能控制等优点,在真空技术、机械加工、高速电机、航空航天、医疗设备、军事装备等领域被广泛应用,对科学技术的发展有着举足轻重的作用[1-6]。
磁悬浮轴承系统根据其悬浮力的不同提供方式,主要划分为三种类型:被动磁轴承、主动磁轴承、混合磁轴承。其中,被动磁轴承主要依赖于超导体或永磁体所产生的磁力来实现轴承的稳定悬浮;主动磁轴承主要通过电磁线圈构建偏置磁场,以实现轴承稳定悬浮状态;混合磁轴承则是兼具被动磁轴承和主动磁轴承的特性,利用永磁体提供的稳定磁场和电磁线圈提供的可控磁场共同作用实现对轴承的悬浮控制[7]。磁轴承系统一般由五大关键部分构成,分别为电磁铁定子、转子、位移传感器、控制器以及功率放大器[8],基本工作原理如图1.1所示,位移传感器实时将转子位移反馈给控制器系统,控制器依据控制算法计算得开关管控制信号,功率放大器通过开关信号控制开关管产生电流信号,一方面将其反馈至控制器系统,一方面将其传至线圈中,产生相应的电磁力。
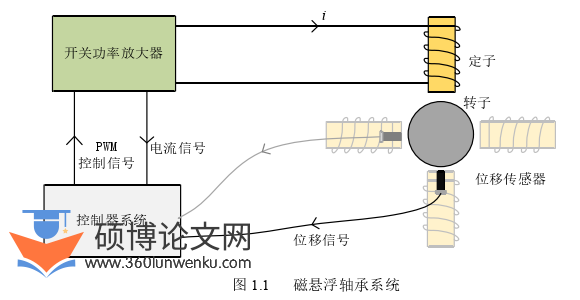
代写电气自动化硕士论文磁悬浮轴承系统图
.......................
1.2磁轴承功放故障诊断技术研究现状
磁轴承由于其高精度、微小振动、低噪声运转等特点,被广泛应用于高速机械、航空航天设备、微波设备以及医疗器械等高精密行业,这些行业对系统的安全性和可靠性提出了极高的要求。目前关于磁轴承故障诊断和容错控制的研究大多集中在三个方面——传感器、控制器以及执行器,其中执行器容错包含功率放大器和定子线圈两部分[28]。与定子线圈发生故障的概率相比,功率放大器出现故障的概率更高[28],因此本文的主要研究对象为功率放大器。功率放大器对磁悬浮轴承控制系统有着极其重要的用途[30],在实际应用中,为了保证电流的稳定和系统的快速响应,开关管的工作频率往往会被设定在10~100kHz的范围内。然而,由于开关器件频繁地切换开关状态,极易因为过压、过流或过热等问题引发开路或短路故障。故障一旦发生,很可能导致转子停转与跌落,从而产生巨大的冲击和强烈的震动,对电机造成不可挽回的损伤,更甚者可能会引发火灾等重大安全事故[31]。因此,确保开关管的安全稳定运行非常关键。功率放大器系统中,功率开关管的故障率高达38%[32],使其成为整个驱动系统中故障发生率最高的环节,因此本文的故障诊断和容错控制将聚焦在功率放大器的开关管上。
......................
第二章 磁悬浮轴承五相六桥臂开关功放故障分析
2.1五相六桥臂开关功放的工作原理
五相六桥臂开关功放在原有的五个负载桥臂的基础上增加一个公共桥臂,从而构成完整的电流回路,实现五相电流的独立输出,拓扑结构如图2.1所示。五相六桥臂功放由一个公共桥臂N相和五个负载桥臂(A、B、C、D、E相)构成,公共桥臂的中点连接各相负载(La、Lb、Lc、Ld、Le),构成五个独立回路,实现对五个自由度的独立控制。
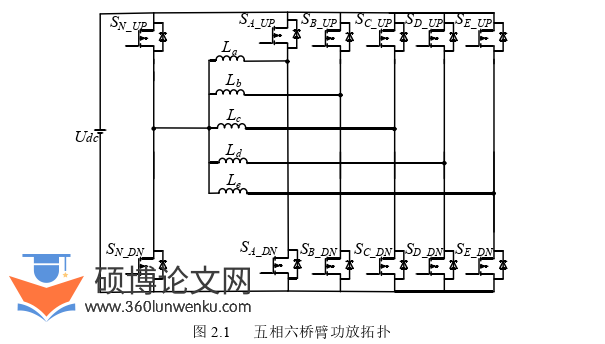
代写电气自动化硕士论文五相六桥臂功放拓扑图
本课题采用单周期控制算法对五相六桥臂拓扑进行控制,首先固定公共桥臂开关管的占空比为0.5,然后采样每一相的实际电流,将参考电流与实际电流做差,即可根据单周期算法计算得各负载桥臂的占空比,通过公共桥臂开关管与负载桥臂开关管相互配合,控制每一相负载线圈的电流周期平均值等于参考电流周期平均值,即负载线圈的实际电流跟踪上参考电流,从而产生期望的悬浮力,实现对转子五个自由度的稳定悬浮。
...........................
2.2五相六桥臂开关功放故障分析
开关器件是功率放大器模块中最容易发生故障的部分,因此本文将五相六桥臂开关功放的容错策略主要聚焦在开关管的故障问题。五相六桥臂开关功放的五相负载桥臂的工作原理相同,因此本节只以A相为例进行分析,其余四相的工作原理与此相相同。A相拓扑如下图2.2所示,其中两个桥臂分别为公共桥臂N相与负载桥臂A相。
功率开关管主要存在两种故障类型,即开路故障和短路故障,本文的研究重点将集中在单个开关管的开路故障与短路故障的诊断与容错控制上,故可对故障点进行如下分类:
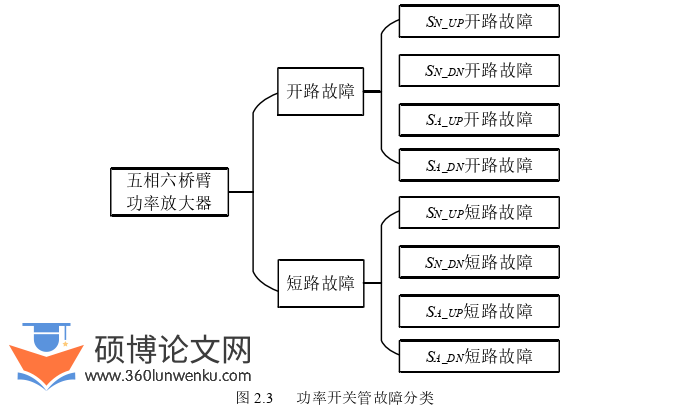
代写电气自动化硕士论文功率开关管故障分类图
...............................
第三章 具有定位功能的多桥臂开关功放故障诊断方法 .................... 23
3.1 基于电流误差的故障诊断方法及定位 ................ 23
3.1.1 基于电流误差的诊断方法 ..................23
3.1.2 基于电流误差的故障定位 ........................ 26
第四章 具有容错功能的五相六桥臂拓扑 ........................ 41
4.1 容错拓扑结构及工作原理 ................ 41
4.1.1 开路容错原理 ...................................... 42
4.1.2 短路容错原理介绍 ....................... 43
第五章 具有容错功能的五相六桥臂拓扑故障诊断与容错实验 ........ 54
5.1 硬件实验平台介绍 ............................ 54
5.1.1 控制系统 .................................. 54
5.1.2 功率放大器电路 .................. 55
第五章 具有容错功能的五相六桥臂拓扑故障诊断与容错实验
5.1硬件实验平台介绍
本文提出的五相六桥臂容错拓扑的控制结构如图5.1所示。
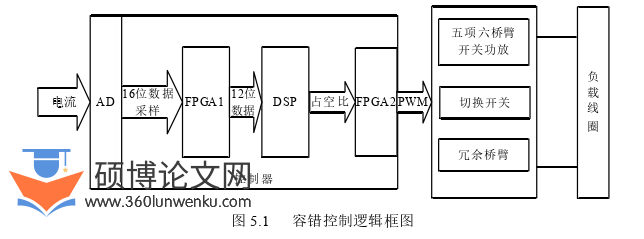
代写电气自动化硕士论文容错控制逻辑框图
在正常工作情况下,负载电流通过AD芯片采样,将电流模拟量转变成16位数字量,然后此数字量被传输至第一块FPGA,第一块FPGA再将电流数字量传送至DSP芯片,DSP将位移环计算出来的参考电流(iaref、ibref、icref、idref、ieref)与实际电流作差,根据单周期算法计算占空比,然后通过并行总线将占空比传输到第二块FPGA芯片,第二块FPGA经过比较运算输出PWM信号,之后PWM信号传至功率放大器中,以完成稳定跟踪参考电流。
在发生故障时,第一块FPGA将故障电流信号数字量输出至DSP,DSP经过故障参数的比较计算,诊断出故障类型并定位到故障开关管,之后针对故障类型与故障开关管的位置,控制不同的切换开关进行容错,将故障桥臂的开关信号重构至冗余桥臂,以冗余桥臂替代故障桥臂工作。DSP将正常桥臂占空比、故障信号、切换电路信号、冗余桥臂信号均输出至第二块FPGA,使FPGA输出对应的PWM信号,以此控制开关管工作,完成故障容错。
............................
第六章 总结与展望
6.1全文总结
随着工业技术的不断发展,磁悬浮轴承的应用越来越广泛,人们对其安全性和可靠性的要求也随着越来越高。功率放大器是磁悬浮轴承系统重要的组成部分,也是最为容易出现故障的部分,目前众多学者对其展开故障诊断和容错控制的研究,以期望能够提高功率放大器的安全性能。在此背景下,本文对五相六桥臂功放的开路故障和短路故障展开了关于故障诊断和容错控制的一系列研究,并通过仿真和实验验证提出的故障诊断方法和容错方案。
本文的主要研究内容如下:
(1)本文针对五相六桥臂功放的开路故障和短路故障后的电流特征,对基于电流误差的故障诊断法、基于电流斜率变化量的故障诊断法和基于电流比例的故障诊断法展开研究。基于电流误差故障诊断法的故障参数为参考电流与实际电流的误差值,一旦此误差值超出阈值,则判定为故障。基于电流斜率变化量故障诊断法的故障参数为相邻两个周期电流斜率的变化量,设置阈值与此变化量比较,当超出阈值时即可判定为系统故障。基于电流比例的故障诊断法为重构一个实际电流与参考电流的比值函数,然后将此函数值进行运算,构造两个参数S与D,根据S与D的值是否为零判断故障。当诊断出系统故障后,分别根据故障后的电流特征和故障诊断参数变化,设计相应的故障诊断方法。
(2)本文针对五相六桥臂功放的开关管故障提出了多桥臂容错开关功放,其同时具有开路容错和短路容错功能。当五相六桥臂功放的开关管开路故障时,关闭故障桥臂的开关管信号,同时打开故障桥臂相应的切换开关,并将故障桥臂信号重构至冗余桥臂,使冗余桥臂替代故障桥臂工作。当五相六桥臂功放的开关管短路故障时,整个短路故障容错分为诊断出故障、熔断保险丝、信号重构三步,根据故障诊断信号诊断出开关管短路故障后,关闭所有开关管信号,同时打开相应的切换开关和冗余桥臂的开关管,熔断保险丝,以切断故障桥臂与健康桥臂的联系,然后打开健康桥臂开关管信号,并将故障桥臂信号重构至冗余桥臂,使冗余桥臂替代故障桥臂,完成容错。
参考文献(略)