本文是一篇电气自动化论文,本文设计了一款应用于洗衣机的DSRM控制器,并根据洗衣机所需的工作条件优化了控制算法。
第1章 绪论
1.1 课题背景及意义
人民物质生活与精神生活不断丰富的同时,洗衣机也逐渐进入每户家庭,并成为家庭中不可缺少的电器,用洗衣机清洁衣物已经成为最主要的洗衣方式[1]。经过多年发展,洗衣机的市场已经逐步稳定,在人们生活品质不断提升的同时,各种材质衣物的出现使人们对洗衣机的性能提出了更高的要求;为了迎合人们不断增长的使用需求,洗衣机生产厂家也不断更新产品,节约能源、外观潮流、运行稳定、除菌的产品不断走向市场,受到普通大众的欢迎[2-4]。2022年前三季度,虽然受疫情影响我国家电市场低迷,但洗衣机市场依然庞大,洗衣机厂商要想保持市场份额,只能不断提高产品性能。
当下,家用洗衣机产品按清洁方式可分为滚筒式、波轮式与搅拌式三类,它们都是以电机作为控制核心,直接或者通过传送带给洗衣机提供动力,使水与衣服产生相对运动从而达到清洗的目的[5]。电机是洗衣机的动力核心,洗衣机系统的洗衣效果、脱水效果均由电机性能所决定,电机调速性能影响了衣服的清洗效果,电机的效率影响了洗衣机整体的效率。
当下洗衣机销售市场已经逐步稳定,销售额度上升缓慢,为了重燃消费者的热情,增加居民生活幸福感,打破每户只有一台洗衣机的格局,很多厂家着手研发新型洗衣机,为用户家中增添多台洗衣机而努力[6]。新型洗衣机包括便携洗衣机、迷你洗衣机、洗鞋机等,都具有小型轻便的特点,因此发展转矩密度高的小体积电机是洗衣机发展的重中之重[7]。洗衣机的工作环境也对电机有着较高要求,洗衣机在运行中需要不停地做正反转起停运动,而且清洗状态与甩干状态有着很高的转速跨度,此外在运行时衣物的晃动会导致负载一直不能稳定,因此要使洗衣机系统有很好的速度响应,电机必须要有优秀的调速性能。
.........................
1.2 洗衣机电机现状与需求
1.2.1 洗衣机电机现状
自洗衣机出现以来,人们的洗衣方式迎来了明显的变化,各种材质的衣物不断满足人民穿着需求的同时,洗衣机的性能也要与时俱进地加以改良[11]。针对所洗服饰的不同,洗衣机也需要调整不同的转速、转矩,因此电机的速度响应至关重要。洗衣机驱动电机主要类型如下[12]:
(1)单相异步电机
单相异步电机的输入为单相交流电,拥有寿命长、制造成本低、结构稳定的优势,其缺点是不方便调速,效率低,因其成本低主要安装在双桶波轮洗衣机上[13,14]。
(2)变频感应电机
变频感应电机的运行离不开变频器与电机相互作用,变频器根据运行条件,通过空间矢量控制的方法进行调速,带动负载运行,因此该电机调速性能较好,且拥有明显好于异步电机的输出效率[15,16]。由于变频器的存在增加了电机的成本,且电机效率与调速性能不如永磁电机,这些劣势导致此电机在高端洗衣机上的应用不如永磁电机。
(3)无刷直流电机
无刷直流电机是与电力电子一同兴起的电机,没有转子绕组,由永磁体产生转子磁场,不需要电刷等机械结构,根据位置传感器采集的信号控制功率管实现电机运行[17,18]。其具有效率高、寿命长、在高低速都能稳定运行的优势,但是永磁体的使用导致其成本高,此外它控制器复杂的劣势阻碍了它进一步发展[19,20]。
.......................
第2章 盘式开关磁阻电机基本原理
2.1 DSRM调速系统
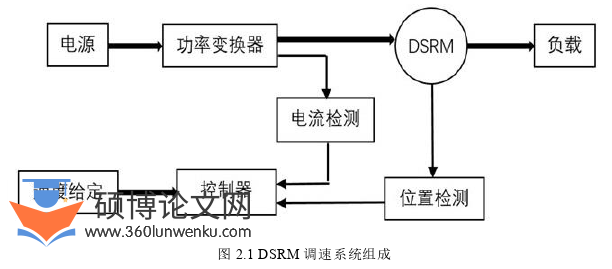
DSRM调速系统包括功率变换器、电流检测器、位置检测器、控制器和DSRM,各部分功能不同,通过互相协作,来保障调速系统的正常工作[47]。下面将重点介绍每个部分的作用与运行机制,系统框架如图2.1所示。
电气自动化论文怎么写
2.1.1 DSRM
DSRM调速系统通过DSRM将电能转换成动能,本节论述了此电机的结构与工作原理。
(一)电机结构
DSRM结构跟感应电机不同,其为双平面凸极结构。本小节以6/4级电机为例,介绍DSRM结构特点。
三相6/4极DSRM电机结构如图2.2所示。电机包括定子和转子两部分,此电机定子有6个凸极,转子有4个凸极,因此被称为6/4极电机[48]。定子包括定子盘、定子齿和绕组,定子齿沿圆周均匀分布在定子盘上,每个定子齿间隔60°,绕组绕在定子齿上,6/4级电机共有三相绕组,相对的绕组为一相。转子没有绕组,仅由转子齿与转子盘构成,转子齿均匀分布在转子盘上,每个转子齿间隔90°。定转子铁芯为了减少绕组励磁产生的涡流损耗,需采用卷绕的方式制造。
..........................
2.2 基本数学方程
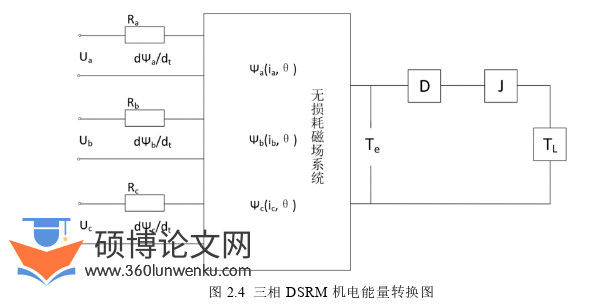
DSRM存在很多非线性因素,这些因素很难被数学归纳,为简化分析,忽略电源波动、绕组互感、磁路损耗、功率管压降的影响,来建立数学模型。以图2.4三相电机为例,整个系统可视为一个拥有三输入端、单输出端的机电装置,具体可分为电源输入,能量转换和机械输出三部分,这三部分可分别推出电压、机电转换、机械运动三组方程。
电气自动化论文参考
.............................
第3章 盘式开关磁阻电机控制算法 ................... 23
3.1 DSRM控制方式 ................................. 23
3.1.1 电流斩波控制 .............................. 23
3.1.2 角度位置控制 ................................... 24
第4章 控制器软硬件设计 .......................... 43
4.1 系统的硬件设计 ...................................... 43
4.1.1 单片机控制模块 ................................. 43
4.1.2 电源模块 ....................................... 44
第5章 盘式开关磁阻电机控制器性能测试 ................................ 61
5.1 测试平台 ........................................ 61
5.2 测试结果分析 .................................. 62
第5章 盘式开关磁阻电机控制器性能测试
5.1 测试平台
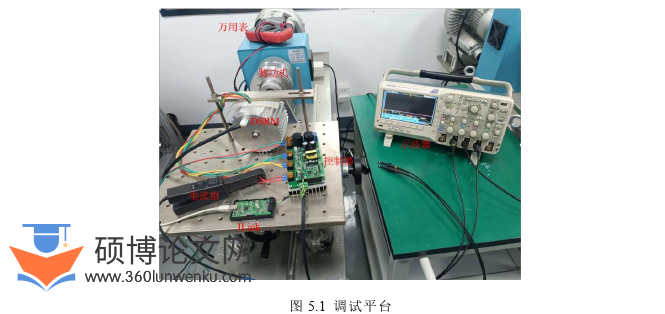
为验证角度自适应算法及双模糊PI控制算法的有效性,测试控制器总体性能,本文搭建了实验平台。该平台如图5.1所示,包括DSRM、控制器、电源、测功机、示波器、电流钳等部分。
电气自动化论文参考
........................
第6章 总结与展望
6.1 总结 本文设计了一款应用于洗衣机的DSRM控制器,并根据洗衣机所需的工作条件优化了控制算法。本文工作内容如下:
(1)介绍洗衣机电机的市场需求与发展趋势,对比DSRM与常用洗衣机电机的性能优劣。
(2)根据DSRM电机的结构原理,分析了DSRM相关方程的论证过程,介绍了电机线性模型、准线性模型的主要公式,重点说明了电机的转矩位置关系及基本控制策略,结合本文的具体应用场景,选择了APC、CCC相结合的控制方式。
(3)根据洗衣机系统对转速的较高要求,设计了双模糊PI控制算法;为了使开通角随系统负载自动调整,提出了开通角自适应策略;为解决电流拖尾问题,提高系统性能,给出了关断角自适应控制策略。通过仿真验证了上述控制策略的可行性。
(4)以兼顾系统成本与性能为前提,本文从硬件与软件两方面着手,设计出以STM32单片机为控制芯片的硬件电路,并根据上述控制算法编写了相应控制程序。
(5)搭建了测试平台,通过测试验证了系统的可行性。实验结果表明,本文设计的DSRM调速系统不仅能满足洗衣机系统的调速需求,还具有效率高、调速性能好的优势,为DSRM电机应用到洗衣机系统提供了理论及实践指导。
参考文献(略)